再構成型超解像処理の理論限界に関する検討
8
0
0
全文
(2) 1. まえがき. 超解像処理とは,位置ずれのある複数の低解像度 画像から高解像度画像を推定する処理である.これ までにも,数多くの方法が提案されている [1]-[6]. そのなかでも,再構成型超解像処理と分類される 方法が広く利用されている.ML(maximum likelihood) 法 [2],MAP(maximum a posteriori) 法 [3] や POCS(projection onto convex sets) 法 [4] などが,再 構成型超解像処理として有名である.また,多くの研 究はグレイスケール画像を対象としているが,MAP 法を応用して Bayer 配列の低解像度画像からカラー デモザイキング処理と超解像処理を同時に行う方法 も提案されている [5][6].さらに,再構成型超解像処 理は計算コストが大きいことも知られており,効率 的な計算方法に関する報告もされている [7][8]. 再構成型超解像処理には共通の枠組みが存在する. その共通の枠組みとして,高解像度画像の低解像度 画像に対する倍率をまずはじめに設定しなければな らないことが挙げられる.低解像度画像枚数を増加 させることによって,大きな倍率を設定することが 可能であると予想されるが,低解像度画像枚数を増 加させても倍率の大きさには限界があることが経験 的に知られている. この倍率の限界は,再構成型超解像処理に関して の基本的な性質である.また,低解像度画像枚数を 無限に増加させた場合に,この性質は顕著にあらわ れることが予想される.再構成型超解像処理の基本 的な性質であるにもかかわらず,この分野の研究は 非常に少ない.Elad らは [10],未知数の数と方程式 の数の関係から,倍率と観測画像枚数が満足しなけ れば成らない関係式を示している.これは,単純に 観測画像の総画素数(方程式の数)は高解像度画像 の画素数(未知数の数)より多くなくてはならない ことを示しているにすぎない.Baker らは [11],Box 型 PSF(Point Spread Function) を仮定した場合,2 以上の整数の倍率では,超解像方程式の条件数が無 限大となり,高解像度画像を安定的に推定できない ことを示した.また,Lin らは [12],Baker らと同様 に Box 型 PSF を仮定し,摂動定理を応用することに より,条件数の逆数に対応する指標を定量的に評価 している.このように従来の解析は Box 型 PSF に 関する解析のみである. 一方,Capel は [13],カメラモデルの PSF は Gaussian 型 PSF で近似できることを実験的に示している. Box 型 PSF も,Gaussian 型 PSF も,どちらもカメ ラモデルの PSF の近似でしかない.そのため,どの 近似を利用すべきかといった問題が重要である.し かしながら,従来の研究は,Box 型 PSF に関する解 析のみであるため,異なる PSF 近似を定量的に比較 することはできない. 本研究では,任意の空間不変な PSF,任意の倍率 に対して,超解像方程式の条件数を算出する方法で ある条件数定理を提案し,証明する.条件数は線形連 立方程式の安定性の指標として広く利用されている.. それぞれの PSF 近似の条件数を比較することにより, より良い超解像結果を得るためにはどの PSF 近似が 良いかを判断することができる.さらに,勾配法を 利用した ML 法に関する勾配制限を示す.勾配制限 とは,ML 法の評価関数の勾配は,PSF のパワース ペクトラムにより制限されることを示す.具体的に Box 型 PSF と Gaussian 型 PSF を取り上げ,それぞ れの条件数とパワースペクトラムを計算し,解析を 行う.また,合成画像を利用した実験により,勾配 制限および条件数定理の有効性を確認する.. 超解像の基本方程式. 2. 再構成型超解像処理の基本となる連続系の画像変 換方程式を (1) 式に示す. Z gj (yj ) = bj (yj , x) h(x) dx (1) ここで,添え字 j は j 番目の観測を,yj は観測画像 の座標を,x は高解像度画像の座標を,gj (yj ) は連 続観測画像を,bj (yj , x) は連続の PSF を,h(x) は 連続高解像度画像を,それぞれ表す. 実際に超解像処理が扱う方程式は,(1) 式を離散 化した (2) 式であり,(2) 式を超解像方程式と呼ぶこ とにする.. g. =. Bh. (2). ここで,g は複数の低解像度画像の全ての画素値の ベクトル表現を,h は高解像度画像のベクトル表現 を,B は高解像度画像から低解像度画像への変換を 表す行列を,それぞれ表す. この超解像方程式は,低解像度画像数が無限にあ る場合にも拡張できる.低解像度画像数が無限の場 合の超解像方程式を,超解像の基本方程式と呼ぶこ とにする.超解像の基本方程式は,(2) 式と同様であ るが,g の次元と B の行の次元が無限大である.. 理論解析. 3. 本研究における解析の仮定を明確にした後,超解 像の基本方程式に対する条件数の算出方法(条件数 定理)を導出する.次いで,ML 法における勾配と PSF のパワースペクトルとの関係を勾配制限として 示す.. 3.1. 解析の仮定. 本研究の理論解析は以下の仮定に基づく. 仮定 1 位置ずれは平行移動である. 仮定 2 カメラ PSF は空間不変である. 仮定 3 連続高解像度画像の画素値は同一画素内で一 定である.. −148−.
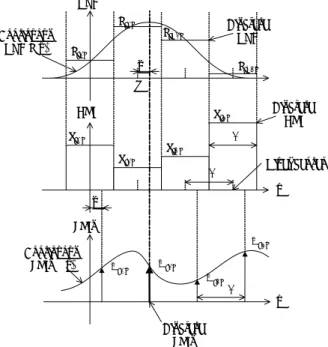
(3) 仮定 4 低解像度画像は,位置の重なりがなく,無限 に取得できる. カメラ PSF を単に空間不変と仮定している点が,こ れまでの研究 [11][12] と大きく異なる点である. 一般性を失わず,高解像度画像の画素間隔を 1 と して解析を行うことができる.ただし,高解像度画 像の画素間隔を 1 と考えると,PSF は高解像度画像 の低解像度画像に対する倍率 M をパラメータとして 含むようになる.この場合の具体的な PSF の例とし て,Box 型 PSF を (3) 式に,Gaussian 型の PSF を (4) 式に,それぞれ示す.. bbox (x, y) = bgau (x, y) =. 1 Π(x; M )Π(y; M ) M2 µ 2 ¶ x + y2 1 exp 2πM σ 2M 2 σ 2. PSF b [0] Continuous PSF b(x). HRI. h [1]. x δ. Continuous LRIs g(x). (7). i−1/2. さて,ある座標 y を (9) 式のように,y に最も近 い整数 ` と残りの小数部分 δ に分けて考える.. =. gδ [1]. g δ[ 0]. g δ [2]. `+δ. 1 x. ここで,N は一次元画像の大きさを,i は一次元画像 の離散座標を,h[i] は離散高解像度画像の位置 i にお ける画像値を,それぞれ表す.(6)・(7) 式より,(8) 式に示される離散高解像度画像から連続低解像度画 像への画像変換方程式を得る. ( ) N −1 Z i+1/2 X g(y) = b(y − x) dx × h[i] (8). y. g δ[ 3]. Discrete LRIs. Fig. 1. Models of continuous and discrete HRI, LRI, and PSF.. このとき,小数部分 δ の変域は −1/2 から 1/2 とな る.(9) 式の関係を利用して (8) 式を (10) 式の離散 畳込み演算の形式に簡単化することができる. ( ) N −1 Z i+1/2 X g(` + δ) = b(` + δ − x) dx × h[i] i−1/2. i=0. =. N −1 X. bδ [`-i]h[i]. (10). i=0. ここで,bδ [`] はオフセット δ の離散 PSF であり,(11) 式で定義される.. bδ [`]. =. Z. 1/2. −1/2. Π(x − i; 1) h[i]. Pixel center. 1. (4). ここで,y はレジストレーション後の低解像度画像 の座標である.仮定 3 を満足する連続高解像度画像 は,(5) 式の矩形関数を利用して,(7) 式のように定 式化できる.. i=0. 1 h[2 ]. LRIs. 前節の 4 つの仮定を利用して,低解像度画像を無 限に仮定した超解像の基本方程式の導出を行う.仮 定 1・2 を利用すれば,(1) 式の画像変換方程式から (6) 式を得る. Z g(y) = b(y − x) h(x) dx (6). i=0. Discrete HRI. h [3]. h[0 ]. (3). 超解像の基本方程式の導出. h(x) =. b[- 2]. k. 本節では,簡単のため,1 次元の問題として解析 を行うが,2 次元の問題へ簡単に拡張することが可 能である.. N −1 X. b[1] δ. ここで,Π(x; M ) は次式で定義される矩形関数である. ½ 1 (|x| ≤ M/2) Π(x; M ) = (5) 0 (|x| > M/2). 3.2. Discrete PSF. b[- 1]. b(` + δ − x) dx. (11). 次に,小数部分 δ を固定して考えると,g(` + δ) はひとつの離散画像を表しているとみなせる.この 離散画像は,連続観測画像 g(y) を高解像度画像の画 素間隔でサンプリングした画像と同一である.ただ し,サンプリング点は高解像度画像の画素中心と δ だけずれている.高解像度画像,低解像度画像および PSF に関して,それぞれ連続と離散の関係を Fig.1 に図示する. 離散画像 g(` + δ) をオフセット δ の離散低解像度 画像と呼び,gδ で表すことにする.(10) 式は,オフ セット δ の離散低解像度画像に対する超解像方程式 となる.その超解像方程式のベクトル表現が (12) 式 である.. (9). −149−. gδ. =. Bδ h. (12).
(4) ここで,Bδ は離散畳込み演算のカーネルを表す行列 である. 連続低解像度画像は,オフセット δ の離散低解像 度画像の線形結合として表される.従って,連続低 解像度画像に対する超解像方程式,すなわち超解像 の基本方程式も同様に,オフセット δ の離散低解像 度画像に対する方程式の線形結合として (13) 式のよ うに表現することができる.. =. g∞. =. (18). ここで,∗ は行列の共役転置を,λi (B∗ B) は行列 B∗ B の固有値を,それぞれ表す. 条件数定理. 補題を示した後,条件数定理を証明する.. ⎛. ⎞. gδ0 ⎜ gδ1 ⎟ = ⎝ ⎠, .. .. B∞. ⎛. ⎞. Bδ0 ⎜ Bδ1 ⎟ = ⎝ ⎠ .. .. (14). 超解像の条件数定理. 条件数に関する数学的な性質を概説した後に,超 解像の条件数定理を示し,証明する.. 3.3.1. v u max λ (B∗ B) i u i t min λi (B∗ B) i. 3.3.2. であり,i 6= j のとき δi 6= δj である.以上のように 前節で述べた 4 つの仮定から,(13) 式に示す超解像 の基本方程式が導出できた.. 3.3. cond(B). (13). B∞ h. ここで,. g∞. て計算することは現実的ではない.そこで,本研究 では,次式に示す条件数の性質を利用する [9].. 条件数の数学的性質. 条件数は,線形連立方程式の係数行列に対して定義 され,連立方程式の解を求める際の安定性の指標と して知られている [9].条件数の小さい連立方程式は 安定であり,条件数の大きい連立方程式は不安定で あるということができる.特に条件数が無限大のと きは,その連立方程式は特異である.(2) 式で示され るような連立方程式に対して,その条件数 cond(B) は (15) 式のように定義される.. cond(B) =. ||B||2 · ||B−1 ||2. (15). 補題 1. (13) 式の係数行列 B∞ に対して,(19) 式が 成り立つ.. λi (B∗∞ B∞ ). ≤ ≤. ||∆g||2 ||g||2 ||∆B||2 cond(B) ||B||2 cond(B). lim. K→∞. K−1 X k=0. |˜bδk [i]|2. (19). ˜ δ = (˜bδ [0], ˜bδ [1], · · · , ˜bδ [N-1])T は bδ の ここで,b k k k k k 離散フーリエ変換を表す.なお,T はベクトルの転 置を表す. 証明. オフセット δ の離散低解像度画像に対する超 解像方程式の係数行列 Bδ は,(20) 式のように対角 化される. ³ ´ ˜δ F Bδ = F−1 diag b (20). ここで,F は離散フーリエ変換の行列表現に対応す ³ ´ ˜ δ の要素を対 ˜δ は b るユニタリ回転行列を,diag b. 角成分にもつ対角行列を,それぞれ表す.次に,行列 B∗∞ B∞ の固有値を求めるため,対角化を行う.行列 B∞ の定義式と (20) 式の関係式より,行列 B∗∞ B∞ の対角化を次式のように行うことができる.. B∗∞ B∞. ここで,|| · ||2 は L2 ノルムを表す.条件数に関して, (16)・(17) 式の不等式が成立し,条件数は解の相対 誤差の上限を定める.. ||∆h||2 ||h||2 ||∆h||2 ||h + ∆h||2. =. =. = =. lim. K→∞. lim. K→∞ −1. F. K−1 X. B∗δk Bδk. k=0. K−1 X k=0. ³ ´ ³ ´ ˜∗ diag b ˜δ F F−1 diag b δ. diag (λ) F. (21). (16) (17). ここで,∆h は推定された高解像度画像の誤差を,∆g は観測された低解像度画像の誤差を,∆B は PSF に よって定まる係数行列の誤差を,それぞれ表す.(17) 式の不等式は,PSF の近似精度が多少悪くても条件 数が小さければ,結果として誤差の影響は小さく抑 えられることを示している. ところで,行列のノルムを直接計算することは一 般に困難であるので,条件数を (15) 式の定義に従っ. ここで,ベクトル λ の i 番目の要素 λi は次のように 表される.. λi. =. lim. K→∞. K−1 X k=0. |˜bδk [i]|2. (22). 行列 F はユニタリ行列であるので,(21) 式右辺の 対角成分は,行列 B∗∞ B∞ の固有値となる.従って, (19) 式を得る. 定理 1. (超解像の条件数定理) (13) 式 の 超 解 像 の 基 本 方 程 式 に 対 す る 条 件 数. −150−.
(5) cond(B∞ ) は (23) 式のように表される. cond(B∞ ) =. 1. r. (23). min β˜2 [i] i. ここで, K−1 1 X ˜ |bδk [i]|2 K→∞ K k=0 Z 1/2 |˜bδ [i]|2 dδ. ˜ 2 [i] = β. lim. =. (24) (25). −1/2. 2. ˜ = (β 2 [0], β 2 [1], · · · , β 2 [N-1])T である.ここでは,β とし,PSF の平均パワースペクトラムと呼ぶことに する. 証明. 規格化されたカメラ PSF を考えた場合,(26) 式の関係を仮定することができる1 .. max |λi (Bδ )| i. =. max |˜bδ [i]| = ˜bδ [0] = 1(26) i. パラメータ 1・2 が必要な理由は条件数定理より明ら かである.パラメータ 3 に関しては,PSF の平均パ ワースペクトラムを計算するために必要である. つまり,超解像の条件数定理は,任意の PSF に対 して,任意の倍率での条件数を算出することを可能 にする.得られた条件数は PSF 近似に対する重要な 指標となる.従って,条件数を比較し,条件数のよ り小さな PSF 近似を利用することにより,安定に高 解像度画像を推定することができる.また,同一の PSF 近似で倍率を変化させた場合も,条件数を比較 することにより,安定に高解像度画像を推定するこ とができる最適な倍率が設定でき,また倍率の限界 を示すことも可能にする.. 3.4. 本節では,(13) 式の超解像の基本方程式を ML 法 で解く場合を考える.この場合に,PSF の平均パワー ˜ 2 が ML 法の評価関数の勾配とどの スペクトラム β ような関係があるかを明らかにする.超解像の基本 方程式に関する ML 法の評価関数を (29) 式のように 定義する.. (26) 式を利用することにより,行列 B∞ に対する (18) 式の分子は (27) 式となる. max λi (B∗∞ B∞ ) i. =. lim. K→∞. K−1 X. K. (27). k=0. (27) 式の右辺は無限大に発散してしまうが,条件数 は (18) 式に示されるように最小固有値と最大固有値 の比であるので,条件数は収束する.(18)・(19)・(27) 式より,次式を得る. v u K−1 u X u lim K u K→∞ u k=0 u cond(B∞ ) = u . " # (28) K−1 X u t min lim |˜bδk [i]|2 i. K→∞. k=0. (28) 式を簡単にすることにより,(23) 式を得る.な お,δk の変域は −1/2 から 1/2 であり,δk が重なら ず無限あると考えた場合,(24) 式は (25) 式の積分の 形式に変形することができる.. 超解像の条件数定理を利用して条件数を算出するため に必要なパラメータは次の三つのパラメータである.. 1. 連続 PSF b(x) 2. 高解像度画像の低解像度画像に対する倍率 M 3. 低解像度画像の大きさ 1 この仮定を使わずとも定式化可能であるが,この仮定は十分 合理的であり,式が簡単化されるためここでは仮定を利用する.. 勾配制限. I. =. K−1 1 X ||gδk − Bδk h||22 K→∞ K. lim. (29). k=0. ここで,評価関数が発散するのを防ぐために K によ る規格化を行っている.評価関数の高解像度画像 h に関する微分は (30) 式となる.. ∂I ∂h. =. K−1 1 X ∗ Bδk Bδk eδk K→∞ K. −2 lim. (30). k=0. ここで,. eδk. =. B−1 δk gδk − h. (31). である.行列 Bδk の逆行列が存在しないことも考え られる.しかしながら,行列 Bδk は δk または倍率 M の関数と考えられ,極限値の意味で逆行列が存在 すると考えることができる. (30) 式の両辺にフーリエ変換に相当する回転行列 F をかけることにより,評価関数の微分の空間周波 数成分を次式のように得ることができる. ¯ ¯ ¯ ¯ ³ 2´ ¯ ∂I ¯ ¯ ¯F ¯ = 2 ¯¯diag β ˜ ˜ e (32) δ k¯ ¯ ∂h ¯ ³ 2´ ˜ |˜ ≤ 2 diag β (33) emax | ここで,|˜ emax | の i 番目の要素は{|eδ0 [i]|, |eδ1 [i]|, · · · } の最大値である.(33) 式の不等式は,PSF の平均パ ˜ 2 によって,評価関数の微分の ワースペクトラム β. 空間周波数成分が抑え込まれるということを表して いる.つまり,PSF の平均パワースペクトラムのあ る空間周波数成分が非常に小さければ,対応する評. −151−.
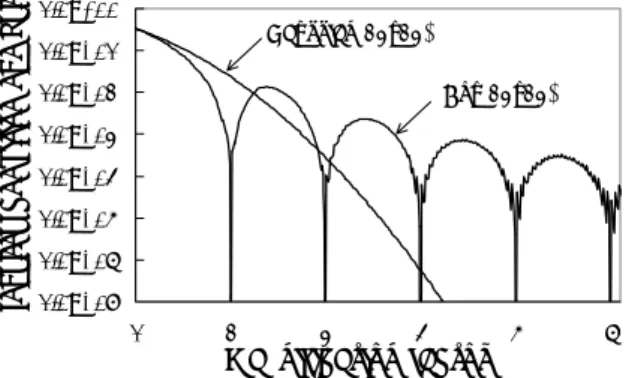
(6) Inverse condition number. 価関数の微分の空間周波数成分も小さくなる.評価 関数の微分の空間周波数成分が小さいということは, 高解像度画像のその空間周波数成分はほとんど更新 されないということを示している.このような制限 を,勾配制限と呼ぶことにする.特に PSF の平均パ ワースペクトラムが 0 であれば,その空間周波数成 分において高解像度画像は全く更新されない.PSF の平均パワースペクトラムが 0 である空間周波数を 特異な空間周波数と呼ぶことにする.. 1.0E+00. Gaussian(23x23). 1.0E-01 1.0E-02. Box(23x23). 1.0E-03 1.0E-04 1.0E-05 1.0E-06 1.0E-07 1. 4. Box 型および Gaussian 型 PSF の解析. 前節では,一般的な PSF に関して理論的な解析を 行った.本節では,具体的に Box 型および Gaussian 型 PSF を取り上げ,条件数および平均パワースペク トラムを示す.なお,前節の理論解析は一次元での解 析であったが,本節では二次元の場合の結果を示す.. 4.1. 条件数. Box 型および Gaussian 型 PSF それぞれに関して, 倍率 M を変化させながら条件数を算出した.Fig.2 に,条件数の逆数を対数軸としたときの結果を示す. 条件数の逆数は,その値が大きいほど問題が安定し ていることを示し,特にゼロの場合はその問題が特 異であることを表す.なお,低解像度画像サイズを 23 × 23 とし,(25) 式の積分計算には数値積分を利用 した.さらに,Gaussian 型 PSF の σ は倍率 M = 1 のときに,条件数が Box 型 PSF の条件数と等しく なるように σ = 0.3 とした. Box 型 PSF の場合,2 以上の整数倍率において 条件数の逆数がゼロとなっていることが特徴的であ る.これは,Box 型 PSF を仮定した場合,2 以上の 整数倍率は特異な問題となっていることを示してお り, Baker らおよび Lin らの従来研究と一致してい る [11][12].さらに,Box 型 PSF の条件数の逆数の大 まかな形状も Lin らの定量的な解析と一致する [12]. 超解像の条件数定理により,Box 型 PSF のみなら ず,任意の PSF の条件数が計算できるため,Gaussian 型 PSF に関しても同様に条件数の逆数が算出で きていることが,本研究の大きな特徴である. 例え ば,倍率が 1 から 2.25 の範囲では,Gaussian 型 PSF の条件数の逆数が Box 型 PSF を上回っているため, この範囲の倍率に対しては Gaussian 型 PSF を利用 するほうが適切であることが簡単にわかる.それ以 外の倍率に関しても,条件数の逆数を比較すること により,どちらの PSF 近似を利用するのが適切であ るかを判断することが可能である. 4.2. 平均パワースペクトラム. 勾配制限は,PSF の平均パワースペクトラムが 小さければ,ML 法の評価関数の空間周波数成分も 小さいということを示している.具体的に,Box 型 PSF および Gaussian 型 PSF に関して,倍率 M =. 2. 3. 4. 5. 6. Magnification factor Fig. 2. Inverse condition numbers of Box type PSF and Gaussian type PSF(σ = 0.3) for LRI size 23 × 23.. 2.0, 2.5, 3.0 の場合の平均パワースペクトラムを計算 した.その結果を Fig.3 に示す. Fig.3 より,倍率によらず Gaussian 型 PSF の平均 パワースペクトラムは,空間周波数に対して単調に減 少しているのが確認される.その一方で,Box 型 PSF の平均パワースペクトラムは特定の空間周波数におい て,非常に小さな値となっている.特に倍率が M = 2.0, 3.0 では,黒で示されている空間周波数の平均パ ワーは 0 であり,特異な空間周波数となっている.特 異な空間周波数は M = 2.0 の場合,0.5[HRI pixel−1 ] であり,M = 3.0 の場合,0.333[HRI pixel−1 ] であ る.勾配制限により,高解像度画像を更新する際に, この特異な空間周波数成分は,全く更新されないこ とが予想される.. 5. 合成画像による実験. 超解像の条件数定理と勾配制限の有効性を確認す るために,合成画像を用いて実験を行った.Fig.4 に 示す画像を真の高解像度画像として用意した.この 画像に対して,Box 型 PSF を仮定し,256 枚の低解 像度画像を作成した.このとき,低解像度画像の大 きさを 23 × 23,平行移動の間隔は低解像度画像の画 素間隔の 1/16 刻みとしている.位置あわせは正確で あると仮定している. 勾配制限の効果が顕著にあらわれるように Fig.5 に示す 3 種類の初期画像を用意した.これらの初期 画像は,Fig.3-(a) の Box 型 PSF の平均パワースペ クトラムが最小値となる空間周波数成分のみを,そ れぞれ有している. Box 型 PSF と Gaussian 型 PSF(σ = 0.3) を仮定 して,ML 法による超解像処理を行った.このとき, 繰返し数は 200 回として,倍率は M = 2.0, 2.5 およ び 3.0 の 3 種類に対して超解像処理を行った.超解 像処理結果を Fig.6 に示す.また,それぞれの条件 数の逆数も図の副題に示してある. まず,Box 型 PSF(M = 2.5) と Gaussian 型 PSF(M = 2.0) の条件数の逆数に注目すると,それ. −152−.
(7) M = 2.0, min = 0. M = 2.0,. M = 2.5, min = 1.32 × 10−4 (a) Box PSF. M = 3.0, min = 0. M = 2.5,. M = 3.0,. (a) Fig. 4. Ground truth. min = 5.76 × 10−4 min = 1.02 × 10−5 min = 7.95 × 10−6. (b) Gaussian PSF(σ = 0.3). Min. (b). (c). Fig. 5. Part of the initial image for superresolution by the ML method. Those shown in (a), (b) and (c) have only the spatial frequency component at (0.5, 0.5), (0.4, 0.4), and (0.333, 0.333) in HRI pixel units, respectively.. Max(=1). (c) Scale. では更新されることなく,超解像処理結果にあらわれ てしまう.これが超解像処理結果のノイズである.そ の一方で,Fig.5-(a) および (b) の初期画像が有して いる空間周波数成分に関する Box 型 PSF(M = 3.0) の平均パワースペクトラムは 0 ではない.従って,初 期画像は更新され,超解像処理の結果にも初期画像 の成分はあらわれず,良好な結果を示す.. Fig. 3. Average power spectrum of PSF (LRI size: 23 × 23), the top left is the origin of spatial frequency (0,0), the bottom right is the maximum spatial frequency (0.5, 0.5) in HRI pixel units, the scale is normalized for each image.. ぞれ 1.15 × 10−2 ,2.40 × 10−2 である.これらの条件 数の逆数は,比較的大きな値を示している.対応す る超解像処理結果も,他の条件と比較した場合,初 期画像によらずノイズが小さく良好な結果を示して いる.超解像の条件数定理から導かれる条件数の逆 数からも,実験結果からも,Box 型 PSF(M = 2.5) と Gaussian 型 PSF(M = 2.0) の二つの PSF 条件が 他の PSF 条件よりも安定であるという一致した結果 が得られた. 本研究の条件数定理から計算される条件数も,こ れまでの研究においても [11][12],Box 型 PSF の場 合,倍率が 2 以上の整数では特異な問題となるため, 解が安定に得られないということが示されている.し かしながら,M = 2.0 と M = 3.0 の Box 型 PSF に 対する超解像結果は,Fig.6 に示すとおり,いくつか の初期画像に対しては,ノイズがなく良好な結果と なっている.このような初期画像に対する依存性は, これまでの研究では説明することができない.一方, 本研究の勾配制限の関係を利用することにより,この 初期画像依存性を簡単に説明することが可能である. 例として,Box 型 PSF(M = 3.0) の場合を考え る.ノイズの多い結果を与えている Fig.5-(c) の初 期画像は,(0.333, 0.333) の空間周波数成分のみをも つ画像である.また,Fig.3-(a) に示すように Box 型 PSF(M = 3.0) の平均パワースペクトラムは, (0.333, 0.333) において 0 であり,この空間周波数は 特異な空間周波数であることが確認できる.したがっ て,初期画像がもつ特異な空間周波数成分は ML 法. 次に,Gaussian 型 PSF に注目する.Gaussian 型 PSF の平均パワースペクトラムは空間周波数に対し て単調に減少する.本研究では,高解像度画像の画 素間隔を 1 と仮定しているので,空間周波数の最大 値は 0.5 である.従って,Gaussian 型 PSF の平均パ ワースペクトラムは空間周波数が (0.5, 0.5) において 最小となる.以上のことから,空間周波数 (0.5, 0.5) の成分のみを有する Fig.5-(a) の初期画像に対する超 解像処理結果が最も悪いことが予想される.Fig.6 の 結果も,この予想と一致している.特に,Fig.5-(a) の初期画像に対する超解像処理結果を,倍率を変化 させながら比較すると,倍率を大きくするに従って, ノイズの大きくなっていることが確認される.この 結果も,Gaussian 型 PSF の条件数の逆数が倍率に 対して単調減少するという理論解析の結果と一致し ている.. 6. むすび. 本研究では,超解像の条件数定理を導出し,また 証明を行った.条件数定理は,任意の PSF に対して, 任意の倍率における条件数を算出する方法を示した ものである.さらに,ML 法の評価関数に勾配法に 関する勾配制限も示した.勾配制限は,PSF の平均 パワースペクトラムによって勾配が制限されること も示した.超解像の条件数定理と勾配制限を合成画 像を利用した実験により確認した.従来の研究では, 説明できない現象についても,条件数定理と勾配制 限により明確に説明可能であることを示した.. −153−.
(8) (a) Box PSF (M = 2.0), ICN=0. (b) Box PSF (c) Box PSF (M = 2.5), (M = 3.0), ICN=1.15 × 10−2 ICN=0. (d) Gaussian PSF (e) Gaussian PSF (f) Gaussian PSF (M = 2.0), (M = 2.5), (M = 3.0), ICN=2.40 × 10−2 ICN=3.20 × 10−3 ICN=2.82 × 10−3. Fig. 6. Super resolution results. ICN represents the inverse condition number. The first, second and third rows are calculated from initial images shown in Fig. 5(a), 5(b) and 5(c), respectively. The magnification factors of the first and fourth columns are 2.0, those of the second and fifth columns are 2.5, and those of the third and sixth columns are 3.0.. 参考文献 [1] Sung C. P., Min K. P. et al, “Super-Resolution Image Reconstruction: A Technical Overview,” IEEE Signal Proc. Magazine, Vol. 26, No. 3, pp. 21-36, 2003. [2] B.C. Tom and A.K. Katsaggelos, “Reconstruction of a high-resolution image by simultaneous registration, restoration, and interpolation of low-resolution images,” Proc. IEEE Int. Conf. Image Processing, Vol. 2, pp. 539-542, 1995. [3] R.R. Schulz and R.L. Stevenson, “Extraction of high-resolution frames from video sequences,” IEEE Trans. Image Processing., Vol. 5, pp. 996-1011, 1996. [4] H.Stark and P.Oskoui, “High resolution image recovery from image-plane arrays, using convex projections,” J. Opt. Soc. Am. A, Vol. 6, pp.1715-1726, 1989. [5] 後藤,奥富, “単板カラー撮像素子の RAW データを利 用した高精細画像復元,” 情報処理学会論文誌:コン ピュータビジョンとイメージメディア,Vol.45,No.SIG 8(CVIM 9),pp.15-25, 2004. [6] T.Goto and M.Okutomi, “Direct Super-Resolution and Registration Using Raw CFA Images, ” Proc. of IEEE Computer Society Conference on CVPR, Vol. II, pp. 600-607, 2004. [7] 田中,奥富, “再構成型超解像処理の高速化アルゴ リズム,” 情報処理学会研究報告 2004-CVIM-146, Vol.2004,No. 113,pp. 97-104,2004.. [8] N.Nguyen, P. Milanfar et al, “A Computationally Efficient Superresolution Image Reconstruction Algorithm,” IEEE Trans. Image Processing, Vol. 10, No. 4, pp. 573-583, 2001. [9] 伊理正夫 “線形代数 I, II,” 岩波書店, 1994. [10] M. Elad and A. Feuer, “Restoration of a Single uperresolution Image from Several Blurred, Noisy, and UnderSampled Measured Images,” IEEE Trans. Image Processing, vol. 6, no. 12, pp. 1646-1658, 1997. [11] S. Baker and T. Kanade, “Limits on SuperResolutino and How to Break Them,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 24, no. 9, pp. 1167-1183, 2002. [12] Z. Lin and H.Y. Shum, “Fundamental Limits of Reconstruction-Based Superreslution Algorithms under Local Translation,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 26, no. 1, pp. 83-97, 2004. [13] D. Capel, “Image Mosaicing and SuperResolution,” Springer Verlag, 2004 [14] D. Robinson and P. Milanfar, “Fundamental Performance Limits in Image Registration,” IEEE Trans. Image Processing, vol. 13, no. 9, pp. 11851199, 2004. [15] 清水,矢野,奥富, “2 次元サブピクセル同時推定を 拡張した画像変形 N パラメータ同時推定,” 情報処理 学会 研究報告 2004-CVIM-143,Vol. 2004,No. 26, pp. 81-88, 2004.. −154−.
(9)
図

関連したドキュメント
From this, one can easily find an induced splitting of the computational energy space V n , where the condition number is independent of the anisotropy of the problem and
As an approximation of a fourth order differential operator, the condition number of the discrete problem grows at the rate of h −4 ; cf. Thus a good preconditioner is essential
Thus, we use the results both to prove existence and uniqueness of exponentially asymptotically stable periodic orbits and to determine a part of their basin of attraction.. Let
(9) As an application of these estimates for ⇡(x), we obtain the following result con- cerning the existence of a prime number in a small interval..
An integral inequality is deduced from the negation of the geometrical condition in the bounded mountain pass theorem of Schechter, in a situation where this theorem does not
In the present paper, we focus on indigenous bundles in positive characteris- tic. Just as in the case of the theory over C , one may define the notion of an indigenous bundle and
Applications of msets in Logic Programming languages is found to over- come “computational inefficiency” inherent in otherwise situation, especially in solving a sweep of
The first result concerning a lower bound for the nth prime number is due to Rosser [15, Theorem 1].. He showed that the inequality (1.3) holds for every positive
