Partial differential equations
Takehito Yokoyama
Department of Physics, Tokyo Institute of Technology, 2-12-1 Ookayama, Meguro-ku, Tokyo 152-8551, Japan
(Dated: January 30, 2014)
PARTIAL DIFFERENTIAL EQUATIONS
Types of partial differential equations are summarized as follows.
∂ 2 u
∂t 2 = c 2 ∂ 2 u
∂x 2 Wave equation (1)
∂ 2 u
∂t 2 = c 2 ∂ 2 u
∂x 2 − k ∂u
∂t Wave equation with friction (2)
∂ 2 u
∂t 2 = c 2 ∂ 2 u
∂x 2 − k ∂u
∂t − hu Transmission line equation (3)
∂ 2 u
∂t 2 = − b 2 ∂ 4 u
∂x 4 Beam equation. (4)
∂u
∂t = D ∂ 2 u
∂x 2 Diffusion equation (5)
∂u
∂t = D ∂ 2 u
∂x 2 − ku Diffusion equation with lateral concentraton loss (6)
∂u
∂t = D ∂ 2 u
∂x 2 − v ∂u
∂x Diffusion − convection equation (7)
∂u
∂t = D ∂ 2 u
∂x 2 − u ∂u
∂x Burgers equation. (8)
Note
Some notes on the partial differential equations listed above are presented. Some transformations can simplify the equations:
In the transmission line equation, this transformation eliminates the u t term
u = e
−kt/2 w. (9)
In the diffusion equation with lateral concentraton loss, this transformation reduces it to the simple diffusion equation
u = e
−kt w. (10)
In the diffusion-convection equation, this transformation reduces it to the simple diffusion equation
u = e
−v[x
−vt/2]/2D w. (11)
The solution of the Burgers equation can be constructed by the following transformation where ψ obeys the simple diffusion equation :
u = − 2D ∂
∂x ln ψ. (12)
This transformation is called the Hopf-Cole transformation. The solution of the initial value problem of the Burgers equation thus reads [u(x, 0) = f (x)]
u = − 2D ∂
∂x ln 1
2 √ πDt
Z
∞−∞
exp
− (x − y) 2
4Dt + 1
2D Z y
0
f (z)dz
dy
. (13)
2
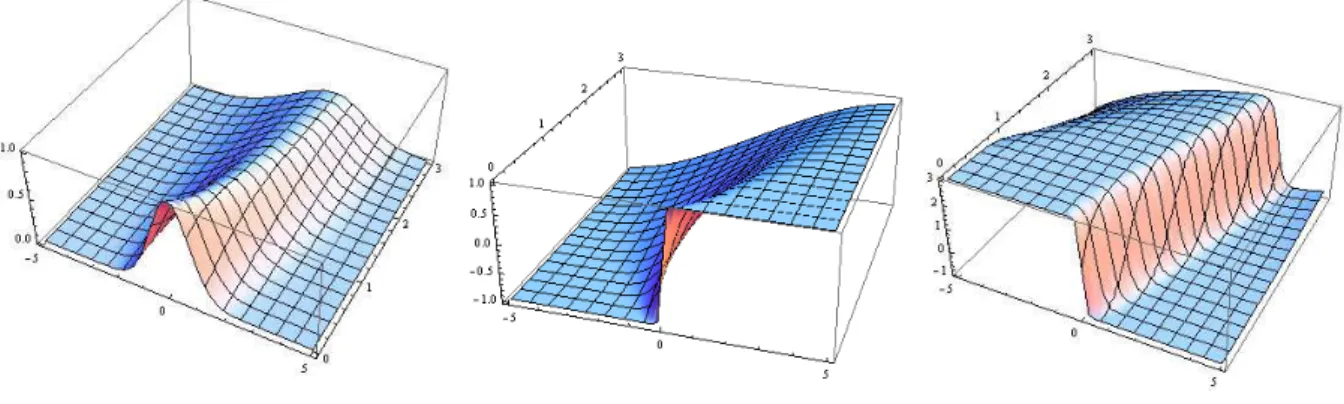
FIG. 1: Plots of u(x, t). Left: u(x, 0) = e
−x2. Middle: u(x, 0) = tanh(10x). Right: u(x, 0) = 1 − 2 tanh(10x).
Typical solutions of the Burgers equation are shown in Fig. 1. Interestingly, we see a shock wave solution in the right panel. Intuitively, this is because the velocity of the wave is given by u. Thus, the larger the magnitude of u, the faster the wave travels. This interpretation is consistent with Fig. 1.
Derivation of the beam equation
Consider a beam along x-axis. We have two assumptions: No cross-sectional deformation:
ε yy = ε zz = ε yz = 0. (14)
and Bernoulli-Euler assumption (Bernoulli-Euler Beam):
ε xy = ε xz = 0. (15)
Here, the strain tensor ε ij is defined as
ε ij = 1 2
∂u i
∂x j
+ ∂u j
∂x i
. (16)
u i is the displacement vector. The diagonal elements represent extensional strain while the off-diagonal elements denote shearing strain.
Let u(x) a displacement along the x-axis, w(x) a deflection along y-axis, and θ(x)( ≪ 1) a slope of the beam. Then, we have
u x = u − y sin θ ≃ u − yθ, u y = w + y(1 − cos θ) ≃ w. (17) Since ε xy = 0, we obtain
θ = dw
dx . (18)
Therefore, we arrive at
ε xx = du
dx − y d 2 w
dx 2 . (19)
According to the Hooke’s law, we obtain the normal stress of the beam:
σ xx = Eε xx = E du
dx − y d 2 w dx 2
(20) where E is the Young’s modulus. The bending moment of the beam M can be calculated as
M = Z
A
yσ xx dA = EJ y
du
dx − EI d 2 w
dx 2 . (21)
3 Here, dA is the infinitesimal section area. J y and I denote the first sectional moment and the sectional moment of inertia, respectively:
J y = Z
A
ydA, I = Z
A
y 2 dA. (22)
If the x-axis goes through a centroid of the section, we have J y = 0.
Now, consider the equation of motion of the beam:
ρA ∂ 2 w
∂t 2 = ∂V
∂x + p (23)
where ρ is the density, p is the external force, V is the shear force. The equilibrium equation of moments reads
∂M
∂x = V. (24)
Thus, we finally obtain the beam equation:
ρA ∂ 2 w
∂t 2 = − EI ∂ 4 w
∂x 4 + p. (25)
In the presence of viscous drag, the normal stress of the beam is given by σ xx = Eyκ + ηy ∂κ
∂t . (26)
Here, η is the viscosity coefficient, and κ represents the curvature of the beam, κ = − ∂ ∂x
2w
2. The equation of motion of the beam then becomes
ρA ∂ 2 w
∂t 2 = − EI ∂ 4 w
∂x 4 + − ηI ∂ 5 w
∂t∂x 4 + p. (27)
Alternatively, the kinetic and potential energies of the beam, K and U , are respectively given by K = 1
2 Z
ρA ∂w
∂t 2
dx, U = 1 2
Z
σ xx ε xx dAdx = 1 2
Z
M κdx = 1 2
Z EI
∂ 2 w
∂x 2 2
dx. (28)
Variation of the action with respect to w also gives the beam equation.
OTHER PARTIAL DIFFERENTIAL EQUATIONS
We know the solutions of ∂u ∂t = L[u] for L[u] = u x and u xx . As a next step, consider the case of L[u] = u xxx :
∂u
∂t = ∂ 3 u
∂x 3 . (29)
The solution for u(x, 0) = f (x) can be obtained by Fourier transforming the equation:
u = Z
∞−∞
F (x − y, t)f (y)dy, (30) F (x, t) = 1
2π Z
∞−∞
exp ik 3 t − ikx
dk = (3t)
−1/3 Ai
− x (3t) 1/3
. (31)
Here, Ai(x) is the Airy function defined as Ai(x) = 1
2π Z
∞−∞