社団法人 電子情報通信学会
THE INSTITUTE OF ELECTRONICS,
INFORMATION AND COMMUNICATION ENGINEERS
信学技報
TECHNICAL REPORT OF IEICE.
非対称に結合されたカオスシステムにおける パラメータ誤差と同期現象の関係について
細川 康輝
†
西尾 芳文††
†
四国大学経営情報学部 〒771-1192
徳島県徳島市応神町古川††
徳島大学工学部 〒770–8506
徳島県徳島市南常三島町2–1 E-mail: † [email protected], †† [email protected]
あらまし カオス同期現象では,誤差によって同期状態と非同期状態がランダムに遷移する現象が見られる.この現 象と誤差の関係について,2種類のカオス発生要素からなる完全結合系での調査を行い,一方のカオス発生要素の誤 差を大きくした場合に,もう一方の同期割合が高くなる場合があることを確認している.本研究では,複数の系で見 られたこの現象の共通点と差異について考察する.
キーワード カオス,結合系,カオス回路,カオスマップ
Relationship Between Parameter Mismatches and Synchronization Phenomena on Asymmetrically Coupled Chaotic Systems
Yasuteru HOSOKAWA † and Yoshifumi NISHIO ††
† Faculty of Management and Information Science, Shikoku University Furukawa, Ohjin, Tokushima, 771–1192 Japan
†† Faculty of Engineering, Tokushima University 2–1, Minami–Josanjima, Tokushima, 770–8506 Japan
E-mail: † [email protected], †† [email protected]
Abstract A switching phenomenon between a synchronous state and a asynchronous state is observed in a coupled chaotic system including parameter mismatches. A relationship between the phenomenon and parameter mismatches has investigated in the case of globally coupled systems which consist of two kinds of chaotic systems. As a result, it is confirmed that the synchronous rate of one kinds of the chaotic system is increased by increasing parameter mismatches of the other. This phenomenon can be obteined in some systems whose elements are applied to some kinds of chaotic generators. In this study, common and difference points between systems are investigated.
Key words chaos, coupling system, chaotic circuit, chaotic map
1.
は じ め にカオス現象が自然界において見られることが明らかとなり,
さまざまな分野で研究が行われている.その中でも,カオス回 路の結合システムでは,カオス同期現象
[1]
をはじめ,多様な 現象が見られるため,工学的応用のみならず,自然現象,脳神 経細胞の処理との関連を明らかにする目的で,精力的に研究さ れている.カオスの大規模結合系では,非常に簡単な差分法定 式の組み合わせで,さまざまな興味深い現象が見られる金子のCML
・GCM [2]
が知られており,それら現象と自然界の対応 についても多くの考察がなされている.さらにカオス回路を用 いた結合系でも,興味深いさまざまな現象が確認され,応用も考えられている
[3]- [5]
.以上のことから大規模結合カオスシス テムの研究は重要であると考えられる.一方,現実世界のネットワークには,
2
つの要素から構成さ れているものも多数存在する.たとえば,人間社会ネットワー クにおける男女,集積回路における半導体のP
型N
型,多く の動物の雌雄の群れ,大気の高気圧,低気圧などが挙げられる.これらの多くでは,
2
種類の要素が互いに影響することで見ら れる現象も多々あると考えられる.そして,実世界では完全に 同じものはありえず,同一とみなされているものにも必ず差が 存在する.さらに,2
つの要素と大別できる系においても,各々 のグループでの個体差はあり,系全体に影響を与えていると考 えられる.図
1
システムモデルFig. 1 System model.
以上の点から,
2
種類のカオス発生要素の完全結合系に見ら れる同期現象と誤差の関係について調査を行い,以下のような 現象を確認した[6]- [8]
.カオス同期現象では,2
つの系の誤差 によって,同期状態と非同期状態がランダムに切り替わる現象 が見られ,誤差が大きいほど,非同期状態の割合が大きくなる.この現象が
2
種類のカオス発生要素を用いた場合,誤差が大き くなるにも関わらず,非同期状態の割合が低下する現象である.本研究では,この現象をいくつかの系について調査・比較 する.
2.
システムモデル2. 1
システムモデル図
1
に研究対象とした2
種類のカオス発生要素の完全結合系 のモデルを示す.すべてのカオス発生要素を相互に結合したも ので,要素は大きく2
種類に分けられる.さらに,同種類の要 素においても誤差を含ませ,その誤差が系全体に与える影響を 調査する.本研究では,以下に示す複数のモデルについて調査 を行った.2. 2
モ デ ル1
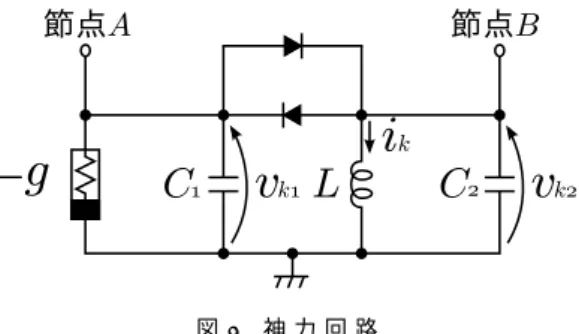
図
2
で示される神力回路[9]
は,3
次元自励振動回路で,負 性抵抗の値の変化によって,周期倍分岐を経てカオスへ至る回 路である.負性抵抗,キャパシタ2
つ,インダクタ1
つ,ダイ オード2
つで構成されている.結合する節点としては,図の節 点A
,B2
つが考えられる.本モデルでは,節点A
,B
のいず れかを結合点とすることで,2
種類の要素とした.本モデルの 正規化した回路方程式は,以下の通りである.Subsystem A (1 < = k < = m):
˙
x
k= αβx
k− αγf (x
k− y
k) +αδ{
m+n
∑
i=n+1
x
i+
∑
n j=1y
j− (m + n)x
k},
˙
y
k= γf(x
k− y
k) − z
k,
˙
z
k= (1 + p
k)y
k.
(1)
図
2
神 力 回 路Fig. 2 Shinriki’s circuit.
Subsystem B (m + 1 < = k < = m + n):
˙
x
k= αβx
k− αγf (x
k− y
k),
˙
y
k= δ{
m+n
∑
i=n+1
x
i+
∑
n j=1y
j− (m + n)y
k} + γf (x
k− y
k) − z
k,
˙
z
k= (1 + q
k)y
k,
(2)
ここで,
f(x) = x + (|x − 1| − |x + 1|)
2 .
である.
x
kはv
k1,y
kはv
k2,z
kはi
kにそれぞれ対応する 変数である.非線型関数f(x)
は,ダイオードの特性に対応す る関数である.2. 3
モ デ ル2
本モデルでは,モデル
1
と同様に図2
の回路を用いるが,節 点A
のみで結合する.2
種類の要素としては,負性抵抗のパラ メータを異なる値にすることで実現した.本モデルの正規化し た回路方程式は以下の通りである.Subsystem A (1 < = k < = m):
˙
x
k= αβx
k− αγf (x
k− y
k)
+αδ {
m+n∑
i=1
x
i− (m + n)x
k} ,
˙
y
k= −z
k+ γf(x
k− y
k),
˙
z
k= (1 + p
k)y
k,
(3)
Subsystem B (m + 1 < = k < = m + n):
˙
x
k= εβx
k− εγf (x
k− y
k)
+εδ {
m+n∑
i=1
x
i− (m + n)x
k} ,
˙
y
k= ζ {− z
k+ γf(x
k− y
k) } ,
˙
z
k= η(1 + q
k)y
k,
(4)
ここで,
図
3
稲 葉 回 路Fig. 3 Inaba’s circuit.
f(x) = x + ( | x − 1 | − | x + 1 | )
2 .
である.
x
kはv
k1,y
kはv
k2,z
kはi
kにそれぞれ対応する 変数である.非線型関数f (x)
は,ダイオードの特性に対応す る関数である.2. 4
モ デ ル3
図
3
で示される稲葉回路[10]
は,神力回路と同じ3
次元自励 振動回路で,負性抵抗の値の変化によって周期倍分岐を経てカ オスへ至る回路である.負性抵抗1
つ,インダクタ2
つ,キャ パシタ1
つ,ダイオード1
つで構成されている.神力回路とは カオスアトラクタの形状が大きく異なっているため,比較対象 としてこの回路を用いた.本モデルの正規化された回路方程式 は,以下の通りである.Subsystem A (1 < = k < = m):
˙
x
k= (1 + p
k)z
k˙
y
k= α { z
k− f(y
k) } ,
˙
z
k= −x
k− y
k+ βz
k+δ {
m+n
∑
i=1
z
i− (m + n)z
k, }
(5)
Subsystem B (m + 1 < = k < = m + n):
˙
x
k= (1 + q
k)z
k˙
y
k= ζ { z
k− f (y
k) } ,
˙
z
k= η[ − x
k− y
k+ βθz
k+δ {
m+n
∑
i=1
z
i− (m + n)z
k, } ]
(6)
ここで,
f(y
k) = γy
k+ 1 − |γy
k− 1|
2 .
である.
x
kは,i
k1,y
kは,i
k2,z
kは,v
kにそれぞれ対応 する変数である.非線型関数f(x)
は,ダイオードの特性に対 応する関数である.2. 5
モ デ ル4
本モデルでは,カオス回路以外の結合要素としてロジスティッ クマップを要素とし,モデル
2
,3
と同様に2
つの異なるパラ メータを用いることで,2
種類の要素とした.この系は,以下の式で表される金子によって提案された
GCM [2]
をもとにモデルを導出する.x
n+1(i) = (1 − ε)f(x
n(i)) + ε N
∑
N j=1f(x
n(j)) (7)
ここで,
n
は,計算回数,i
は要素の番号,f(x)
はカオスマップの 関数である.本モデルでは,ロジスティックマップf(x) = 1−ax
2 を適用する.2
つの要素とするために,2
つのパラメータを用 いる.すなわち,関数f(x)
は,以下の通りになる.Subsystem A ( 1 < = k < = p):
f
A(x
n(k)) = 1 − (1 + p
kk)a
1x
n(k)
2(8) Subsystem B ( p + 1 < = k < = p + q):
f
B(x
n(k)) = 1 − { 1 + q
k(k − p) } a
2x
n(k)
2(9)
ここで,n
は計算回数,k
は要素の番号,a
1,a
2はロジスティッ クマップのパラメータ,p
とq
は,Subsystem A
とSubsystem B
の数,p
kとq
kは,Subsystem
それぞれのパラメータ誤差f(x)
はカオスマップの関数である.2. 6
モ デ ル5
本研究の調査対象である図
1
のシステムモデルとは異なるが,モデル
1
の節点B
で結合された回路をvan der Pol
発振器に置 き換えたものが本モデルである.本モデルの正規化された回路 方程式は,以下の通りである.Subsystem A(1 < = k < = m):
˙
x
k= αβx
k− αγf
10(x
k− y
k)
+αδ {
m+n∑
i=1
x
i− (m + n)x
k} ,
˙
y
k= −z
k+ γf
10(x
k− y
k),
˙
z
k= (1 + p
k)y
k,
(10)
ここで,
f
10(x) = x + (|x − 1| − |x + 1|)
2 .
である.
Subsystem B(m + 1 < = k < = m + n):
˙
x
k= εζf
20(x
k) − εz
k+δε {
m+n∑
i=1
x
i− (m + n)x
k} ,
˙
z
k= (1 + q
k)ηx
k,
(11)
ここで
,
f
20(x) = x − | x + 1 | + | x − 1 | .
x
1− x
2x
2− x
3x
3− x
4x
4− x
5図
4
モデル1
のシミュレーション例Fig. 4 One of the simulation results of Model 1.
である.
x
kはv
k,y
kはv
k,z
kはv
kにそれぞれ対応する変 数である.非線型関数f
1(x)
はダイオードの特性,非線型関数f
2(x)
は非線形負性抵抗の特性に対応するものである.3.
シミュレーション3. 1
シミュレーション設定各モデルの要素の数は
5
とし,Subsystem A
の数を2
,Sub- system B
の数を3
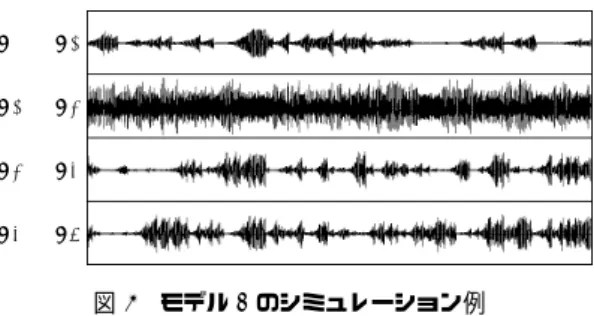
とした.図4
は,モデル1
のシミュレーショ ンの一例である.この図は,例えば1
列目のx
1− x
2のように2
つの要素間の差を表示したもので,振幅が0
の場合は同期し ていることを表している.このように本研究で注目している同 期状態と非同期状態がランダムに遷移する現象が見られる.さ らに,この現象はパラメータ誤差の変化によって,同期・非同 期の割合が変化する.このパラメータ誤差の変化と同期・非同 期の割合を調査するため,同期を以下のように定義する.|x
k− x
k−1| < 0.01 (12)
加えて,Subsystem B
の各要素に与えるパラメータ誤差q
kを 変化させるため,以下のようなパラメータ誤差に関する変数Q
を設定する.q
k= Q(k − 1). (13)
すなわち,
Q
の増加はSubsystem B
のパラメータ誤差の増加 を意味する.各モデルについて,パラメータ誤差
Q
における同期割合を,シミュレーションにより求めた.同期割合は,計算
10000000
回中に定義した同期を満たす回数の割合とした.各モデル毎の シミュレーション結果を以下に示す.3. 2
モ デ ル1
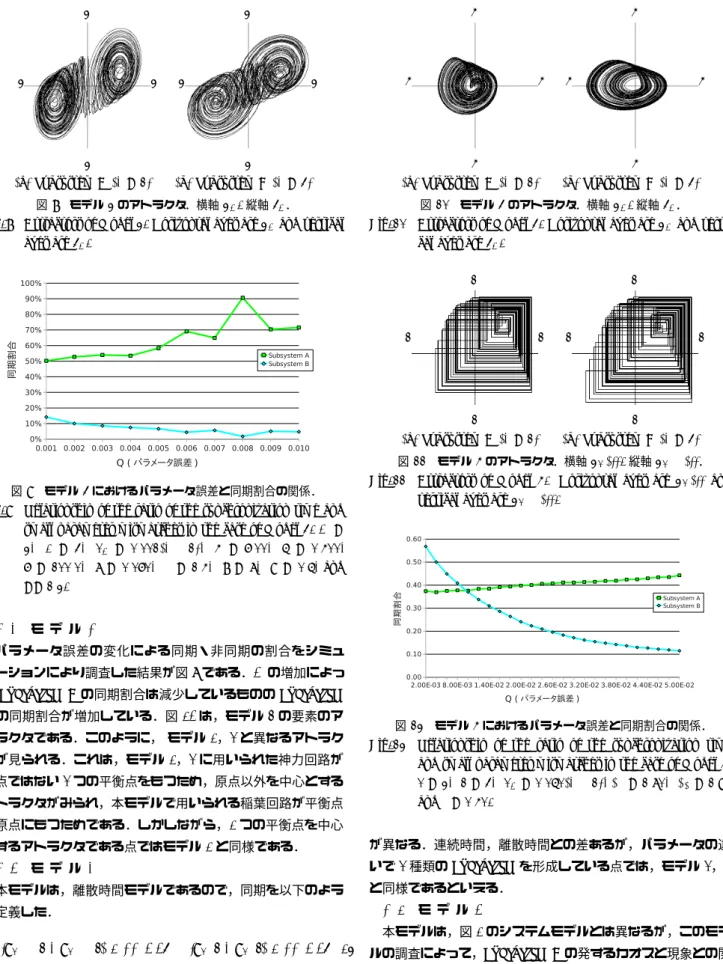
パラメータ誤差の変化による同期・非同期の割合をシミュ レーションにより調査した結果が図
5
である.このとき,Q
の 増加によってSubsystem B
の同期割合は減少しているもののSubsystem A
の同期割合が増加している.図6
は,Q = 0.001
におけるモデル1
の要素のアトラクタである.パラメータに よってダブルスクロール型のアトラクタも見られる回路である が,そのようなパラメータでは現象は確認できず,図6
のよう なアトラクタとなるパラメータにおいて現象が確認できた.3. 3
モ デ ル2
パラメータ誤差の変化による同期・非同期の割合をシミュレー ションにより調査した結果が図
7
である.このとき,モデル1
図
5
モデル1
におけるパラメータ誤差と同期割合の関係.Fig. 5 Relationship of the ratio of the synchronization time and small parameter mismatches in the case of Model 1. m = 2, n = 3, p
k= 0.001(k − 1), α = 0.400, β = 0.500, γ = 20.0 and δ = 0.070
2 2
− 2 2 − 2 2
− 2 − 2
(a) Subsystem A (k = 1) (b) Subsystem B (k = 3)
図6
モデル1
のアトラクタ.横軸x
k.
縦軸z
k.Fig. 6 Attractors of Model 1. Horizontal axes are x
kand vertical
axes are z
k.
図
7
モデル2
におけるパラメータ誤差と同期割合の関係.Fig. 7 Relationship of the ratio of the synchronization time and small parameter mismatches in the case of Model 2. m = 2, n = 3, p
k= 0.001(k − 1), α = 0.600, β = 0.500, γ = 20.0, δ = 0.070, ε = 0.6, ζ = 1.5 and η = 0.5.
と同様に
Q
の増加によってSubsystem B
の同期割合は減少し ているもののSubsystem A
の同期割合が増加している.図8
は,モデル2
の要素のアトラクタである.このように,ダブル スクロール型のアトラクタが見られる.Subsystem A
,B
でパ ラメータを異なる値にしているため,多少アトラクタの形状が 異なっている.2 2
− 2 2 − 2 2
− 2 − 2
(a) Subsystem A (k = 1) (b) Subsystem B (k = 3)
図8
モデル2
のアトラクタ.横軸x
k.
縦軸z
k.Fig. 8 Attractors of Model 2. Horizontal axes are x
kand vertical
axes are z
k.
図
9
モデル3
におけるパラメータ誤差と同期割合の関係.Fig. 9 Relationship of the ratio of the synchronization time and small parameter mismatches in the case of Model 3. m = 2, n = 3, p
k= 0.001(k − 1), α = 6.00, β = 0.400, γ = 100.0, δ = 0.060, ε = 1.4, ζ = 7, η = 0.5, and θ = 1.2.
3. 4
モ デ ル3
パラメータ誤差の変化による同期・非同期の割合をシミュ レーションにより調査した結果が図
9
である.Q
の増加によっ てSubsystem B
の同期割合は減少しているもののSubsystem A
の同期割合が増加している.図10
は,モデル3
の要素のア トラクタである.このように, モデル1
,2
と異なるアトラク タが見られる.これは,モデル1
,2
に用いられた神力回路が 原点ではない2
つの平衡点をもつため,原点以外を中心とする アトラクタがみられ,本モデルで用いられる稲葉回路が平衡点 を原点にもつためである.しかしながら,1
つの平衡点を中心 とするアトラクタである点ではモデル1
と同様である.3. 5
モ デ ル4
本モデルは,離散時間モデルであるので,同期を以下のよう に定義した.
(|x
n−1(i)−x
n−1(i+1)| < 0.05)∩(|x
n(i)−x
n(i+1)| < 0.05)(14)
図
12
は,モデル4
におけるパラメータ誤差と同期割合の 関係を表している.この場合においても,Q
の増加によってSubsystem A
の同期割合の増加が見られる.図11
は,横軸x
n(i)
,縦軸x
n+1(i)
としたマップを表している.パラメータの 値が異なっているため,Subsystem A
とSubsystem B
の形状4 4
− 4 4 − 4 4
− 4 − 4
(a) Subsystem A (k = 1) (b) Subsystem B (k = 3)
図10
モデル3
のアトラクタ.横軸x
k.
縦軸z
k.Fig. 10 Attractors of Model 3. Horizontal axes are x
kand verti-
cal axes are z
k.
1 1
− 1 1 − 1 1
− 1 − 1
(a) Subsystem A (k = 1) (b) Subsystem B (k = 3)
図11
モデル4
のアトラクタ.横軸x
n(i).
縦軸x
n+1(i).
Fig. 11 Attractors of Model 4. Horizontal axes are x
n(i) and vertical axes are x
n+1(i).
図
12
モデル4
におけるパラメータ誤差と同期割合の関係.Fig. 12 Relationship of the ratio of the synchronization time and small parameter mismatches in the case of Model 4.
p = 2, q = 3, p
k= 0.050(k − 1), a
1= 1.70, a
2= 1.98 and ε = 0.40.
が異なる.連続時間,離散時間との差あるが,パラメータの違 いで
2
種類のSubsystem
を形成している点では,モデル2
,3
と同様であるといえる.3. 6
モ デ ル5
本モデルは,図
1
のシステムモデルとは異なるが,このモデ ルの調査によって,Subsystem B
の発するカオスと現象との関 連について考察できる.パラメータ誤差の変化による同期・非同期の割合をシミュ レーションにより調査した結果が図
13
である.このようにQ
の増加によってSubsystem A
の同期割合が増加する結果を得 られたものの,Q
の値は非常に大きい.また,この結果を得る図
13
モデル5
におけるパラメータ誤差と同期割合の関係.Fig. 13 Relationship of the ratio of the synchronization time and small parameter mismatches in the case of Model 5. m = 2, n = 3, p
k= 0.001(k − 1), α = 0.400, β = 0.620, γ = 20.0, δ = 0.080, ε = 0.1, ζ = 0.3, η = 0.2.
2 2
− 2 2 − 2 2
− 2 − 2
(a) Subsystem A (k = 1) (b) Subsystem B (k = 3)
図14
モデル5
のアトラクタ.横軸x
k.
縦軸z
k.Fig. 14 Attractors of Model 5. Horizontal axes are x
kand verti-
cal axes are z
k.
ことは非常に困難で,多くのパラメータの範囲ではこのような 結果を得ることはできなかった.図
14
は,Q = 0.1
でのアト ラクタである.図14(a)
は,図6(a)
と非常に似たアトラクタで あり,カオス状態であることも分かる.図14(b)
は,カオスア トラクタが見られているが,このパラメータにおいてvan der Pol
発振器単体では正弦波発振が見られるので,カオス回路の 影響によるものだと考えられる.また,Q
の増加とともに振幅 自体が大きく減少していくことも確認できた.このため,図13
で得られた結果は,Subsystem B
の振幅の減少が大きく影響し ていると考えられる.3. 7
考 察以上の結果から,以下のような定性的共通点があげられる.
2
つのSubsystem
は互いに同期せず,Subsystem B
の同期割合 が下がれば,Subsystem A
の同期割合が増す.さらに,モデル1
から4
において,各要素が周期解やトーラスの場合では,見ら れない現象であったことから,誤差を含むSubsystem
がカオス 状態で,かつ同期,非同期を遷移する場合に,2
つSubsystem
が互いに同期し得ないのであれば見られる現象だと考えられる.また,アトラクタの形状,平衡点の数が異なっていても見られ る現象であると考えられる.
4.
まとめと今後の課題本研究では,
2
種類のカオス発生要素の完全結合系に見られ る同期現象と誤差の関係について調査を行った.結果として,複数の系において一方の
Subsystem
の誤差を増加した場合に,他方の同期割合が増加することを確認し,この現象が,誤差を
含む
Subsystem
がカオス状態で,かつ同期,非同期を遷移する場合に,
2
つSubsystem
が互いに同期し得ないのであれば見 られる現象だと推測できることを示した.今後の課題としては,今回得た定性的特徴や推測を理論的に 説明することが挙げられる.
文 献