曲線の和に関する Arnold 不変量の加法性
杉山 龍太郎
(信州大学大学院理工学系研究科)境 圭一
(信州大学)概 要
本稿では平面上のgeneric閉曲線(定義2)のgenericホモトピー(定義4)に ついて論じる. 特に, generic閉曲線に対するgenericホモトピー不変量であ るArnold不変量St, J±(定理14, 15, 16)の, 曲線の和に関する加法性につ いて考察する. また2つの曲線を分離する際の, 符号を含めた接触回数の計 算方法についての研究結果を報告する.
1.
研究動機
generic
閉曲線を, 定義
5の同値関係によって分類することを目標として研究が始められ
た. Arnold (1994) は
2つの閉曲線の連結和
(connected sum)に関して,
St, J±が加法的 であること, 連結和をより一般化した
strange sumに関して,
Stが加法的であること を示した. その後
Mendes de Jesus-Romero Fuster (2002)が曲線同士が交差を持つ和に おける
J±の加法性について, ある特別な場合について考察した.
より一般化された曲線の和に関して, Arnold 不変量の加法性がどのようになっている のか疑問を抱き, Mendes de Jesus-Romero Fuster らの論文で定義された, 2 つの曲線を 分離する際の符号を含めた接触回数を数えた
T±の計算方法を与えたい, と考えた. 一 般化された連結和に対する不変量の振る舞いを記述する上で, 必ず
T±が必要であった ので, 計算方法を与える必要があった.
2. Generic
閉曲線
, Genericホモトピー
定義
1.閉曲線
c : S1 → R2が正則
(regular)であるとは, 任意の
t ∈ S1に対して,
˙
c(t)̸= 0
をみたすことである.
定義
2.正則な閉曲線
c:S1 →R2が
(1)任意の
v ∈R2に対し, #
c−1(v)≤2,(2) s̸=t, c(s) =c(t)
となる任意の
s, t ∈S1に対し,
c(s),˙ c(t)˙が一次独立, をみたすとき,
cを
generic閉曲線
(generic closed curve)という.
定義
3.定義
2のようなパラメータ付け可能な
C ⊂ R2も
generic閉曲線とよび, パラ メータを指定したものを向き付けられた
generic閉曲線とよぶ.
以下, 向きのついていない曲線は大文字で表し, 向きの付いた曲線, またはそのパラ メータについては小文字で表す事にする.
定義
4. h:S1×I →R2を
2つの
generic曲線を結ぶホモトピーとする.
ht(s) = h(s, t)とあらわす.
hが次の
(1)〜(3)を満たすとき,
hは
genericホモトピーであるという:
(1)
各
ht:S1 →R2は正則,
(2)
有限個の
ti ∈I(i= 1,2, . . . , n)を除いて,
htは
generic曲線,
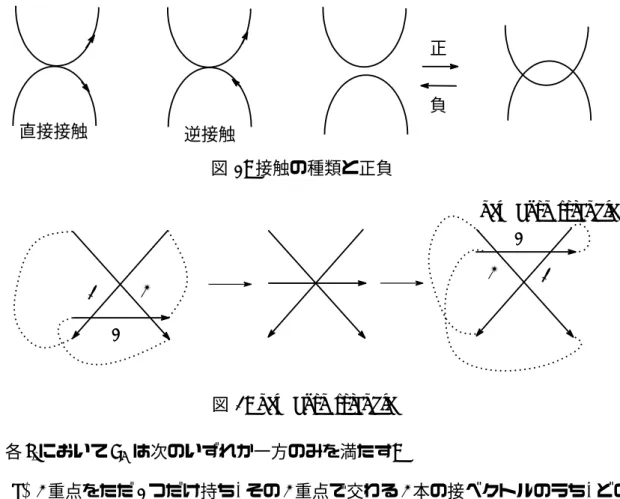
直接接触 逆接触
正
負
図
1:接触の種類と正負
1
2 3
1 3 2
new born triangle
図
2: new born triangle (3)各
tiにおいて
htiは次のいずれか一方のみを満たす:
(a) 3
重点をただ
1つだけ持ち, その
3重点で交わる
3本の接ベクトルのうち, どの
2
つも
1次独立である.
(b)
自己接触をただ
1つだけ持ち, 接触する
2本の辺の曲率が異なる.
Generic
ホモトピー
hについて,
htが自己接触を持つとき,
hは
tにおいて自己接触を
通過すると呼ぶ. また
htが
3重点を持つとき
3重点を通過すると呼ぶ.
定義
5.閉曲線
c0, c1について,
2つを結ぶ
genericホモトピーで, 自己接触や
3重点通過 をしなものが存在するとき,
c0 ∼c1と定義する.
定義
5の同値関係について, generic 閉曲線を分類することが本研究の目標である.
定義
6.自己接触を通過する際, 接触する点における
2本の辺の速度ベクトルが同じ向 きであるとき, この接触は直接
(direct),逆向きであるとき, この接触は逆
(inverse)であ ると言う.
注意
7.自己接触が直接か逆かは, 曲線の向きを変えても変わらない. よって自己接触 が直接か逆かは, 向き付けられていない閉曲線に対して定まる.
定義
8.自己接触を通過した後,
2重点が増えるとき, この接触は正
(positive),減ると きを負
(negative)であると言う.
定義
9. genericホモトピーの3重点通過が正
(positive)であるとは,
new born triangleによって決まる値
qが偶数のときをいう. ただし
new born triangleとは, 3 重点通過後 に出来る, 3 本の辺によって作られる三角形のことである.
qは, 3 重点の近くの
3本の 辺を通る順序によって定まるサイクルの向きと同じ向きを持つ辺の数である.
図
2の場合は
1と
2の辺の向きがサイクルの向きと一致しているため,
q= 2となる.
K0 K1 K2 K3
. . .
図
3: standard curve注意
10.曲線の向きを逆にしても,
qの値は変わらない. また
3本の辺の順序を巡回的 に変えても
qの値は変わらない. よって
3重点通過の正負は, 向き付けられていない閉 曲線に対し定まる.
定義
11.正則曲線
c:S1 →R2に対し,
γc :S1 →S1を
γc(t) := c(t)˙|c(t)˙ |
とする. このとき
degγcを
cの指数
(index)といい, ind(c) と書く.
定理
12 ([3]).正則曲線の指数は正則ホモトピー不変量である. さらに
c0と
c1が正則
ホモトピックであるための必要十分条件は, これらの指数が等しいことである.
3. Arnold
不変量
定義
13. standard curve Knを図
3のような
generic閉曲線とする.
定理
14 ([1]).向き付けられていない
generic閉曲線に対し,
3重点を通過しない
genericホモトピーに関する不変量
Stで,
(1) generic
閉曲線
cが,
3重点を
1つ正に通過して
c′に変形したとき,
St(c′)−St(c) = 1, (2) St(K0) = 0, St(Ki+1) = i (i= 0,1, . . .)となるものが一意的に存在する.
定理
15 ([1]).向き付けられていない
generic閉曲線に対し, 直接接触を通過しない
generic
ホモトピーに関する不変量
J+で
(1) generic
閉曲線c が, 直接接触を
1つ正に通過して
c′に変形したとき,
J+(c′)−J+(c) = 2,(2) J+(K0) = 0, J+(Ki+1) =−2i (i= 0,1, . . .)
となるものが一意的に存在する.
定理
16 ([1]).向き付けられていない
generic閉曲線に対し, 逆接触を通過しないgeneric ホモトピーに関する不変量
J−で
(1) generic
閉曲線
cが, 逆接触を
1つ正に通過して
c′に変形したとき,
J−(c′)−J−(c) =−2,
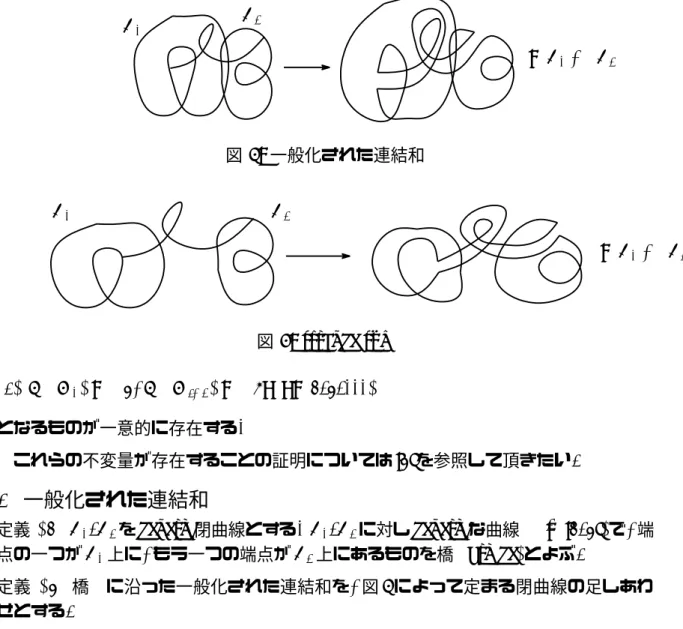
=C0+ΓC1 Γ
C0 C1
図
4:一般化された連結和
ΓC0 C1
=C0+ΓC1
図
5: strange sum (2) J−(K0) =−1, J−(Ki+1) =−3i (i= 0,1, . . .)となるものが一意的に存在する.
これらの不変量が存在することの証明については
[1]を参照して頂きたい.
4.
一般化された連結和
定義
17. C0, C1を
generic閉曲線とする.
C0, C1に対し
genericな曲線
Γ (∼= [0,1])で, 端 点の一つが
C0上に, もう一つの端点が
C1上にあるものを橋
(bridge)とよぶ.
定義
18.橋
Γに沿った一般化された連結和を, 図
4によって定まる閉曲線の足しあわ せとする.
必要に応じて足し合わせた曲線に向きを入れて考え, それに矛盾が無いように足し合 わせる
2つの曲線にそれぞれ向きを与える.
定義
19. C0, C1を
2つの
generic閉曲線とする.
C0 ∩C1 =∅のときの一般化された連 結和を
strange sumと呼ぶ. 図
5が
strange sumの例である.
定義
20.定義
19と同じ仮定で, 更に
Γの
2重点の個数
nΓ = 0のとき,
C0+ΓC1を連結 和
(connected sum)と呼び, 単に
C0+C1で表す
(図6).Γ
C0 C1
図
6:連結和
˙ c(0)
R v
˙ c(0)
v s=−1
s= 1
˙ c(0)
図
7: s=±1の決め方
定理
21 ([1]).連結和に対して
Arnold不変量は加法的である. つまり
C0, C1を
generic閉曲線とすると
J±(C0) +J±(C1) = J±(C0+C1), St(C0) +St(C1) = St(C0+C1).
定理
22 ([1]). Strange sumに関して,
Stは加法的である.
5. Alexander numbering,
法線指数
,曲線の分離
C ⊂ R2
を向きのついていない
generic閉曲線とする. Mendes de Jesus-Romero Fuster が
J±に関して, 一般化された連結和の特殊な場合に関しての加法性を得ている
(定理 38).それを更に一般化することを目標としている.
定義
23. c:S1 → R2をを向き付けられた閉曲線とし,
C :=c(S1)とおく.
Rを
R2\Cの連結成分の
1つとし,
pを
R内の任意の点とする.
eiθ(t) = c(t)−p
|c(t)−p|
となる連続関数
θ : [0,2π]→Rを選ぶとき
indR(c) := θ(2π)−θ(0) 2π
を
cに関する
Rの
Alexander numberingと呼ぶ.
注意
24. Alexander numberingは
pの選び方には依存しないが, 曲線の向きには依存
する.
x∈C
を
2重点でない点,
vを
xにおける
Cの単位法ベクトルとする. (x, v) に対して
indv(C)∈Zを次のように定義する.
定義
25. Rを
vが指し示す
R2−Cの連結成分とする. このとき
Cのパラメータ
cを一 つ選んで
indv(C) := s·indR(c)
とおき,
Cの
v方向の法線指数とよぶ. ただし,
s =±1は,
Rから見て曲線が
xの近傍 で右
(左)に進むとき
+1 (−1)である
(図7).補題
26. indv(C)はパラメータ
cの取り方によらず定まる. 特に
indv(C)は
Cの向きに
関係なく定まる.
図
8:分離の例
定義
27. C0, C1を閉曲線とする. この
2つの曲線を正則ホモトピーで動かす事で
C0 ⊂ {(x, y) ∈ R2 | x > 0}, C1 ⊂ {(x, y) ∈ R2 | x < 0}となるようにする操作を分 離
(separation)と呼ぶ. 分離を行ったあとの
2つの閉曲線
C0, C1は分離されている
(separated)という.
定義
28. Aを
2重点とする.
Aを
1番目の速度ベクトルの向きに出発し, 次に
Aに戻っ てくるまでの部分のパラメータ
c: [0,1]→R2をえらぶ.
θ: [0,1]→Rを
eiθ(x) = c(x)−c(0)
|c(x)−c(0)| (0< x <1), eiθ(0) = c(0)˙
|c(0)˙ |, eiθ(1) =− c(1)˙
|c(1)˙ |
を満たす連続関数とする. このとき
2(θ(1)−θ(0)) π
を
2重点
Aの第一半指数
(half index)とよび,
i1(A)とかく.
Aを
2番目の速度ベクトル の向きに出発して同様に定義される値を
Aの第二半指数とよび,
i2(A)と書く.
注意
29.半指数
i1, i2は
θの選び方によらない.
定義
30.向きのついた
generic閉曲線
cの
2重点
Aに対し
i(A) = i1(A)−i2(A)を
Aの指数
(index)とよぶ.
補題
31. 2重点の半指数は曲線の向きに依存するが, 指数は向きに依存しない.
定義
32. cを,
2重点
A1, . . . , Anを持つ, 向きのついた
generic閉曲線とする. このとき
I±(c)を
I±(c) =
∑n
k=1i(Ak)±2n 4
と定義する.
2
重点の指数が曲線の向きによらないから,
I±も曲線の向きに関係なく定まり, 次の 関係が成り立つ.
定理
33. J±=I±−3St.ci ci
Γ
ci
Γ
ci
Γ
図
9: Push appendixによる交点の増加の様子
1 2 3
1 2 3
図
10:和に関する
3重点通過する辺の向きの入れ方
6. strange sum
に関する
J±の加法性
定理
34. C0, C1を分離された
generic閉曲線とする.
γ : [0,1]→ R2を
C0, C1をつなぐ 橋のパラメータとし,
Γ :=γ([0,1])の
2重点の個数を
nΓとする. このとき
J±(C0+ΓC1) = J±(C0) +J±(C1) + indγ(0)˙ (C0) + ind−γ(1)˙ (C1)±2nΓ±|IntΓ∩(C0∪C1)|.
証明の概要だけ記す.
C0+ΓC1の向きを一つ選び, その向きに矛盾がないように
Ci (i= 0,1)の向きを選ぶ.
Ciの
Γに沿った
push appendixという操作
[1]を考える
(図9参 照). この変形によって,
C0+ΓC1 =C0′ +C1′ (右辺は連結和)となるような
Ci′になるま で変形する. このとき
Ciから
Ci′への変形の途中での接触の様子を調べることで
I±(Ci′) = I±(Ci) + ind(−1)iγ(i)˙ (Ci)±2nΓ± |IntΓ∩Ci|
が得られる. これを定理
33に適用すれば結果を得る.
7.
曲線の和から自然に入る向きに関する曲線の分離の際の接触回数
C0
と
C1を
generic閉曲線として変えないまま分離するとき,
C0と
C1は分離の途中で 何度か接触や
3重点通過を起こす. 例えば図
8の場合, 直接接触や
3重点通過はなく, 負 の逆接触を
1回起こすように分離することができる.
定義
35. C0, C1を
generic閉曲線とし, Γを
C0, C1を結ぶ橋とする. それぞれの向き
c0, c1を,
c0+γc1に矛盾がないように選ぶ.
c0, c1を分離する際の
3重点通過の符号は
(−1)qによって与える. ただし
vanishing / new born triangleの辺順序の付け方は,
c0+γc1か ら自然に決まるものとする.
定義
36. c0, c1を向きのついた閉曲線とし,
Γを
C0, C1を結ぶ橋とする. それぞれの向
き
c0, c1を,
c0+γc1に矛盾がないように選ぶ.
c0と
c1を
generic閉曲線として変えない
まま分離するとき,
c0 c0
ˆ c0 c1
c1 ˆc1
γ
ˆ (1) γ
(1)−
ˆ
c0 ˆc1
図
11:曲線同士の交差の解消
• TΓ+(c0, c1)
を,
c0と
c1の間で起こる正の直接接触の回数から負の直接接触の回数 を引いた値,
• TΓ−(c0, c1)
を,
c0と
c1の間で起こる正の逆接触の回数から負の逆接触の回数を引 いた値,
• TΓSt(c0, c1)
を,
c0と
c1の間で起こる正の3 重点通過の回数から負の
3重点通過の回 数を引いた値,
と定める.
これらは
Γに依存する値である. 混同のおそれが無い場合には
Γを省略し,
T±(c0, c1), TSt(c0, c1)などとも書く.
これらの値は
[2]で導入された値だが, その計算方法は
[2]では述べられていないので, 本稿の§
10で計算方法を与える,
8.
一般化された連結和の特別な場合に関する
J±の加法性
Γ
は
generic閉曲線
C0と
C1の間の橋で, そのパラメータ
γ : [0,1]→R2, γ([0,1]) = Γは
γ(i)∈ Ci (i = 0,1)となるように選ぶ.
Ciの向き
ciを選ぶ場合は,
c0 +γ c1に矛盾なく 向きが入るものとする.
定義
37. C0, C1を
generic閉曲線,
Γを
C0, C1の間の橋とする.
Γ∩C1上の点
xについ て,
C1と
C0が
x, γ(0)において同じ向きであるとは,
γ(0)における
C0の速度ベクトル
(をΓに沿って
xまで平行移動したもの) が
xにおける
C1の速度ベクトルと
π/2未満の 角をなすこと, そうでないとき,
C1と
C0は
x, γ(0)において逆の向きであるという.
同様に, Γ
∩C0上の点
yについて,
C0と
C1が
y, γ(1)において同じ向きであるとは,
γ(1)における
C1の速度ベクトル
(をΓに沿って
yまで平行移動したもの) が
yにおける
C0の 速度ベクトルと
π/2未満の角をなすこと. そうでないとき,
C0と
C1は
y, γ(1)において 逆の向きであるという.
定理
38 ([2]). Generic閉曲線
C0, C1を結ぶ橋
Γが
Γ∩(C0 ∪C1) = ∅かつ
nΓ = 0を満 たすとき
J±(C0+ΓC1) = J±(C0) +J±(C1)−2TΓ±(C0, C1) + 2(
indγ(0)˙ (C0) + ind−γ(1)˙ (C1)) .
ただし
Γのパラメータ
γは
γ(i)∈Ci (i= 0,1)となるように選ぶ.
C0 C0 C0 C1
l0−
に寄与
l0+に寄与
Γ γ(1)
R R′
Cˆ0 Cˆ0 Cˆ0 C1
Γˆ γ(1)
R R′
図
12: s= +1のときの
push appendixの様子
証明の概要だけ記す. 図
11の
(1)のように,
c0を
−γ(0)˙方向に,
c1を
γ(1)˙方向に平行 移動して分離する. 分離後の曲線は
ˆc0,cˆ1で表すことにする. この変形に合わせて
γを 引き伸ばして得られる曲線を
γˆとする. このとき
cˆ0+ˆγˆc1は
ˆγに関する
strange sumに なっている. 今の状況では
nγˆ = 0だから, 定理
34を適用する.
9.
一般化された連結和に関する
J±の加法性
定理
38を使って, 一般化された連結和に関する
J±の加法性について考える.
補題
39. C0, C1を
generic閉曲線とし, γ : [0,1]→R2を
C0と
C1を結ぶ橋で,
γ(0)∈C0, γ(1) ∈ C1となるものとする.
C0に
Γ := γ([0,1])に沿った
push appendixを行い,
C0 +ΓC1 = ˆC0+Γˆ C1で, ˆ
Γは自己交差を持たず, Intˆ
Γ∩Ci =∅となるような
Cˆ0に変形 する
(図12). y∈IntΓ∩Cˆ0で, ˆ
C0と
C1が
y, γ(1)において同じ向きであるようなものの 数を
l0+,逆向きであるようなものの数を
l0−とおく. このとき
indγ(0)˙ˆ ( ˆC0) = indγ(0)˙ (C0)−l0−+l0+
が成り立つ.
定理
40. C0, C1を
generic閉曲線とし, γ : [0,1]→R2を
C0と
C1を結ぶ橋で,
γ(0)∈C0, γ(1) ∈ C1とする.
Γ∩Ci (i = 0,1)上の点で, Γ に関して
γ(i+ 1)と同じ向きである点 の個数を
l+iとおき, 逆向きの点の個数を
l−iとおく. ただし
γ(2) = γ(0)とみなす. この とき
J±(C0+ΓC1) = J±(C0) +J±(C1)−2T±(C0, C1) + 2(
indγ(0)˙ (C0) + ind−γ(1)˙ (C1))
±2nγ±2(l0±+l1∓).
証明
. Γに沿った
c0の
push appendixを考え,
c0+Γc1 = ˆc0+Γˆc1となるようにする. た
だし
Γˆは定理
38の
Γと同じ条件を満たすものとする.
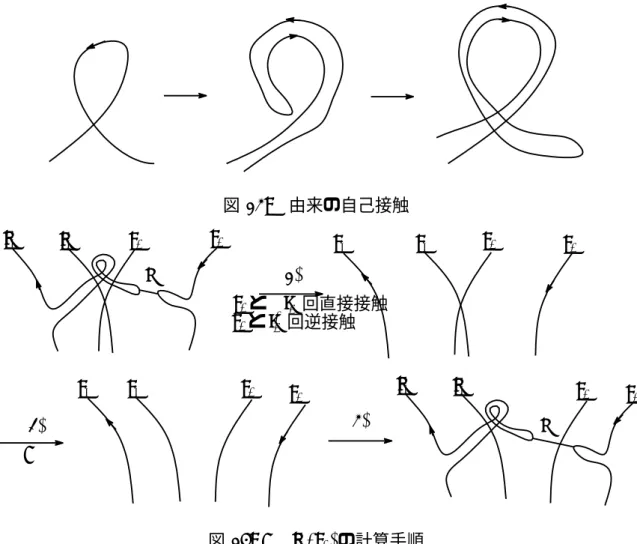
図
13: γ由来の自己接触
c0 c0 c1 c1
ˆ
c0 c1 ˆ
c0 c1
Γˆ
c0 c0 c1 c1
(1)
Tγ±
c1
と
−l−1回直接接触
c1と
l+1回逆接触
ˆ
c0 c1
ˆ c0
c1 Γˆ
(2) (3)
図
14: T±(ˆc0, c1)の計算手順
Push appendix
によって生じる接触回数は次のとおりである. まず,
c0と
Γの交点に由
来して,
l−0回の直接接触と
l+0回の逆接触が起こる.
γがもつ
2重点由来の自己接触は図
13のようになっていて, 2 重点
1つに対し, 直接接触が
1回, 逆接触が
1回起きている.
よって
J+(ˆc0) =J+(c0) + 2l0−+ 2nγ, J−(ˆc0) =J−(c0)−2l+0 −2nγ. T±(ˆc0, c1)
を, ˆ
c0と
c1の分離を次のような手順に分解することにより計算する:
(1) ˆc0
を一度
c0に戻し,
(2) c0と
c1を分離し,
(3) c0を
cˆ0に戻す.
という手順に分解して計算する. それぞれ図
14より
(1)のとき直接接触が
−l−1回, 逆接触が
−l1+回起こり,
(2)
のとき直接接触が
T+(c0, c1)回, 逆接触が
T−(c0, c1)回起こり,
(3)では
c0と
c1の間で接触が起こらない.
図
15: smoothing図
16: K2の
smoothing図
14は
s= 1の場合だが,
s=−1の場合も同様である. よって
Tˆγ+(ˆc0, c1) = Tγ+(c0, c1)−l−1, Tˆγ−(ˆc0, c1) =Tγ−(c0, c1) +l1+
となる. また
indγ(0)˙ (c0) +l0−−l+0 = indγ(0)˙ˆ (ˆc0)である.
c0 +Γc1 = ˆc0 +Γˆ c1であり,
ˆc0 +Γˆ c1
には定理
38を適用できるから
J+(c0+Γc1) = J+(ˆc0+Γˆc1)=J+(ˆc0) +J+(ˆc1)−2Tˆ+
Γ(ˆc0, c1) + 2(indγ(0)˙ˆ (ˆc0) + ind−γ(1)˙ˆ (c1))
=J+(c0) +J+(c1) + 2l0++ 2nΓ−2(TΓ+(c0, c1)−l−1) + 2(indγ(0)˙ (ˆc0) +l0−−l0++ ind−γ(1)˙ (c1))
=J+(c0) +J+(c1) + 2nΓ−2TΓ+(c0, c1)
+ 2(indγ(0)˙ (c0) + ind−γ(1)˙ (c1)) + 2(l0++l−1).
同様にして計算すると
J−(c0+Γc1) = J+(c0)+J+(c1)−2nΓ−2TΓ−(c0, c1)+2(indγ(0)˙ (c0)+ind−γ(1)˙ (c1))−2(l0−+l+1).
10. TΓ±
と
TΓStの計算方法
定義
41. cを向き付けられた
generic閉曲線とする.
2重点の近くで
cをつなぎかえる操 作の事を,
cを
smoothingすると言う
(図15参照).
smoothing