1
令和2年度 修士論文
分散型遺伝的アルゴリズムを用いた電源制
御用フィルタの自動設計および実機評価
指導教員 髙井 伸和 准教授
群馬大学大学院 理工学部 理工学専攻
電子情報・数理教育プログラム
髙井研究室
T191D004
新井 信吾
2
目次
研究背景・目的 ··· 4
1.1 研究背景 ··· 4 1.2 研究目的 ··· 5 1.3 本論文の構成 ··· 6デジタル制御電源 ··· 7
2.1 デジタル制御電源の構成と制御の流れ··· 7 2.2 デジタルフィルタ ··· 8デジタルフィルタの自動設計 ··· 9
3.1 デジタルフィルタの自動設計の概要 ··· 9 3.2 初期集団の生成 ··· 10 3.3 適応度の評価 ··· 10 3.4 分散型遺伝的アルゴリズムの適用 ··· 13 3.4.1 分散型遺伝的アルゴリズムの概要 ··· 13 3.4.2 エリート個体保存戦略「選択」 ··· 14 3.4.3 ルーレット選択「選択」 ··· 14 3.4.4 一様交叉「交叉」 ··· 14 3.4.5 摂動「突然変異」 ··· 14 3.4.6 移住 ··· 15 3.4.7 淘汰 ··· 16 3.4.8 分散型遺伝的アルゴリズムの設定 ··· 163
実機評価に用いたデジタル電源 ··· 17
4.1 実機におけるデジタル電源の概要 ··· 17 4.1 実機における損失 ··· 19実行結果 ··· 23
5.1 シミュレーション結果 ··· 23 5.2 実測結果 ··· 28第 6 章 まとめと今後の課題 ··· 32
5.1 まとめ ··· 32 5.2 今後の課題 ··· 324
研究背景・目的
1.1 研究背景
近年電子技術の発展やIoTの普及による電子機器の性能向上に伴い、供給す る電源電圧の仕様も高度で複雑なものになってきており、電源回路の性能向上 が求められている。現在よく使われている電源回路では出力電圧を安定させる ために出力電圧をフィードバックし制御回路で処理している。この制御回路の 構成には、アナログ制御方式とデジタル制御方式がある。アナログ制御方式で は、アナログフィルタ回路の特性や低負荷状態での動作モードの最適選択など の方法で、負荷の変化に対する応答と電源効率を改善することが できる。し かし、アナログフィルタ回路はアナログ演算回路で実現するので、使うトポロ ジーの組み合わせの制限により限られた制御しか行えず、加えて、コンバータ の仕様変更に受動素子の交換で対応する必要がある。 デジタル制御方式で は、アナログフィルタ回路の処理をDSPの数値演算で行うことにより、これら の問題を解消できるため高度な位相補償が可能となる。しかし、より高度なデ ジタル制御を実現するためにはDSPに実装するデジタルフィルタが高性能なも のでなければならない。従来のデジタルフィルタ設計では、アナログ・デジタ ル回路の知識やDSPによる演算処理のためのプログラミング知識、コンバータ の知識などが必要となり設計過程が複雑になる。さらに、電源とソフトウェア 両者を扱える設計者が限られてしまい、電子機器の需要に対して設計者が不足 している。そこで、プログラムによるデジタルフィルタ自動設計システムを構 築して設計者の負担を減らし、人件費と設計時間短縮を図る。5
1.2 研究目的
本論文では高性能なデジタル電源制御用フィルタ(以下「デジタルフィルタ」) をより簡易的に設計するために、デジタルフィルタを自動設計するシステムの 構築が目標である。デジタルフィルタの設計手法としてはアナログフィルタ理 論を利用する手法がよく知られており現在でも用いられている。この手法では アナログ領域で伝達関数の極とゼロ点の位置を選定して周波数特性を計算した 後、双一次変換を行いアナログ領域からデジタル領域へと変換する。この際、設 計の簡易化のために所望の周波数特性から伝達関数を計算するツールが一般的 に使われるが、その後の電源としての性能特性(以下「電源特性」)の調整は設 計者の知識と経験に依存してしまう。また、デジタルフィルタを直接設計する手 法もあるが数値演算手法を利用した理論体系で構成されており固定化された形 で一般化されてしまっている。そのため、高性能なデジタルフィルタを設計する ためには広範囲のデジタルフィルタ係数を経験や知識に依存せずに設計する必 要がある。一般的に広い探索範囲に対する最適解模索方法として“遺伝的アルゴ リズム(SGA: Simple Genetic Algorithm)”が提唱されている。遺伝的アルゴリ ズムとは生物が進化する過程で行われてきた選択・交叉・突然変異を模倣し、世 代を経て最適解を探索する計算方法である。しかし、SGA には最適解ではない がその個体の近傍では最もよい解(局所優良解)に陥りやすく初期集団に依存す るという問題点がある。局所優良解が出来てくるとそれが多く選ばれ、さらに個 体群の中での交叉によって類似した解でうめつくされてしまう。対策としては 常に一定数の個体(遺伝子)をランダムに作り変え解の多様性を維持する方法が あげられるが、ランダムで作った個体の評価値は低いため、進化した集団の中で はすぐに淘汰されてしまう。そのため、必要なのは進化した解の多様性を残すこ とであり、我々は新たに“分散型遺伝的ルゴリズム(DGA: Distribute Genetic Algorithm)”を用いてデジタルフィルタ係数を自動設計する手法を提案した。 分散型遺伝的アルゴリズムでは、母集団を複数の部分集団に分割し、その部分集 団毎に SGA の操作を行い、一定期間毎に移住や淘汰を行う。これにより、局所 優良解に陥る可能性を下げることに成功した。この手法により設計したフィル タの現実的有用性を確認するために TexasInstruments 社のデジタル制御電源 に実装し評価を行った。自動設計したデジタルフィルタの性能を評価するため に比較対象である Texas Instruments 社のデジタル制御電源に内蔵されていた6
デジタルフィルタ(2pole-2zero IIR フィルタ)の 電源特性と同じ次元で自動設 計したデジタルフィルタの電源特性をシミュレーションと実測の両方で比較し、 電源特性を確認したところ比較対象の結果に比べて、シミュレーションと実測 共に自動設計したデジタルフィルタの優位性が確認できた。また、3pole-3zero、 4pole-4zero においても自動設計を行い同様に測定したところ次元が上がるにつ れてシミュレーションと実測共に電源特性が向上していくことが確認できた。1.3 本論文の構成
本論文は本章を含めて 5 章で構成される。第 2 章では分散型遺伝的アルゴリ ズムを用いた自動設計の原理から学習モデルの設計手順及びシステムの設計に ついて述べる。第 3 章では GA の原理及び学習データ作成への応用について述 べる。第 4 章では GA で作成したデータの有用性の確認と、作成した学習デー タを用いて学習モデルを 2 種類構築し、それぞれの予測精度を確認する。ま た、作成した学習データでモデルの設計、システムの構築を行い、人間による 設計との比較結果を示す。第5章では本研究のまとめと今後の課題を述べる。7
デジタル制御電源
2.1 デジタル制御電源の構成と制御の流れ
デジタル制御電源の構成は図 2.1 のようになる。デジタル制御電源は制御対象 のパワーステージと制御用マイコン部分に分けられる。制御用マイコンは、A-D 変換器、DSP、PWM 生成器、通信インターフェース、それぞれの機器を制御す るマイコンの CPU から構成される。 デジタル制御の流れは以下のようになる。 まず、パワーステージの出力電圧 Vo を A-D 変換器でアナログ値からデジタ ル値に変換する。次に変換結果を DSP のデジタルフィルタで位相補償する。最 後にパワーステージの MOSFET の ON/OFF を指示する PWM 波形のデュー ティを調整する。出力電圧に変動が生じたときにこの過程で電圧を安定させる。図 2.1 デジタル制御電源の構成
8
2.2 デジタルフィルタ
一般的にデジタル制御電源のデジタルフィルタ設計は、アナログ制御器の伝達 関数を双一次変換することで行われる。まず、所望の特性を実現する式 (2.1) の アナログフィルタの伝達関数を作成する。 G(s) = 𝐾 (𝑠 + 𝑧 )(𝑠 + 𝑧 )(𝑠 + 𝑧 ) ⋯ (𝑠 + 𝑧 ) 𝑠(𝑠 + 𝑝 )(𝑠 + 𝑝 ) ⋯ (𝑠 + 𝑝 ) (2.1) 次に、この伝達関数を連続時間領域から離散時間領域へ変換する。変換には式 (2.2) を用いる。 s = 2𝐹 𝑧 − 1 𝑧 + 1 (2.2) 最終的に式 (2.3) のデジタルフィルタの伝達関数が導出される。 H(z) =𝑌(𝑧) 𝑋(𝑧)= 𝑏 + 𝑏 𝑧 + 𝑏 𝑧 + ⋯ + 𝑏 𝑧 1 − 𝑎 𝑧 − 𝑎 𝑧 − ⋯ − 𝑎 𝑧 (2.3) デジタルフィルタの特性を変える場合は式 (2.3) のパラメータである 「𝑎 𝑎 … , 𝑏 𝑏 𝑏 … 」の値を変更することで行う。9
デジタルフィルタの自動設計
3.1 デジタルフィルタの自動設計の概要
提案する手法は、分散型遺伝的アルゴリズムによるデジタルフィルタ(IIR フィルタ) の自動設計である。 デジタルフィルタの自動設計モデルは、数値計算ソフトの「Scilab」 で構築した。自動設計モデルは フローチャート図 3.1 に沿って設計した。 図 3.1 デジタルフィルタ係数自動設計フローチャート10
まず、プログラムを実行すると初期集団が生成される。 次に、この初期集団に対し て電源特性のシミュレーションが行われ、評価値が算出される。その評価値を元に、分 散型遺伝的アルゴリズムが適用され、その世代の母集団が形成される。以降、終了条件 が満たされるまで繰り返すことで最適解を探索する。3.2 初期集団の生成
初期集団で生成する個体では、評価値が算出できないような不安定なフィルタや乖離 しているデータが含まれていると正常に分散型遺伝的アルゴリズムを適用することが できない。そのため、評価基準の多いアナログフィルタ伝達関数で、電源の伝達関数を 含めて開ループ特性に以下の制限を設けて生成した。 ・位相余裕が 45 度以上である ・クロスオーバー周波数が 10kHz ~ 20kHz に収まっている ・ゲイン余裕が正の値である この制限を満たした個体に対して双一次変換を行いデジタルフィルタの形に直したう 上で、適応度の評価に移行する。3.3 適応度の評価
これらの電源特性は電源回路の状態が変化した際に現れるものであるため、値の取得 には回路シミュレーションが必要となる。そこで電源特性シミュレーションは数値計算 ソフト「Scilab」に用意されているブロック線図シミュレータ「Xcos」を用いた。Xcos では回路素子をブロック化して GUI で操作することができる。ブロック線図は図 3.2 のように構成した。自動設計したデジタルフィルタを用いて Xcos で電源特性をシミュ レーションする。シミュレーションする特性は出力電圧の負荷急変応答の立ち下がり時 のピーク特性(以下「立ち下がり特性」)とした。 負荷急変は、電源回路の出力抵抗の 値をスイッチングにより変更することで実現した。負荷抵抗の大きさなど各種パラメー タは実機評価に用いたデジタル制御電源のデータシート及び実際の挙動を基に調整し11
た(第4章を参照)。 得られた負荷急変応答から式 (3.1) の評価式に従い点数を付ける。 (3.1) 評価式は 立ち下がり特性とオーバーシュート、整定時間の 3 項目で構成されている。それぞれの 評価項目に対して、最小値 0 最大値 100 となるように正規化している。また立ち下が り特性と整定時間と重みづけを 2 倍に設定し評価値は最大 500 点となる。評価値 = 2 × 立ち下がり量 + オーバーシュート + 2 × 整定時間 (3.1)
図 3.2 電源特性シミュレーションのブロック線図 出力電圧変動の立ち下がり特性 負荷抵抗値の急激な変動によって起きる出力電圧の立ち下がりの最小値が基準電圧 に対して何パーセント変動しているかを立ち下がり特性として設定する。12
出力電圧変動のオーバーシュート 負荷抵抗値の急激な変動によって起きた出力電圧の立ち下がりを整定する際に基準 電圧を上回ったときの変動率をオーバーシュートとして設定する。 出力電圧の変動整定時間 負荷抵抗値の変動開始時刻から出力電圧の変動が基準電圧の±0.5%以内に収まった 時刻までの時間を変動整定時間として設定する。 出力電圧特性のデータ例を図 3.3 に示す。 図 3.3 出力電圧特性のデータ例13
3.4 分散型遺伝的アルゴリズムの適用
3.4.1 分散型遺伝的アルゴリズムの概要
本研究では、デジタルフィルタの自動設計手法として分散型遺伝的アルゴリズム (DGA) を適用する。分散型遺伝的アルゴリズムは生物の進化を工学的に模倣した最 適化手法である遺伝的アルゴリズムを並列処理することでより高精度に最適化を行う 手法である。デジタルフィルタの自動設計では、デジタルフィルタである“IIR フィル タ(Infinite Impulse Response フィルタ)”の全ての係数を図 3.4 のように個体の遺 伝子列として表現することで分散型遺伝的アルゴリズムによる手法の適用を可能とし ている。a
1
a
2
b
0
b
1
b
2
図 3.4: デジタルフィルタ係数から遺伝子列への変換例 遺伝的アルゴリズムにおいて、最適化対象の値を“遺伝子”、遺伝子を持つデータセ ットを“個体”と呼ぶ。最適化の方法は、最初に生成した個体に対して設定した評価式 で“評価”を行い、評価結果を基に個体を“選択”した後、“交叉”による個体間での遺伝子 の入れ替えや、 “突然変異”による特定遺伝子の変化を起こし、再び評価を行う。この 選択、交叉、突然変異、評価の一連の操作を得た個体の集合を次世代に引き継ぎ、世 代を重ねることで最適解に近づけることができる。 分散型遺伝的アルゴリズムでは、この遺伝的アルゴリズムの操作を部分集団(以下 「島」)で行い、一定世代毎に異なる島に“移住”を行い、ある島を“淘汰”することで単14
一集団である遺伝的アルゴリズムと比較してより優良な解を得ることが可能である。 本研究では、 遺伝的操作として「エリート個体保存戦略」「ルーレット選択」「一様交 叉」「摂動」を使用した。3.4.2
エリート個体保存戦略「選択」
個体群の中で最も評価値の高い個体をエリート個体として保存する。各遺伝的操作を 実行後、最も評価値の低い個体を保存したエリート個体に 置き換えることで、最も優 れた個体は交叉や突然変異により淘汰されず、 個体群の最高評価値を維持できる。3.4.3
ルーレット選択「選択」
ルーレット選択について図 3.5(a)を用いて説明する。ルーレット選択では各個体の評 価値に比例して、次世代に残る確率が決まる。図 3.5(a)のように、評価値に応じた⾧ さを持つように個体を並べ、ランダムな位置が選択される。これにより、評価値の高 い個体だけでなく評価値の低い個体も次世代に引き継ぐことでデータの多様性をもた らしている。3.4.4
一様交叉「交叉」
一様交叉について図 3.5(b)を用いて説明する。一様交叉では選択された個体間の遺伝 子を設定した確率でランダムに交換する。遺伝子の交換は、分母係数同士、分子係数同 士に限定され、その両方もしくは片方だけ行われる。3.4.5
摂動「突然変異」
摂動について図 3.5(c)を用いて説明する。摂動では選択された個体の遺伝子の一部ま たはゲイン K の値を設定した確率でランダムに変化させる。基本的に変化量は微量に 設定され、最適解近傍の解を最適解に近づける役割を担っている。15
個体 A 個体 B 個体 C 個体 D 個体 E (a) 個体 A 個体 B (b) 個体 N 個体 M (c) 図 3.5: ルーレット選択、一様交叉、摂動の例3.4.6
移住
移住は一定世代間隔で、各島の個体を「移民」として、島間の移住をさせる。移住に よって他の島で成⾧した遺伝子情報を持つ個体を取り入れることにより島内での進化 した解の多様性を維持できる a1 a2 b0 b1 b2 a1 a2 b0 B1 b2 A1 A2 B0 B1 B2 A1 A2 B0 b1 B2 a1 a2 b0 b1 b2 a1 na2 b0 b1 b2 a1 a2 b0 b1 b2 a1 a2 mb0 mb1 mb216
3.4.7
淘汰
淘汰は一定世代間隔で、最も適応度の低い島を消滅させ初期集団から再生成する操作 である。淘汰によって局所優良解近傍の個体しか存在しない場合でも新たに初期集団を 再生成することによって局所優良解への収束を回避することができる。3.4.8 分散型遺伝的アルゴリズムの設定
自動設計モデルの分散型遺伝的アルゴリズムは表 3.1 のように設定した。 表 3.1: 分散型遺伝的アルゴリズムの設定 個体数[個体] 50 世代数[世代] 200 選択エリート個体数[個体] 2 交叉率[%] 50 突然変異率[%] 90 島数[島] 3 移住間隔[世代] 5 移住個体数[個体] 10 淘汰間隔[世代] 1017
実機評価に用いたデジタル電源
4.1 実機におけるデジタル電源の概要
実機評価に用いたデジタル制御電源を図 4.1 に示す。実機評価に採用したデジタ ル制御電源の制御用マイコンボードには、「LAUNCHXL-F28379D」を用いた。また 降圧 DC/DC コンバータには「BOOSTXL-BUCKCONV」を用いた。このコンバータ の回路構成を図 4.2、仕様を表 4.1 に示す。 図4.1: Texas Instruments 社のデジタル制御電源18
図 4.2: 降圧型 DC-DC コンバータの回路構成 表 4.1: 降圧 DC-DC コンバータの仕様 項目 パラメータ 入力電圧 Vi [V] 9 出力電圧 Vo [V] 2 スイッチング周波数 [kHz] 200 主スイッチQ1オン抵抗r
Q1 [Ω] 0.008 同期整流用スイッチQ2オン抵抗r
Q2 [Ω] 0.0029 インダクタ L [uH] 4.8 DCR [Ω] 0.0105 出力キャパシタ C [uF] 396 ESR [Ω] 0.002 負荷抵抗 R [Ω] 7.5→1.519
4.1 実機における損失
シミュレーションと実機評価の間に起きる代表的な問題として特性が一致しないこ とがあげられる。これは、実機側で電力損失が起きることによって特性に誤差を生じ てしまっていることが原因である。そこで、実機側でどのような損失が発生している のかまとめることで実機とシミュレーションの整合性をとった。DC-DC コンバータ に発生する損失を表したものを図 4.3 に示す。 図 4.3 DC-DC コンバータに発生する損失 これらの損失を合計したものが DCDC コンバータ全体の損失として式(4.1)で表され る。 P = 𝑃 + 𝑃 + 𝑃 + 𝑃 + 𝑃 + 𝑃 _ + 𝑃 (4.1) PIC:IC の自己消費電力損失 PGATE:ゲートチャージ損失 PONH:ハイサイド MOSFET オン時のオン抵抗による導通損失 PONL:ローサイド MOSFET オン時のオン抵抗による導通損失 PSWH:スイッチング損失 Pdead_time:デッドタイム損失 PCOIL:インダクタの DCR による導通損失20
PIC:IC の自己消費電力損失 電源回路を制御するコントローラ IC の動作に必要な電力が損失となる。制御 IC の自 己消費電力損失の計算式を式(4.2)に示す。 𝑃 = 𝑉 + 𝐼 (4.2) Icc:IC の自己消費電流[A] VIN:入力電圧[V] PGATE:ゲートチャージ損失 ゲートチャージ損失は、外付け MOSFET の全ゲート電荷量(Qg)に起因する損失 である。MOSFET をスイッチングするときに、電源 IC のゲートドライバが MOSFET の寄生容量にチャージするために生じる。ゲートチャージ損失の計算式を式 (4.3)、式(4.4)に示す。 𝑉 :MOS 駆動回路の電源電圧[V] 𝑄𝑔:MOS の全ゲート電荷量[nC] fSW:スイッチング周波数[Hz]PONH , PONL: MOSFET オン時のオン抵抗による導通損失
ハイサイド及びローサイド MOSFET のオン時の抵抗により生じる損失であり、伝導 損失とも呼ばれる。MOSFET オン時のオン抵抗による導通損失の計算式を式(4.5)、式 (4.6)に示す。 𝑃 = 𝑅 × 𝐼 × 𝑉 𝑉 (4.5) 𝑃 = 𝑅 × 𝐼 × 1 − 𝑉 𝑉 (4.6) 𝑃 = 𝑄𝑔 ( )× 𝑉 × 𝑓 (4.3) 𝑃 = 𝑄𝑔 ( )× 𝑉 × 𝑓 (4.4)
21
RONH, RONL:ハイサイド及びローサイド MOSFET のオン抵抗
Io:出力電流 Vo:出力電圧 PSWH:スイッチング損失 スイッチング損失は MOSFET のスイッチングに伴う損失である。同期整流の降圧 型 DC-DC コンバータの同期スイッチは、VIN と GND の電圧を遷移することでスイ ッチングしており、この遷移時間の電力にスイッチング周波数をかけた値がスイッチ ング損失となる。スイッチング損失の計算式を式(4.7)に示す。 𝑃 = 0.5 × 𝑉 × 𝐼 × (𝑡 + 𝑡 ) × 𝑓 (4.7) Pdead_time:デッドタイム損失 MOSFET のスイッチにおいて両サイドのスイッチがオンしてしまうと VIN と GND を短絡したのとほぼ同じ状態になる。その状態では、貫通電流やスルー電流と呼ばれる 大電流がスイッチに流れるため、破損の恐れがある。これを避けるため、両サイドのス イッチが同時にオフする期間を設ける。この期間のことをデッドタイムといいデッドタ イム中に MOSFET のボディーダイオードの順方向電圧と負荷電流で発生する損失のこ とをデッドタイム損失という。デッドタイム損失の計算式を式(4.8)に示す。 PCOIL:インダクタの DCR による導通損失 インダクタの直流抵抗(DCR)は、巻線の抵抗成分であり、インダクタを流れる電 流と DCR によって損失が発生する。インダクタの DCR による導通損失の計算式を式 (4.9)に示す。 𝑡 ::スイッチ電圧の立ちあがり時間 𝑡 :スイッチ電圧の立ち下がり時間 𝑃 _ = 2 × 𝑉 × 𝐼 × 𝑡 _ × 𝑓 (4.8) 𝑡 _ :デッドタイム時間 𝑉 :ローサイド MOS ボディーダイオード順方向電圧
22
𝑃 = 𝑅 × 𝐼 (4.9) RDC:インダクタの DCR これらをもとに、定常時における降圧型 DC-DC コンバータの損失を導出した。導出 に必要な値はデータシートまたはオシロスコープで測定したものを用いた。損失をまと めたもとを表 4.2 に示す。また、入力電力から出力電力を引くことにより求めた損失 (𝑃 )と比較したものを表 4.3 に示す。2つの方式により算出した値の誤差要因として、 各損失をデータシートの typical 値で導出しているため、ばらつき方によって実際の値 と異なってしまうことや、測定時の温度条件やオシロスコープの精度によって誤差が生 じることがあげられる。 表 4.2:降圧型 DC-DC コンバータにおける損失 表 4.3:異なる導出方法による損失の比較23
実行結果
5.1 シミュレーション結果
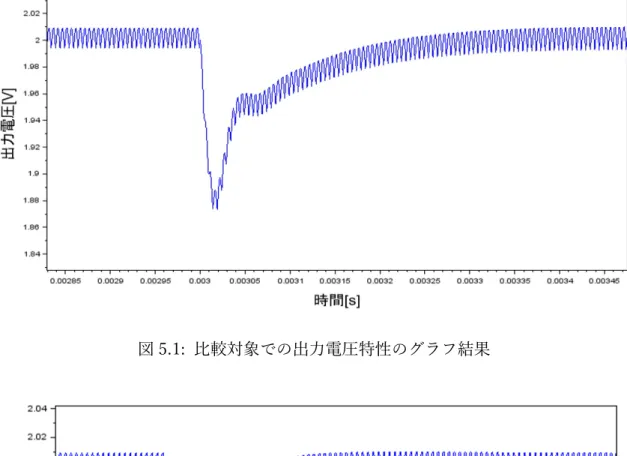
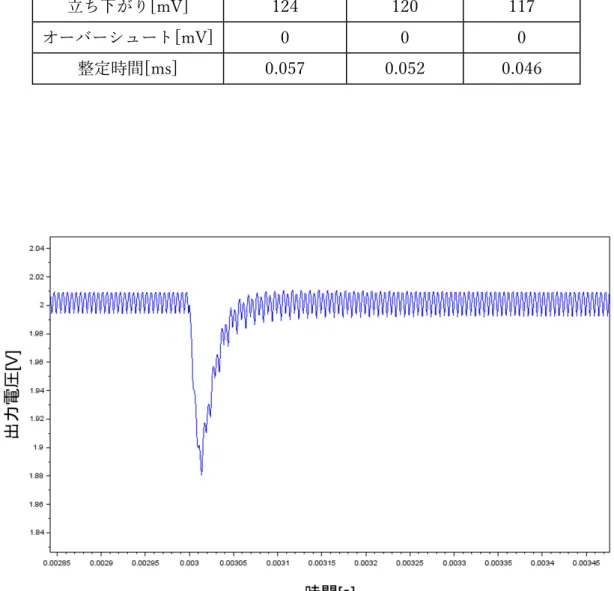
自動設計するにあたり、分散型遺伝的アルゴリズムは表 3.1 に示した条件で適用した。 まず、比較対象である Texas Instruments 社が提供しているデジタルフィルタと同じ次 元である 2pole-2zero IIR フィルタにおいて自動設計を行った。比較対象のデジタルフ ィルタの伝達関数と自動設計したデジタルフィルタの伝達関数をそれぞれ式(5.1) 、式 (5.2) に示す。 𝑈(𝑧) 𝐸(𝑧)= 4.1703226660 − 5.9120992707𝑧 + 1.9495912223𝑧 1 − 0.8285977𝑧 − 0.1714023𝑧 (5.1) 𝑈(𝑧) 𝐸(𝑧)= 7.4421595762 − 11.3213033821𝑧 + 4.2151682301𝑧 1 − 0.3532772416𝑧 − 0.6467227583𝑧 (5.2) 比較対象の出力電圧特性と自動設計したデジタルフィルタでの出力電圧特性による各 評価項目の値とその時の評価値をそれぞれ表 5.1、表 5.2 に示し、比較したものを表 5.3 に示した。また、比較対象の出力電圧特性を図 5.1、自動設計結果の出力電圧特性を図 5.2 に示す。 表とグラフの結果から比較対象での特性に比べ自動設計したデジタルフ ィルタの特性の方が立ち下がり特性と整定時間の項目で優位性が確認できた。24
表 5.1: 比較対象(Texas Instruments 社)での出力電圧特性 各特性 評価値 立ち下がり[mV] 126 29.7 オーバーシュート[mV] 0 100 整定時間[ms] 0.0147 78.6 計 317 表 5.2: 自動設計結果(2pole2zero)の出力電圧特性 各特性 評価値 立ち下がり[mV] 124 30.9 オーバーシュート[mV] 0 100 整定時間[ms] 0.057 88.6 計 339 表 5.3: 比較対象と自動設計結果(2pole2zero)の比較 比較対象 自動設計 改善量 立ち下がり[mV] 126 124 2 オーバーシュート[mV] 0 0 0 整定時間[ms] 0.147 0.057 0.09025
図 5.1: 比較対象での出力電圧特性のグラフ結果
図 5.2:自動設計結果(2pole2zero)での出力電圧特性のグラフ結果
次に、設計がより困難となる 3pole3zero と 4pole4zero においても自動設計を行った。 3pole3zero で自動設計したデジタルフィルタの伝達関数と 4pole4zero で自動設計し
26
たデジタルフィルタの伝達関数をそれぞれ式(5.3) 、式(5.4) に示す。 𝑈(𝑧) 𝐸(𝑧)= 13.247088 − 20.547174𝑧 + 9.9215819 − 1.300418𝑧 1 + 0.1192919𝑧 − 0.8252985𝑧 − 0.2939934𝑧 (5.3) 𝑈(𝑧) 𝐸(𝑧)= 16.505019 − 28.738316𝑧 + 18.861183 − 5.7746955𝑧 + 0.6077975𝑧 1 − 0.0972635𝑧 − 0.6346286𝑧 − 0.2415953𝑧 − 0.0263789𝑧 (5.4) 3pole3zero で自動設計したデジタルフィルタの出力電圧特性と 4pole4zero で自動設 計したデジタルフィルタの出力電圧特性による各評価項目の値とその時の評価値をそ れぞれ表 5.3、表 5.4 に示し、2pole2zero から 4pole4zero までの各評価項目の値を比較 したものを表 5.5 に示した。また、3pole3zero の出力電圧特性を図 5.3、4pole4zero の 出力電圧特性を図 5.4 に示す。表と図の結果から 2pole2zero から 4pole4zero へと次元 が向上していくにつれて立ち下がり特性と整定時間が向上していくことが確認できた。 表 5.3: 3pole3zero での出力電圧特性 各特性 評価値 立ち下がり[mV] 120 33.6 オーバーシュート[mV] 0 100 整定時間[ms] 0.052 89.6 計 346 表 5.4: 4pole4zero の出力電圧特性 各特性 評価値 立ち下がり[mV] 117 34.7 オーバーシュート[mV] 0 100 整定時間[ms] 0.046 91 計 35127
表 5.5: 2pole2zero から 4pole4zero の自動設計結果の比較 2pole2zero 3pole3zero 4ole4zero
立ち下がり[mV] 124 120 117
オーバーシュート[mV] 0 0 0
整定時間[ms] 0.057 0.052 0.046
28
図 5.4: 4pole4zero の出力電圧特性のグラフ結果5.2 実測結果
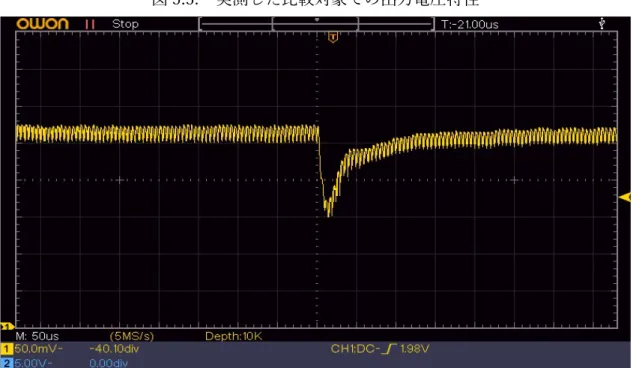
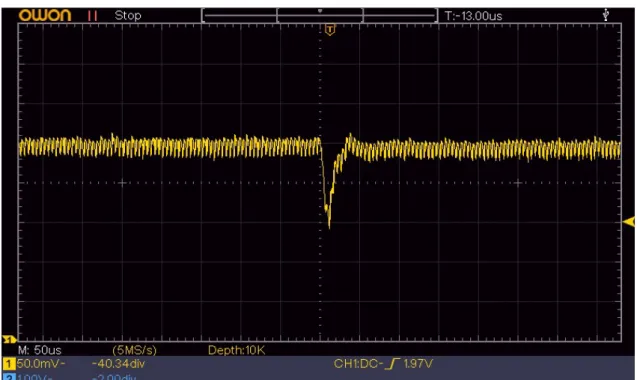
実測は図 4.2 のコンバータの出力電圧 Vo をオシロスコープで 測定することで行っ た。 比較対象での出力電圧特性を図 5.5、自動設計した 2pole2zero デジタルフィルタ での出力電圧特性を図 5.6 に示す。また、出力電圧特性による各評価項目の値を表 5.6 に示す。 表と図より、実測においても比較対象での特性に比べ自動設計したデジタル フィルタの特性の方に優位性を確認した。29
図 5.5: 実測した比較対象での出力電圧特性
30
表 5.6 実測における比較対象と自動設計結果(2pole2zero)の比較 次に、3pole3zero、4pole4zero で自動設計したデジタルフィルタの実測結果を図 5.7、 図 5.8 に示す。また、2pole2zero から 4pole4zero までの出力電圧特性における各評価 項目の値を比較したものを表 5.7 に示した。表と図の結果から実測においても 2pole2zero から 4pole4zero へと次元が向上していくにつれて立ち下がり特性と整定時 間が向上していくことが確認できた。ただし、4pole4zero において、負荷急変後の整定 値が定常値よりも下がってしまう問題が起きた。 図 5.7: 実測した 3pole3zero での出力電圧特性 比較対象 自動設計 改善量 立ち下がり[mV] 126 124 2 オーバーシュート[mV] 0 0 0 整定時間[ms] 0.144 0.060 0.08431
図 5.8: 実測した 4pole4zero での出力電圧特性
表 5.7: 実測した 2pole2zero から 4pole4zero の自動設計結果の比較 2pole2zero 3pole3zero 4ole4zero
立ち下がり[mV] 124 122 117
オーバーシュート[mV] 0 0 0
32
第 6 章 まとめと今後の課題
5.1
まとめ
本論文では、分散型遺伝的アルゴリズムを用いて良好な電源特性をもつデジタルフィ ルタを自動設計する手法を提案した。良好な電源特性だと位置づける評価方法として、 Texas Instruments 社のデジタル制御電源に提供されているデジタルフィルタの特性と 自動設計したデジタルフィルタの特性をシミュレーションと実測の両方で比較した。そ の結果、シミュレーションと実測の両方で自動設計結果の優位性を確認できた。 また、Texas Instruments 社のデジタル電源に実装されているデジタルフィルタより も高次な次元である 3pole3zero、4pole4zero デジタルフィルタにおいても自動設計を 行った。その結果、シミュレーションと実測の両方で次元が上がればあがるほど電源特 性が向上していくことを確認できた。5.2
今後の課題
今後の課題として 2 つの内容が挙げられる。1 つ目は、シミュレーションと実機の 整合性を合わせることだ。実機における損失を計算し、シミュレーション環境を調整 したことでかなり誤差は少なくなった。しかし、4pole4zero での実機特性を見てみる と負荷急変後の整定値が定常値よりわずかに低下している。これは、負荷急変応答特 性をよりよくするためにギリギリで設計しているため安定性が下がっているために起 きてしまった。一般的に安定性と応答性はトレードオフの関係にあり両者を同時に向 上するのは難しいが、用途に合わせて十分な安定性を確保した個体だけを最適化アル ゴリズムに適用することで応答性を向上しつつ確実な安定性を確保する必要がある。 2つ目は、デジタルフィルタの自由度を増やすことである。本論文では、自動設計す る対象を 2 次から4次 IIR フィルタで行ったが、それより高次な IIR フィルタおよび IIR フィルタの型にとらわれないで自動設計することで更なる高性能化が望まれる。33
謝辞
本研究を進めるにあたって、ご指導を頂いた所属研究室の髙井伸和准教授、サンケ ン電気株式会社の山崎尊永氏、下川宗一郎氏、竹本義孝氏、岩渕昭夫氏に感謝の意を 表します。また、有益な助言を頂いた同研究分野の永嶋宣彦氏、蓮沼尚也氏、同研究 室の猿田将大氏、今野哲史氏、齋藤彰寛氏、中島望夢氏、加藤博己氏、酒向諒氏に心 より感謝を申し上げます。また、論文審査をして頂きました橋本誠司教授、栗田伸幸 准教授に心より感謝申し上げます。34
参考文献
[1] 永嶋 宣彦, 髙井 伸和, 新井 信吾, ''デジタル制御電源のデジタルフィルタの自動設計及
び実機評価, '' 電気学会 電子回路研究会, ECT-020-045, Web 開催 (2020 年 6 月) .
[2] S. Arai、 N. Takai、 Y. Kubo、 A. Iwabuchi、 S. Shimokawa、 Y. Takemoto、 T. Yamazaki、 ''Automatic design of higher-order transfer function of the control circuit of the step-down converter、 '' 電気学会 電子・情報・システム部門大会、 琉球大学、 Sep.2019.
[3] Y. Kubo、 N. Takai、 M. Fukuda、 T. Matsuba、 T. Yamazaki、 S. Shimokawa、 A. Iwabuchi、 ''Regression Analysis of Transfer Function of an Analog Filter from Circuit Characteristics Using Deep Learning、 '' 9th International Conference on Advanced Micro-Device Engineering、 P064、 Kiryu、 Japan、 Dec. 2018.
[4] A.J.Forsyth and S.V.Mollov 、 ''Modelling and control of DC-DC converters 、 '' Power Engineering Journal、 Vol. 12、 No. 5、 229-236、 Oct 1998.
[5] Tech Web DC-DC コンバータ まとめ 損失の検討 https://techweb.rohm.co.jp/knowledge/dcdc/dcdc_sr/dcdc_sr02/8206 [6] 久保友助, 髙井伸和, 松場輝樹, 新井信吾, 永嶋宣彦, 山崎尊永, 下川宗一郎, 岩渕昭 夫, ''深層学習を用いた予測システムの構築による電源制御用フィルタ設計の簡易化, '' 第 10 回 電気学会 東京支部 栃木・群馬支所 合同研究発表会, ETG-20-26, pp. 70-73, 群 馬工業高等専門学校 (2020 年 3 月) . [7] 永嶋宣彦, 髙井伸和, 新井信吾, 久保友助, 岩渕照夫, 下川宗一郎, 竹本義孝, 山崎尊 永, ''デジタル制御電源の制御器の自動設計及び実機評価, '' 第 10 回 電気学会 東京支部 栃 木 ・ 群 馬 支 所 合同研究発 表会, ETG-20-66, pp. 195-198, 群 馬 工 業高等 専門学 校 (2020 年 3 月) . [8] 三木 夏子, 新井 貴之, 浅石 恒洋, 築地 伸和, 孫 逸菲, 小堀 康功, 髙井 伸和, 小林 春夫, ''EMI ノイズ拡散スイッチング電源の出力リップル低減方式, '' 電気学会 電子回路 研究会, ECT-18-026, 日立製作所 (2018 年 3 月) . [9] 新井 貴之, 三木 夏子, 浅石 恒洋, 孫 逸菲, 築地 伸和, 小堀 康功, akai, 小林 春 夫, ''EMI ノイズ低減方式におけるリプル補正スイッチング電源の検討, '' 第8 回 電気学 会 東京支部 栃木・群馬支所 合同研究発表会, ETG-18-80, pp. 248-251, 群馬大 学 (2018 年 3 月) . [10] 吉澤 慧, 髙井 伸和, 大河内 一登, ''回路トポロジーの決定手法にゲーム木探索を適用し た演算増幅器の自動設計, '' 電気学会 電子回路研究会, ECT-18-038, 日立製作所 (2018 年 3 月)
35
学会成果
(1)
S. Arai、 N. Takai、 Y. Kubo、 A. Iwabuchi、 S. Shimokawa、 Y. Takemoto、 T.Yamazaki、 ''Automatic design of higher-order transfer function of the control circuit of the
step-down converter、 '' 電気学会 電子・情報・システム部門大会、 琉球大学、 Sep.2019 (2) 新井 信吾, 髙井 伸和, 久保 友助, 岩渕 照夫, 下川 宗一郎, 竹本 義孝, 山崎 尊 永, ''優良な電源特性を有する制御器伝達関数の自動設計, '' 第 9 回 電気学会 東京支 部 栃木・群馬支所 合同研究発表会, ETG-19-19, pp. 50-53, 小山工業高等専門学 校 (2019 年 3 月) . (3) 永嶋 宣彦, 髙井 伸和, 新井 信吾, ''デジタル制御電源のデジタルフィルタの自動設 計及び実機評価, '' 電気学会 電子回路研究会, ECT-020-045, Web 開催 (2020 年 6 月) . (4) 永嶋宣彦, 髙井伸和, 新井信吾, 久保友助, 岩渕照夫, 下川宗一郎, 竹本義孝, 山崎 尊永, ''デジタル制御電源の制御器の自動設計及び実機評価, '' 第 10 回 電気学会 東 京支部 栃木・群馬支所 合同研究発表会, ETG-20-66, pp. 195-198, 群馬工業高等 専門学校 (2020 年 3 月) . (5) 久保友助, 髙井伸和, 松場輝樹, 新井信吾, 永嶋宣彦, 山崎尊永, 下川宗一郎, 岩渕 昭夫, ''深層学習を用いた予測システムの構築による電源制御用フィルタ設計の簡易 化, '' 第 10 回 電気学会 東京支部 栃木・群馬支所 合同研究発表会, ETG-20-26, pp. 70-73, 群馬工業高等専門学校 (2020 年 3 月) .
![WEB用[ ]国内用総合マニュアル_簡易版](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)