二足歩行の実時間軌道計画
有 田 輝
電 気 通 信 大 学 大 学 院 情 報 理 工 学 研 究 科 博 士( 工 学 )の 学 位 申 請 論 文
2019 年 3 月
二足歩行の実時間軌道計画
博 士 論 文 審 査 委 員 会
主 査: 明 愛 国 教 授
委 員: 田 中 一 男 教 授
委 員: 内 田 雅 文 教 授
委 員: 小 泉 憲 裕 准 教 授
委 員: 田 中 基 康 准 教 授
有田 輝
2019
Hikaru Arita Abstract
To practically use a humanoid in complex environments, such as disaster scenes or human’s living environments, it is necessary to improve the performance of now bipedal walking robots.
For walking on uneven terrain in such the complex environment, it is necessary to generate a walking trajectory based on information of the terrain which is obtained by external sensors for a humanoid. In this dissertation, we propose a new trajectory generation method to walk across such uneven terrain by using proximity sensors on the bottom of feet.
This dissertation consists of six chapters. In Chapter 1, we describe why we develop the walking trajectory generation method using the proximity sensors to improve the walking per- formance on the uneven terrain. Vision sensors are mostly used to obtain the information of terrain, but with some limitations which influence the performance of the walking. To solve the problems of vision sensors, proximity sensors have been proposed and developed. However, no work for trajectory generation on uneven terrain with proximity sensors can be found. It motivates the work of this dissertation. In Chapter 2, we propose “relative angle between the sole and ground” and “relative distance between the sole and ground” as proximity information to generate a trajectory. To obtain the information, we show net-structure proximity sensor. As
an example of the trajectory generation using the information, we demonstrate an experiment of motion to prevent a hobby-size humanoid from falling down. In Chapter 3, we introduce a partial-circular foot which has high compatibility with proposed proximity information. To use the partial-circular foot for a trajectory generation, we propose a virtual-wheel-model (VWM).
VWM can achieve a high-efficiency walking by imitating virtual-wheel motion. In Chapter 4, we propose a trajectory generation method for walking on an uneven terrain based on VWM.
To generate the trajectory, we use a shaft position of the virtual-wheel and a rolling angle of it. What we use these can simply generate the trajectory with the proximity information. In Chapter 5, we show a virtual-wheel-walking for uneven terrain (VWWU). VWWU can achieve a high-efficiency walking on even terrain and walk across uneven terrain. Additionally, the gait transition is generated smoothly. In Chapter 6, we present the conclusion and future work.
る た め に ,二 足 歩 行 制 御 の 性 能 向 上 が 求 め ら れ て い る .上 記 の 環 境 の よ う に 地 面 の 傾 斜 や 高 さ が 様 々 な 環 境 で 歩 行 す る 場 合 に は 外 界 セ ン サ に よ っ て 地 形 情 報 を 取 得 し ,地 形 に 合 わ せ た 歩 行 運 動 計 画 を 行 う 必 要 が あ る .こ れ に 対 し 本 論 文 で は , ヒ ュ ー マ ノ イ ド の 足 裏 に 近 接 覚 を 実 装 し ,こ れ に よ っ て 得 ら れ る 近 接 覚 情 報 を 制 御 サ イ ク ル 毎 に 用 い る こ と で 地 形 変 化 に 対 応 す る 歩 行 軌 道 計 画 手 法 を 提 案 す る .
本 論 文 は 全6章 か ら 構 成 さ れ ,そ の 内 容 の 要 旨 は 以 下 の 通 り で あ る .
第1章 序 論
第1章 で は ま ず ,二 足 歩 行 制 御 の 性 能 向 上 の 需 要 と そ の 難 し さ に つ い て 論 じ る . 次 に こ れ ま で の 二 足 歩 行 制 御 に 関 す る 研 究 を 脚 軌 道 計 画 に 注 目 し て2つ に 分 類 し ,そ れ ぞ れ に つ い て 述 べ る .続 い て 本 論 文 で 対 象 と す る 大 き な 地 形 変 化 に 対 し て は 外 界 セ ン サ を 用 い た 歩 行 軌 道 計 画 が 有 効 で あ る こ と を 述 べ ,こ れ ま で の 外 界 セ ン サ と し て 画 像 セ ン サ や レ ー ザ ー レ ン ジ フ ァ イ ン ダ と い っ た 視 覚 セ ン サ が 用 い ら れ て き た こ と を 紹 介 す る .そ の 後 ,視 覚 セ ン サ の 欠 点 と そ れ ら が 招 く 歩 行 性 能 の 低 下 に つ い て 述 べ ,視 覚 セ ン サ の 欠 点 を 補 う セ ン サ と し て 近 接 覚 セ ン サ が 研 究 さ れ て い る こ と を 述 べ る .そ し て 近 接 覚 セ ン サ を 用 い て 地 形 変 化 に 対 応 す る 軌 道 計 画 に 関 し て 研 究 が 行 わ れ て い な い こ と に 言 及 し ,本 論 文 の 目 的 を 述 べ る .最 後 に 歩 行 軌 道 計 画 を 三 要 素 に 分 け ,こ れ を 基 に 本 論 文 の 構 成 を 示 す .
第2章 地 形 変 化 対 応 の た め の 足 裏 近 接 覚 情 報
第2章 で は ,地 形 変 化 に 対 応 す る た め の 足 裏 近 接 覚 情 報 と し て ,“足 裏 と 地 面 の 相 対 角 度”と“足 裏 と 地 面 の 相 対 距 離”を 提 案 す る .ま ず 提 案 す る 足 裏 近 接 覚 情 報 の 基 本 的 な 活 用 方 法 に つ い て 述 べ ,次 に こ れ ら を 取 得 可 能 な 近 接 覚 セ ン サ と し て ネ ッ ト 状 近 接 覚 セ ン サ に つ い て 述 べ る .続 い て 提 案 す る 足 裏 近 接 覚 情 報 を 用 い た 実 時 間 軌 道 計 画 に よ る 地 形 変 化 対 応 の ケ ー ス ス タ デ ィ と し て ,ホ ビ ー サ イ ズ の ヒ ュ ー マ ノ イ ド を 用 い た 傾 斜 未 知 の 上 り 坂 に 対 す る 転 倒 防 止 動 作 実 験 を 行 う .
つ い て 述 べ ,円 弧 足 を 用 い た 従 来 の 歩 行 研 究 が 脚 軌 道 計 画 に 不 向 き で あ る こ と に 言 及 す る .次 に 円 弧 足 を 用 い た 単 質 点 モ デ ル で あ る 仮 想 車 輪 モ デ ル を 提 案 し ,仮 想 的 な 車 輪 に よ る 重 心 運 動 を 模 す る 整 地 上 で の 軌 道 計 画 に つ い て 述 べ る .続 い て 円 弧 足 を 適 切 に 設 計 す る こ と に よ っ て ,姿 勢 の 傾 き に 対 し て 安 定 化 制 御 な し に 復 帰 す る 系 に で き る こ と を 示 す .最 後 に 多 質 点 モ デ ル を 用 い た 物 理 シ ミ ュ レ ー シ ョ ン に よ っ て ,提 案 す る 軌 道 計 画 に よ る 歩 行 と 基 本 的 な 静 歩 行 ,動 歩 行 を 比 較 し , そ の 姿 勢 安 定 性 や エ ネ ル ギ ー 損 失 を 評 価 す る .
第4章 足 裏 近 接 覚 を 用 い た 地 形 変 化 対 応 時 の 実 時 間 軌 道 計 画
第4章 で は ,第3章 で 提 案 す る 仮 想 車 輪 モ デ ル を 基 盤 と し て ,足 裏 の 近 接 覚 セ ン サ を 用 い た 地 形 変 化 対 応 時 の 軌 道 計 画 を 提 案 す る .着 地 時 の 状 態 や タ イ ミ ン グ を 陽 に 扱 う た め に ,ジ ャ ー ク 最 小 軌 道 計 算 を 利 用 し た 制 御 サ イ ク ル 毎 の 軌 道 計 画 に つ い て 説 明 す る .ま た 仮 想 車 輪 の 車 軸 の 位 置 と 回 転 角 度 を 扱 う こ と で ,足 裏 近 接 覚 情 報 を 簡 潔 に 用 い た 軌 道 計 画 が 可 能 に な る こ と を 示 す .最 後 に シ ミ ュ レ ー タ を 用 い て ,提 案 す る 地 形 変 化 対 応 時 の 軌 道 計 画 に よ っ て 上 り 下 り が 混 在 し た 不 連 続 な 斜 面 を 踏 破 可 能 で あ る こ と を 示 す .
第5章 整 地/地 形 変 化 に 適 応 す る 実 時 間 歩 行 軌 道 計 画 の 統 合
第5章 で は ,第3章 で 示 し た エ ネ ル ギ ー 損 失 が 少 な い 整 地 歩 行 軌 道 計 画 と 第4章 で 示 し た 地 形 変 化 対 応 時 の 軌 道 計 画 を 統 合 す る こ と で 地 形 に 応 じ て 歩 容 を 変 化 さ せ る 軌 道 計 画 を 提 案 す る .第3章 と 第4章 で 仮 想 車 輪 モ デ ル を 基 盤 と し た こ と で , こ れ ら の 統 合 が 容 易 に 実 現 さ れ る こ と を 説 明 す る .第4章 と 同 様 の シ ミ ュ レ ー タ を 用 い て ,整 地 歩 行 軌 道 と 地 形 変 化 対 応 時 の 軌 道 を 滑 ら か に 切 り 替 え つ つ 不 連 続 な 斜 面 の 踏 破 が 実 現 さ れ る こ と を 示 す .最 後 に 多 質 点 モ デ ル を 用 い た 物 理 シ ミ ュ レ ー シ ョ ン に よ っ て ,地 形 変 化 対 応 を 行 っ て も そ の 間 で 実 行 さ れ る 整 地 歩 行 の エ ネ ル ギ ー 損 失 が 少 な い こ と を 示 す .
第6章 結 論 と 今 後 の 展 望
第6章 で は ,本 研 究 の 成 果 ,結 論 を ま と め ,今 後 の 課 題 ,展 望 に つ い て 述 べ る .
目 次
1 序 論 1
1.1 背 景 . . . . 1
1.2 研 究 目 的 . . . . 6
1.3 論 文 構 成 . . . . 6
2 地 形 変 化 対 応 の た め の 足 裏 近 接 覚 情 報 9 2.1 概 要 . . . . 9
2.2 地 形 変 化 対 応 に 用 い る 足 裏 近 接 覚 情 報 の 提 案 . . . . 10
2.3 NSPSに よ る 相 対 角 度 と 相 対 距 離 の 検 出 . . . . 11
2.3.1 基 本 構 成 と 検 出 原 理 . . . . 11
2.3.2 2次 元NSPS. . . . 15
2.4 ケ ー ス ス タ デ ィ:転 倒 防 止. . . . 16
2.4.1 概 要 . . . . 16
2.4.2 平 板 足 裏NSPSの 設 計 方 法 . . . . 17
2.4.3 足 裏NSPSの 試 作 と 評 価. . . . 26
2.4.4 転 倒 を 防 止 す る 軌 道 計 画 . . . . 32
2.4.5 転 倒 防 止 動 作 実 験 . . . . 37
2.5 ま と め . . . . 43
3 円 弧 足 を 用 い た 仮 想 車 輪 モ デ ル の 提 案 と 整 地 歩 行 軌 道 計 画 45 3.1 概 要 . . . . 45
3.2 円 弧 足 の 導 入 . . . . 45
3.2.1 円 弧 足 と 足 裏 近 接 覚 情 報 の 関 係 . . . . 45
3.2.2 円 弧 足 を 用 い た 関 連 研 究 . . . . 47
3.3 仮 想 車 輪 モ デ ル の 提 案 と 整 地 歩 行 時 の 特 徴 . . . . 48
3.3.1 仮 想 車 輪 モ デ ル を 用 い た 整 地 歩 行 軌 道 計 画 手 法. . . . 48
3.3.2 一 般 的 な 低 次 元 モ デ ル と の 比 較 . . . . 51
3.4 円 弧 足 を 利 用 し た 姿 勢 安 定 化. . . . 52
3.5 単 質 点 モ デ ル に お け る 整 地 歩 行 の ま と め . . . . 57
3.6 多 質 点 モ デ ル を 用 い た シ ミ ュ レ ー シ ョ ン . . . . 58
3.6.1 姿 勢 安 定 性 の 評 価 . . . . 60
3.6.2 エ ネ ル ギ ー 損 失 の 評 価 . . . . 65
3.7 ま と め . . . . 68
4 足 裏 近 接 覚 を 用 い た 地 形 変 化 対 応 時 の 実 時 間 軌 道 計 画 69 4.1 概 要 . . . . 69
4.2 片 脚 支 持 モ ー ド と 両 脚 支 持 モ ー ド . . . . 71
4.3 ジ ャ ー ク 最 小 軌 道 . . . . 73
4.4 仮 想 車 軸 位 置 を 陽 に 用 い た 仮 想 車 輪 モ デ ル . . . . 73
4.5 仮 想 車 輪 と 足 裏 近 接 覚 情 報 の 関 係 . . . . 75
4.6 片 脚 支 持 モ ー ド の 軌 道 計 画 . . . . 77
4.6.1 支 持 脚 軌 道 計 画 . . . . 77
4.6.2 遊 脚 軌 道 計 画 . . . . 79
4.7 両 脚 支 持 モ ー ド の 軌 道 計 画 . . . . 83
4.8 地 形 変 化 対 応 用 歩 行 軌 道 計 画 シ ミ ュ レ ー シ ョ ン . . . . 86
4.8.1 平 地 か ら 上 り 坂 へ の 対 応 . . . . 88
4.8.2 平 地 か ら 下 り 坂 へ の 対 応 . . . . 91
4.8.3 上 り 下 り を 混 在 さ せ た 地 形 へ の 対 応 . . . . 94
4.9 ま と め . . . . 98
5 整 地/地 形 変 化 に 適 応 す る 実 時 間 歩 行 軌 道 計 画 の 統 合 101 5.1 概 要 . . . . 101
5.2 整 地 歩 行 時 の 遊 脚 の 終 端 状 態. . . . 102
5.3 地 形 変 化 対 応 仮 想 車 輪 歩 行 の フ ロ ー チ ャ ー ト . . . . 102
5.4 地 形 変 化 対 応 仮 想 車 輪 歩 行 の 軌 道 計 画 シ ミ ュ レ ー シ ョ ン . . . . 104
5.4.1 上 り 坂 対 応 軌 道 か ら 整 地 歩 行 軌 道 へ の 遷 移. . . . 104
5.4.2 下 り 坂 対 応 軌 道 か ら 整 地 歩 行 軌 道 へ の 遷 移. . . . 104
5.4.3 傾 斜 が ラ ン ダ ム な 地 形 に 応 じ た 軌 道 計 画 . . . . 104
5.5 地 形 変 化 対 応 仮 想 車 輪 歩 行 の 物 理 シ ミ ュ レ ー シ ョ ン . . . . 110
5.6 ま と め . . . . 114
6 結 論 と 今 後 の 展 望 115 6.1 本 研 究 に よ る 成 果 . . . . 115
6.2 今 後 の 展 望 . . . . 117
6.2.1 安 定 化 制 御 の 導 入 . . . . 117
6.2.2 支 持 脚 側 の 足 裏 近 接 覚 情 報 を 用 い た 軌 道 計 画 手 法 の 開 発 117 6.2.3 円 弧 足 型 ネ ッ ト 状 近 接 覚 セ ン サ の 開 発 . . . . 117
6.2.4 ロ ボ ッ ト シ ミ ュ レ ー タ へ の 光 学 計 算 の 導 入. . . . 118
謝 辞 119
図 目 次
1.1 Research construction . . . . 7
2.1 Terrain estimations . . . . 11
2.2 Conceptual scheme of NSPS . . . . 13
2.3 The circuit of optical one-dimensional NSPS . . . . 14
2.4 Outputs of NSPS . . . . 14
2.5 The circuit of optical two-dimensional NSPS . . . . 15
2.6 The overview of the case study . . . . 16
2.7 The relation between insensible field and optical characteristics . . . . 17
2.8 Definition of the design parameters for arrangements . . . . 21
2.9 Parallel connection of detection elements . . . . 23
2.10 The sensitivity of relative angle output is improved by parallel connection . . . 24
2.11 Consideration for the focal distance . . . . 25
2.12 The fabricated sensor for experiments . . . . 27
2.13 The experimental results while roll rotaion . . . . 29
2.14 The experimental results while pitch rotaion . . . . 30
2.15 The experimental results while changing the distance . . . . 31
2.16 The relation between ZMP and motion . . . . 32
2.17 The reaction force(F) when the swing leg hits against ground . . . . 33
2.18 The impact force(Fi) when the swing leg hits against ground . . . . 36
2.19 ZMP when the swing leg hits against ground . . . . 36
2.20 The experiment conditions . . . . 39
2.21 The experimental results ofψ . . . . 40
2.22 The experimental result of posture . . . . 40
2.23 The robot preventing from falling down . . . . 41
2.24 The robot adjusting ankle roll and pitch joint. . . . 42
3.1 The relation between partial-circular foot and proximity information . . . . . 46
3.2 Virtual Wheel Model . . . . 48
3.3 Switching support leg . . . . 51
3.4 Simplified virtual wheel model . . . . 53
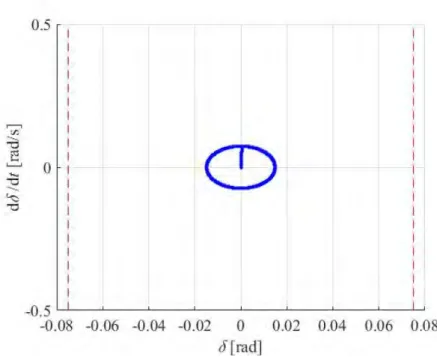
3.5 Phase portrait of the simplified virtual wheel model . . . . 56
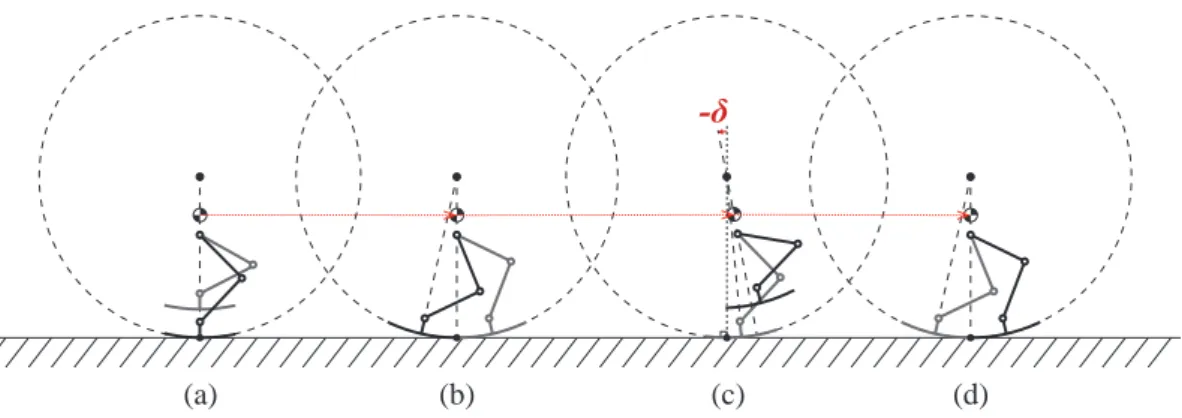
3.6 (a) to (b): The mass motion becomes linear uniform motion by proposed leg’s trajectory. (b) to (c): The posture error is caused due to some external forces. (c) to (d): The robot recovers by the effect of the partial-circular foot. . . . . . 57
3.7 Walking based on virtual wheel . . . . 60
3.8 δ for proposed walking (Rs=0.8 m,T =1.4 s) . . . . 61
3.9 δ for static walking (T =1.4 s) . . . . 63
3.10 δ for dynamic walking (T =1.4 s) . . . . 63
3.11 δ for proposed walking (Rs=0.6 m,T =1.4 s) . . . . 64
3.12 δ for proposed walking (Rs=1.0 m,T =1.4 s) . . . . 64
4.1 Single-leg supporting mode and Double-leg supporting mode . . . . 72
4.2 The relation between two supporting mode and walking cycleTwalk . . . . 72
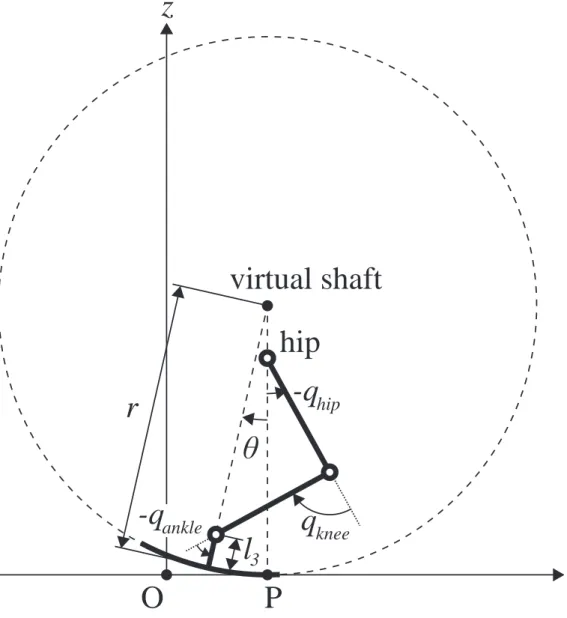
4.3 Position of virtual shaft from hip joint . . . . 74
4.4 Coordinate of sensor output . . . . 76
4.5 Terminal state of support leg . . . . 77
4.6 Terminal state of the latter half of swing leg . . . . 80
4.7 Terminal state of the first half of swing leg . . . . 82
4.8 Terminal state of new support leg . . . . 83
4.9 Link parameters in the simulation of trajectory generations . . . . 87
4.10 Foot proximity sensor used in this simulation . . . . 87
4.11 Walking for Uneven Terrain (WUT) on upslope (-10 deg) . . . . 89
4.12 Trajectories of the center of foot in WUT simulation on upslope . . . . 89
4.13 The relative angle outputs in WUT simulation on upslope . . . . 90
4.14 The relative distance outputs in WUT simulation on upslope. . . . 90
4.15 Walking for Uneven Terrain (WUT) on downslope (10 deg) . . . . 92
4.16 Trajectories of the center of foot in WUT simulation on downslope . . . . 92
4.17 The relative angle outputs in WUT simulation on downslope . . . . 93
4.18 The relative distance outputs in WUT simulation on downslope . . . . 93
4.19 Walking for Uneven Terrain (WUT) on random slopes . . . . 95
4.20 Trajectories of the center of foot in WUT simulation on random slopes . . . . 95
4.21 The relative angle outputs in WUT simulation on random slopes. . . . 96
4.22 The relative distance outputs in WUT simulation on random slopes . . . . 96
4.23 Estimated ground on convex ground in this simulation . . . . 97
4.24 Estimated ground on convex ground by NSPS . . . . 97
5.1 Flow chart of Virtual Wheel Walking for Even & Uneven terrain (VWWU) . . 103
5.2 Virtual Wheel Walking for Even & Uneven terrain (VWWU) on upslope (-10 deg)105 5.3 Trajectory of the hip joint in VWWU simulation on upslope . . . . 105
5.4 The relative angle outputs in VWWU simulation on upslope . . . . 106
5.5 The relative distance outputs in VWWU simulation on upslope . . . . 106
5.6 Virtual Wheel Walking for Even & Uneven terrain (VWWU) on downslope (10 deg)107 5.7 Trajectory of the hip joint in VWWU simulation on downslope . . . . 107
5.8 The relative angle outputs in VWWU simulation on downslope . . . . 108
5.9 The relative distance outpus in VWWU simulation on downslope . . . . 108
5.10 Virtual Wheel Walking for Even & Uneven terrain (VWWU) on random slopes 109 5.11 Trajectory of the hip joint in VWWU simulation on random slopes . . . . 109
5.12 UVWW in physical simulation (±10 deg) . . . . 111
5.13 Trajectory of the hip joint in physical simulation (±10 deg) . . . . 111
5.14 UVWW in physical simulation (±5 deg) . . . . 111
5.15 Trajectory of the hip joint in physical simulation (±5 deg) . . . . 111
5.16 CoT for each steps (±10 deg) . . . . 113
5.17 CoT for each steps (±5 deg) . . . . 113
表 目 次
2.1 The design parameters . . . . 27
3.1 The robot model parameters . . . . 59
3.2 CoT comparison (Proposed walking vs Dynamic walking) . . . . 65
3.3 CoT comparison at Right legT =1.0 s vsT =1.8 s (Rs=0.8 m,t=20∼50 s) 67 3.4 CoT comparison at all joints during swing phase in Table.3.3 . . . . 67
3.5 CoT comparisonRs=0.6 m vsRs=1.0 m (T =1.8 s,t=20∼50 s) . . . . 68
4.1 Control parameters . . . . 86
5.1 Control parameters in physical simulation . . . . 112
5.2 Average value of the CoT for each set (10 deg). . . . 112
5.3 Average value of the CoT for each set (5 deg) . . . . 112
第 1 章 序論
1.1 背 景
ヒ ト が 行 う 諸 作 業 を 代 行 さ せ る た め ,ヒ ュ ー マ ノ イ ド の 実 用 化 が 待 ち 望 ま れ て い る .ヒ ュ ー マ ノ イ ド は ヒ ト を 模 し た ロ ボ ッ ト の こ と で あ り ,特 に 本 論 文 中 で は2本 の 腕 を 持 ち ,2本 の 脚 で の 歩 行 移 動 が 可 能 な ロ ボ ッ ト を 指 す .二 足 歩 行 は 車 輪 移 動 な ど の 他 の 移 動 形 態 と 比 較 し て ,離 散 的 な 地 形 へ の 対 応 可 能 性 が 高 く ,か つ 対 地 投 影 面 積 の 小 さ さ か ら 狭 窄 環 境 へ の 適 応 性 が 高 い と い う 特 徴 を 持 つ .こ の よ う な 特 徴 か ら 災 害 現 場 や ヒ ト の 居 住 環 境 内 で の 利 用 が 期 待 さ れ て お り ,実 際 に 災 害 現 場 で の 活 動 を 想 定 し た ロ ボ ッ ト 競 技 会 で あ るDARPA Robotics Challenge[1]で は ,主 催 側 か ら の 指 定 が な か っ た に も 関 わ ら ず 多 く の チ ー ム が 二 足 歩 行 を 採 用 し て い た .し か し 二 足 歩 行 に つ い て は こ れ ま で に 様 々 な 研 究 が 行 わ れ て き た に も 関 わ ら ず ,未 だ ヒ ト と 比 べ て そ の 性 能 は 低 く ,ヒ ュ ー マ ノ イ ド 実 用 化 の ボ ト ル ネ ッ ク と な っ て い る .
こ こ で 二 足 歩 行 制 御 を 取 り 上 げ て そ の 難 し さ に つ い て 考 え る .山 本 は 文 献[2]の 冒 頭 で ,歩 行 制 御 の 難 し さ の 理 由 と し て 以 下 の5点 を 挙 げ て い る .
(1) 多 自 由 度 系 で あ る (2) 非 線 形 な 力 学 を 有 す る (3) 劣 駆 動 浮 遊 リ ン ク 系 で あ る (4) 接 触 力 に 拘 束 条 件 が 存 在 す る
(5) 構 造 可 変 系 で あ り 接 触 力 の 拘 束 条 件 が 不 連 続 に 変 化 す る
(3)に あ る よ う に 二 足 歩 行 を 行 う 系 は マ ニ ピ ュ レ ー タ と 異 な り ,基 盤 が 地 面 に 固 定 さ れ て い な い .さ ら に 二 足 歩 行 の 持 つ 対 地 投 影 面 積 が 小 さ い と い う 特 徴 を 活 か す た め に そ の 支 持 面 と な る 足 裏 は 小 さ く 設 計 さ れ る こ と が 多 く ,そ の 結 果 と し て 転 倒 を 起 こ し や す い 系 と な る .ま た(4),(5)に あ る よ う に 地 面 と 接 触 す る 足 裏 の 接 触 状 態 あ る い は 動 作 が 不 適 切 で あ る 場 合 ,接 触 力 の 拘 束 条 件 を 満 た せ ず に 足 裏 が 地 面 か ら 剥 離 す る こ と で 容 易 に 転 倒 す る . こ れ に 加 え て(1),(2)の 理 由 か ら 制 御 系 が 複 雑 な も の と な り や す い .(1)に 対 し て は ヒ ュ ー マ ノ イ ド を 倒 立 振 子 モ デ ル(IPM)な ど の 低 次 元 モ デ ル へ と 近 似 す る こ と で 対 処 し ,(2)に 対 し て は さ ら にIPMの ダ イ ナ ミ ク ス を 線 形 化 し た 線 形 倒 立 振 子 モ デ ル(LIPM)[3]を 用 い て 対 処 す る 方 法 が よ く 用 い ら れ る .
こ の よ う な 難 し さ に 対 し て 行 わ れ て き た 二 足 歩 行 制 御 の 研 究 は「 制 御・
軌 道 計 画 指 向 」と「 身 体・機 械・物 理 系 の 自 己 安 定 指 向 」と に 分 類 で き る[4]. 前 者 は 脚 軌 道 を 陽 に 計 画 す る も の で あ り ,そ の 代 表 と し てZMP(Zero Moment Point)[5]を 規 範 と し た 制 御 が あ る[6, 7, 8, 9, 10].後 者 は 脚 軌 道 を 陽 に 計 画 せ ず に ヒ ュ ー マ ノ イ ド の も つ ダ イ ナ ミ ク ス と 環 境 の 相 互 作 用 を 利 用 す る 手 法 で あ り ,受 動 歩 行[12]お よ び そ れ を 基 に し た 準 受 動 歩 行 が 代 表 的 で あ る[16, 17, 18, 19].
前 者 に つ い て 述 べ る .ZMPはVukobratovi´cら の 文 献[5]で 提 案 さ れ た 姿 勢 安 定 性 の 指 標 で あ り ,接 触 点 が 同 一 平 面 内 に あ る 場 合 に お い て は 地 面 反 力 の 圧 力 中 心 と 同 義 で あ る .こ のZMPが 支 持 多 角 形( 足 裏 と 地 面 の 接 触 点 集 合 が 作 る 凸 包 )の 内 側 に あ れ ば ,地 面 か ら の 反 力 は 重 心 に 対 し て モ ー メ ン ト を 発 生 さ せ な い た め ,重 心 は 並 進 移 動 の み を 行 う .ZMPが 支 持 多 角 形 の 縁 に 位 置 す る 場 合 は 縁 を 支 点 と し た 回 転 運 動 が 生 じ る た め ,足 裏 が 地 面 か ら 剥 離 し て 転 倒 へ と 至 る .ZMPを 規 範 と し た 制 御 で は ,LIPMな ど の 低 次 元 モ デ ル で 表 さ れ た 力 学 系 に 対 し てZMPが 常 に 支 持 多 角 形 の 内 側 に 収 ま る よ う に 軌 道 計 画 を 行 う .軌 道 計 画 時 に 支 持 多 角 形 の 縁 か らZMPま で の 距 離 に 余 裕 を 持 た せ る こ と が で き れ ば ,外 乱 等 に よ り 目 標 軌 道 か ら 外 れ て し ま っ て も , 拘 束 条 件 を 満 た す 接 触 力 を 発 生 さ せ る こ と で 復 帰 す る こ と が で き る .な お , 多 く の 場 合 ,目 標 軌 道 の 計 画 と ,外 乱 等 に よ る 目 標 軌 道 か ら の 逸 脱 か ら 復 帰 す る た め の 安 定 化 は 陽 に 分 離 し て 扱 わ れ る .田 崎 の 文 献[11]の 冒 頭 で は ,目 標 軌 道 計 画 は 更 に3つ に 分 類 で き る と あ る が ,こ れ に つ い て は 後 に 触 れ る .
一 方 で 脚 軌 道 を 陽 に 用 い な い 後 者 は ,McGeerの 文 献[12]に て 報 告 さ れ た 受 動 歩 行 が ベ ー ス と な っ て い る .受 動 歩 行 は ア ク チ ュ エ ー タ も 制 御 系 も 持 た な い 歩 行 器 を 適 切 に 設 計 す る こ と に よ っ て ,一 定 傾 斜 の 下 り 坂 を 重 力 の 影 響 の み で 自 然 に 歩 行 す る 動 作 で あ る .こ の 時 の 歩 行 器 は 支 持 脚 をIPM,遊 脚 を 振 り 子 に 見 立 て た モ デ ル と 考 え ら れ ,両 脚 を 合 わ せ て コ ン パ ス モ デ ル と も 呼 ば れ る .坂 を 下 る こ と に よ っ て ポ テ ン シ ャ ル エ ネ ル ギ ー か ら 変 換 さ れ た 運 動 エ ネ ル ギ ー が 支 持 脚 切 替 時 の 地 面 と の 衝 突 に よ っ て 散 逸 す る エ ネ ル ギ ー と 等 し く な る こ と が 分 か っ て お り[13],こ れ に よ っ て 歩 行 器 は 保 存 系 と な っ て 周 期 的 な 運 動 を 行 う .さ ら に こ の 周 期 的 な 軌 道 が 安 定 な リ ミ ッ ト サ イ ク ル と な る よ う に 歩 行 器 を 設 計 す る こ と に よ っ て ,あ る 程 度 の 外 乱 を 受 け て も 定 常 歩 行 へ と 復 帰 す る 系 と す る こ と が で き る .こ う し て 実 現 さ れ る 受 動 歩 行 は 緩 や か な 斜 面 を 下 る こ と に よ る 僅 か な ポ テ ン シ ャ ル エ ネ ル ギ ー の 供 給 に よ っ て 歩 行 を 継 続 で き る こ と か ら ,エ ネ ル ギ ー 効 率 が 良 い こ と で 知 ら れ て い る .準 受 動 歩 行 は 下 り 坂 で 発 現 す る 受 動 歩 行 を 平 地 や 上 り 坂 で も 実 行 す る た め に ,ア ク チ ュ エ ー タ を 追 加 し て エ ネ ル ギ ー を 供 給 す る こ と で 歩 行 す る 手 法 で あ る .エ ネ ル ギ ー の 供 給 方 法 と し て は 支 持 脚 離 地 の 際 に 足 首 を 伸 展 す る よ う に 蹴 る 方 法[17],仮 想 的 な 重 力 に 基 づ く ト ル ク 入 力 を 行 う 方 法[19]な ど が あ り ,ア ク チ ュ エ ー タ を 追 加 し て も な お エ ネ ル ギ ー 効 率 が 高 い[16].
本 研 究 で は ,災 害 現 場 や ヒ ト の 居 住 環 境 の よ う な 複 雑 な 環 境 に お け る 二 足 歩 行 制 御 に つ い て 考 え る .こ の よ う な 場 合 ,地 形 は ヒ ュ ー マ ノ イ ド か ら 見 て 一 定 で は な く ,不 規 則 に 変 化 す る 未 知 の 不 整 地 で あ る .不 整 地 に は 斜 面 や 段 差 が 混 在 す る 場 合 と ,砂 地 や 雪 道 の よ う な 加 重 に よ り 地 形 が 変 形 す る 場 合 と が あ る .本 研 究 で は 前 者 の よ う に 様 々 な 傾 斜 や 高 さ の 面 が 組 み 合 わ さ れ た 地 形 を 対 象 と し ,傾 斜 や 高 さ が 変 化 す る こ と を「 地 形 変 化 」と 呼 ぶ .
地 形 変 化 が あ る 程 度 小 さ い 場 合 は ,平 地 を 想 定 し た 歩 行 の ま ま 不 整 地 へ と 進 入 し ,地 形 変 化 に よ る 影 響 を 外 乱 と 捉 え てZMPの 位 置 調 整 や リ ミ ッ ト サ イ ク ル の 引 き 込 み に 基 づ く 安 定 化 に よ っ て 復 帰 し つ つ 歩 行 を 継 続 す る こ と が で き る .し か し(4)に 挙 げ ら れ た 理 由 か ら 接 触 力 は 制 限 さ れ て い る た め , 安 定 化 に は 限 界 が 存 在 す る .そ の た め 限 界 を 超 え る 外 乱 が 生 じ る ほ ど 大 き
な 地 形 変 化 に は ,外 乱 が 生 じ る 以 前 に 軌 道 を 修 正 し て 対 応 す る 必 要 が あ る . し た が っ て ,本 研 究 で 想 定 す る よ う な 不 整 地 に お け る 歩 行 で は ,脚 軌 道 を 陽 に 用 い る「 制 御・軌 道 計 画 指 向 」の 手 法 に 地 形 変 化 に 伴 う 目 標 軌 道 の 修 正 を 追 加 す る 必 要 が あ る.
未 知 の 不 整 地 に 対 し て 目 標 軌 道 の 修 正 を 行 う た め に は ,地 形 情 報 取 得 の た め の 外 界 セ ン サ が 必 要 と な る .従 来 は 外 界 セ ン サ と し て 画 像 セ ン サ や レ ー ザ ー レ ン ジ セ ン サ が 用 い ら れ て い た[23, 24].し か し ,こ れ ら の 外 界 セ ン サ に は 大 き く3つ の 欠 点 が 存 在 す る .1つ 目 は 死 角 が 存 在 す る こ と で あ る .足 裏 と 地 面 の 接 近 に 伴 い ,自 身 の 脚 が セ ン サ と 地 面 の 間 に 存 在 す る 姿 勢 と な り , 情 報 取 得 が 不 可 能 と な る .こ の 死 角 を 可 能 な 限 り 生 じ さ せ な い た め に セ ン サ は 頭 部 や 腰 部 な ど の 高 い 位 置 に 取 り 付 け ら れ ,広 範 囲 の 地 形 情 報 を 取 得 す る が ,こ の こ と が 以 下2つ の 問 題 を 助 長 す る .2つ 目 は 足 裏 と 地 面 の 相 対 関 係 を 直 接 取 得 で き な い こ と で あ る .先 述 の 通 り 不 整 地 に 対 応 す る 際 に 重 要 と な る の は 足 裏 と 地 面 の 接 触 状 態 で あ る .し か し1つ 目 の 問 題 に よ っ て セ ン サ は 頭 部 や 腰 部 に 取 り 付 け ら れ る た め ,地 面 と 足 裏 の 相 対 関 係 は 地 面 と セ ン サ の 相 対 関 係 ,セ ン サ と 足 裏 の 相 対 関 係 を 介 し て 求 め ら れ る .地 面 と セ ン サ の 相 対 関 係 に は セ ン サ の 測 定 誤 差 が 含 ま れ ,セ ン サ と 足 裏 の 相 対 関 係 で は 制 御 遅 れ や モ デ ル 化 誤 差 な ど が 含 ま れ る た め ,求 め ら れ る 地 面 と 足 裏 の 相 対 関 係 に は こ れ ら が 足 し 合 わ さ れ た 大 き な 誤 差 が 生 じ や す い .3 つ 目 は 応 答 周 期 が 長 い こ と で あ る .一 般 的 に 上 記 の セ ン サ の 応 答 周 期 が 制 御 周 期 の10倍 程 度 の 長 さ で あ る こ と に 加 え ,1つ 目 の 問 題 に よ っ て セ ン サ は 広 範 囲 の 地 形 情 報 を 取 得 す る 必 要 が あ る こ と か ら 膨 大 な 情 報 を 処 理 す る 時 間 を 要 す る .
こ れ ら の 欠 点 を 避 け る た め ,未 知 の 不 整 地 を 歩 行 す る 場 合 に は 適 宜 歩 行 速 度 を 低 下 さ せ て 情 報 取 得・処 理 の 時 間 を 設 け る 必 要 が あ る .そ の た め ヒ ュ ー マ ノ イ ド は 不 要 な 減 速 を 余 儀 無 く さ れ ,地 形 変 化 対 応 に 要 す る 時 間 が 長 く な る 上 ,加 減 速 に よ る エ ネ ル ギ ー 損 失 が 増 加 す る と い っ た 歩 行 性 能 の 低 下 を 招 く .
そ こ で 本 研 究 で は 上 記 の 従 来 の 外 界 セ ン サ が 持 つ 欠 点 を 補 う セ ン サ と し て 近 接 覚 セ ン サ を 導 入 す る .近 接 覚 セ ン サ と は 数 セ ン チ メ ー ト ル 以 内 の 至
近 距 離 を 検 出 範 囲 と す る セ ン サ で あ り ,こ れ ま で に 赤 外 線[25, 26, 27, 28, 29],超 音 波[30],渦 電 流[31],静 電 容 量[32, 33]な ど を 利 用 し た 様 々 な 検 出 方 式 の セ ン サ が 提 案 さ れ て い る .以 降 で は 近 接 覚 セ ン サ と の 対 比 と し て ,従 来 の 外 界 セ ン サ と し て 挙 げ た 画 像 セ ン サ ,レ ー ザ ー レ ン ジ セ ン サ を 総 称 し て「 視 覚 セ ン サ 」と 呼 ぶ .ま た ,近 接 覚 セ ン サ に よ っ て ヒ ュ ー マ ノ イ ド に 与 え ら れ る 感 覚 を「 近 接 覚 」と 呼 び ,近 接 覚 セ ン サ に よ っ て 取 得 さ れ る 情 報 を「 近 接 覚 情 報 」と 呼 ぶ .
近 接 覚 セ ン サ は 視 覚 セ ン サ に 比 べ て 検 出 範 囲 が 狭 い 代 わ り に 小 型 軽 量 か つ 高 速 応 答 が 可 能 で あ る こ と が 多 く ,産 業 分 野 で は こ の 特 長 を 活 か し て 非 接 触 ス イ ッ チ と し て 広 く 用 い ら れ て い る[28, 31].ロ ボ ッ ト 研 究 の 分 野 で は , ロ ボ ッ ト の 体 表 面 に 実 装 す る こ と を 目 的 と し た 薄 型 の 近 接 覚 セ ン サ が 開 発 さ れ て い る[29, 36, 39].こ の よ う に ロ ボ ッ ト 体 表 面 に 近 接 覚 セ ン サ を 実 装 す る こ と で ,任 意 の 体 表 面 か ら 対 象 物 体 ま で の 相 対 位 置 関 係 を 取 得 す る こ と が 可 能 と な り ,視 覚 セ ン サ が 持 つ3つ の 欠 点 の う ち 死 角 と 誤 差 に よ る 点 を 解 決 す る こ と が で き る .
こ れ ま で は 特 に 近 接 覚 セ ン サ を ロ ボ ッ ト ハ ン ド に 実 装 し て 把 持 性 能 を 高 め る 研 究 が 盛 ん に 行 わ れ て き た[34, 35].本 研 究 室 の 過 去 の 研 究 に お い て も , 独 自 に 開 発 し た 近 接 覚 セ ン サ[37]を ロ ボ ッ ト ハ ン ド の 手 掌 部 と 指 先 部 に 実 装 し ,様 々 な 物 体 を 高 速 に 把 持 す る 研 究 が 行 わ れ た[40, 41].研 究 室 独 自 の 近 接 覚 セ ン サ[37, 38]は ネ ッ ト 状 近 接 覚 セ ン サ(NSPS)と 呼 ば れ ,赤 外 光 を 利 用 し た 近 接 覚 セ ン サ の 一 種 で あ る .赤 外 光 検 出 素 子 を 複 数 実 装 し ,そ れ ら を 抵 抗 ネ ッ ト ワ ー ク と 呼 ば れ る 独 自 の ア ナ ロ グ 演 算 回 路 で 結 合 す る 構 成 と な っ て い る . こ の 構 成 に よ り 他 の 近 接 覚 セ ン サ と 比 較 し て ,検 出 素 子 数 に 依 ら ず 応 答 速 度 が 高 速 ,省 配 線 性 に 優 れ る と い っ た 特 徴 を 持 ち ,手 先 や 足 先 な ど の 末 端 へ の 実 装 に 適 し て い る .そ の 応 答 時 間 は ロ ボ ッ ト へ 応 用 さ れ て い る も の で1 ms以 下 ,更 に 高 速 な タ イ プ[39]で は10µs以 下 で あ り ,制 御 周 期 と 同 等 か そ れ 以 上 に 高 速 な セ ン サ が 実 現 さ れ て い る .し た が っ て 視 覚 セ ン サ が 持 つ 応 答 周 期 に 関 す る 欠 点 を 補 う 近 接 覚 セ ン サ と し て 期 待 で き る .
従 来 は 先 述 の よ う に 近 接 覚 セ ン サ を ロ ボ ッ ト ハ ン ド に 実 装 し て 把 持 性 能 を 高 め る 研 究 や ,ア ー ム に 実 装 し て 物 体 と の 衝 突 を 回 避 す る 研 究[29]な ど が
多 く 行 わ れ て き た .そ の 一 方 で 近 接 覚 セ ン サ を ヒ ュ ー マ ノ イ ド の 足 裏 に 実 装 す る 研 究 例 は 非 常 に 少 な い .Guadarrama-Olveraら は 文 献[36]で 力 を 検 出 す る セ ン サ セ ル を 複 数 結 合 す る こ と で 形 成 し た セ ン サ ス キ ン を ヒ ュ ー マ ノ イ ド の 足 裏 に 実 装 し ,得 ら れ る 圧 力 分 布 情 報 か ら 支 持 多 角 形 を 求 め た .使 用 さ れ た セ ン サ セ ル は 光 学 式 の 近 接 セ ン シ ン グ 機 能 を 有 し て お り ,同 文 献 中 で も こ れ を 用 い て 接 触 寸 前 の 先 見 的 な 支 持 多 角 形 の 推 定 を 行 っ た .彼 ら が 支 持 多 角 形 を 求 め た 目 的 は ,例 え ばZMPを 支 持 多 角 形 内 に 収 め つ つ 姿 勢 を 安 定 化 す る よ う な 力 フ ィ ー ド バ ッ ク の 性 能 向 上 で あ る .筆 者 が 調 査 す る 限 り そ の 他 に ヒ ュ ー マ ノ イ ド の 足 裏 に 近 接 覚 セ ン サ を 実 装 し た 研 究 は な く ,し た が っ て 足 裏 の 近 接 覚 セ ン サ を 用 い て 地 形 変 化 に 対 応 す る 軌 道 計 画 を 行 う 研 究 は 試 み ら れ て い な い .
1.2 研 究 目 的
本 研 究 で は ,ヒ ュ ー マ ノ イ ド の 足 裏 に 近 接 覚 を 実 装 し ,こ れ に よ っ て 得 ら れ る 近 接 覚 情 報 を 制 御 サ イ ク ル 毎 に 用 い る こ と で 地 形 変 化 に 対 応 す る 歩 行 軌 道 計 画 手 法 を 提 案 す る .こ れ に よ り 視 覚 セ ン サ の み を 用 い る 場 合 に 必 要 で あ っ た 地 形 情 報 取 得 時 間 確 保 の た め の 減 速 を 除 去 し ,踏 破 時 間 の 短 縮 や エ ネ ル ギ ー 損 失 の 削 減 と い っ た 歩 行 性 能 の 向 上 が 期 待 で き る .以 降 で は , 制 御 サ イ ク ル 毎 の 軌 道 計 画 を「 実 時 間 軌 道 計 画 」と 呼 ぶ こ と に す る .
1.3 論 文 構 成
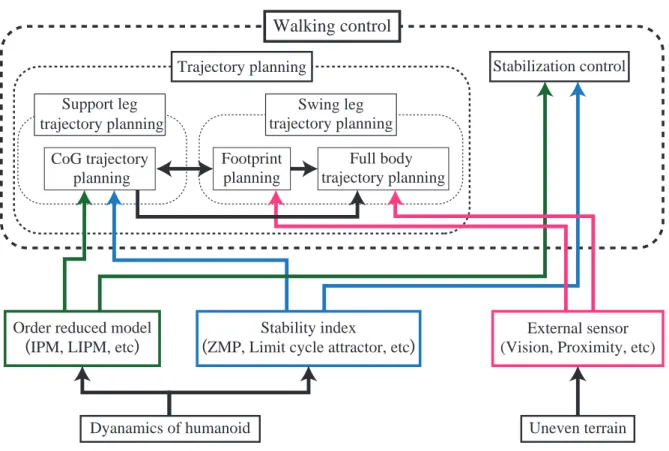
本 論 文 の 構 成 を 説 明 す る た め に ,田 崎 の 文 献[11]を 参 考 に 目 標 軌 道 計 画 を さ ら に 分 類 す る .文 献[11]の 冒 頭 に よ る と ,「 歩 行 運 動 計 画 は 着 地 位 置 計 画 , 重 心 運 動 計 画 お よ び 全 身 運 動 計 画 の 三 要 素 で 構 成 さ れ る .着 地 位 置 計 画 は 路 面 の 状 況 や 運 動 学 的 制 約 を 考 慮 し て 着 地 位 置 の 系 列 を 計 画 す る 部 分 問 題 で あ る .( 中 略 )重 心 運 動 計 画 と は 着 地 位 置 と の 整 合 性 を 考 慮 し て ロ ボ ッ ト の 重 心 お よ び 総 角 運 動 量 の 軌 道 を 計 画 す る 問 題 で あ る .( 中 略 )全 身 運 動 計
Dyanamics of humanoid Uneven terrain External sensor (Vision, Proximity, etc) Stability index
(ZMP, Limit cycle attractor, etc) Order reduced model
(IPM, LIPM, etc)
Walking control Trajectory planning
CoG trajectory planning Support leg trajectory planning
Footprint planning
Full body trajectory planning Swing leg
trajectory planning
Stabilization control
Fig. 1.1 Research construction
画 と は 着 地 位 置 や 重 心 軌 跡 と 整 合 性 の あ る よ う に ロ ボ ッ ト の 全 身 運 動 を 決 定 す る 問 題 で あ る .」と あ る .
こ の 分 類 の 定 義 と こ れ ま で に 述 べ た 内 容 を 筆 者 な り に ま と め ,地 形 変 化 に 対 応 す る 歩 行 制 御 に つ い て 図 解 し た も の をFig.1.1に 示 す .Fig.1.1中 で は 田 崎 の 文 献[11]に よ っ て 分 類 さ れ た 目 標 軌 道 計 画 の 三 要 素 を そ れ ぞ れ 支 持 脚 と 遊 脚 の 軌 道 計 画 に 分 け て い る .厳 密 に は こ の よ う に 明 確 に 切 り 分 け ら れ る も の で は な い が ,そ れ ぞ れ に お い て 支 配 的 な 脚 軌 道 を 示 す こ と で 理 解 の 助 け と な る た め こ の よ う に 図 示 し た .特 に「 全 身 運 動 計 画 」は そ の 名 称 通 り 全 身 の 運 動 に 関 わ る も の で あ る が ,本 論 文 中 の 内 容 で は 主 に 躓 き を 回 避 す る た め の 遊 脚 の 軌 道 計 画 が こ れ に 該 当 す る た め 遊 脚 軌 道 計 画 内 に 示 し た .ま た ,低 次 元 モ デ ル ,安 定 指 標 ,外 界 セ ン サ は 歩 行 運 動 に 影 響 す る 実 物 体 で あ る ヒ ュ ー マ ノ イ ド 本 体 と 地 面 を 制 御 に 取 り 入 れ る た め の 媒 介 と 解 釈 し ,並
べ て 図 示 し て い る .
本 論 文 で 提 案 す る の は 地 形 情 報 を 取 得 す る 外 界 セ ン サ と し て 近 接 覚 セ ン サ を 用 い た 目 標 軌 道 計 画 手 法 で あ る .そ の た めFig.1.1中 の 外 界 セ ン サ か ら 矢 印 が 伸 び る 着 地 位 置 計 画 と 全 身 運 動 計 画( 躓 き 回 避 計 画 )が 研 究 の 主 題 で あ る .し か しFig.1.1に 示 す 通 り こ れ ら は 重 心 運 動 計 画 を 介 し て 低 次 元 モ デ ル や 安 定 指 標 と も 関 連 し て お り ,独 立 し て 議 論 す る こ と は 有 意 で は な い . そ こ で 本 論 文 で は 以 下 の 構 成 に よ っ て 研 究 目 的 を 達 成 す る .
第2章 で は ,地 形 変 化 に 対 応 す る た め に 用 い る 足 裏 近 接 覚 情 報 と し て ,“ 足 裏 と 地 面 の 相 対 角 度”と“足 裏 と 地 面 の 相 対 距 離”の2情 報 を 提 案 す る .こ れ ら が 地 形 変 化 に 対 応 す る 際 に ど の よ う に 利 用 で き る か を 述 べ ,実 際 に2情 報 を 取 得 可 能 な 近 接 覚 セ ン サ と し て ネ ッ ト 状 近 接 覚 セ ン サ を 使 用 で き る こ と を 説 明 す る .さ ら に こ れ ら の 足 裏 近 接 覚 情 報 を 用 い た 実 時 間 軌 道 計 画 に よ る 地 形 変 化 対 応 の ケ ー ス ス タ デ ィ と し て ,傾 斜 未 知 の 上 り 坂 に 対 す る 転 倒 防 止 動 作 の 実 験 を 行 う .
第3章 で は ,ま ず 第2章 で 提 案 す る 足 裏 近 接 覚 情 報 と 相 性 の 良 い 足 部 と し て 円 弧 状 の 足 部 を 導 入 す る .次 に 円 弧 状 の 足 部 を 用 い た 低 次 元 モ デ ル と し て 仮 想 車 輪 モ デ ル を 提 案 し ,本 モ デ ル を 用 い て 計 画 さ れ る 整 地 歩 行 軌 道 が 従 来 の 脚 軌 道 を 陽 に 計 画 す る 方 法 と 比 べ て エ ネ ル ギ ー 損 失 が 少 な い 整 地 歩 行 を 実 現 で き る こ と を 示 す .
第4章 で は ,第3章 で 提 案 す る 仮 想 車 輪 モ デ ル を 基 盤 と し て 足 裏 近 接 覚 を 用 い た 地 形 変 化 対 応 時 の 実 時 間 軌 道 計 画 に つ い て 述 べ る .ジ ャ ー ク 最 小 軌 道 計 算 を 利 用 し て 仮 想 車 輪 の 位 置 と 回 転 の 軌 道 を 計 画 す る こ と に よ り ,足 裏 近 接 覚 情 報 を 簡 潔 に 用 い つ つ 停 止 す る こ と な く 不 連 続 な 斜 面 を 踏 破 す る 軌 道 計 画 が 可 能 で あ る こ と を 示 す .
第5章 で は ,第3章 で 示 す エ ネ ル ギ ー 損 失 が 少 な い 整 地 歩 行 軌 道 計 画 と 第 4章 で 示 す 地 形 変 化 対 応 時 の 実 時 間 軌 道 計 画 を 統 合 し ,地 形 に 応 じ て 適 切 に 歩 容 を 変 化 さ せ る 実 時 間 軌 道 計 画 に つ い て 述 べ る .仮 想 車 輪 モ デ ル を 統 一 し た 基 盤 と し て そ れ ぞ れ の 軌 道 計 画 を 開 発 し た こ と に よ っ て ,そ れ ら を 容 易 に 統 合 可 能 で あ る こ と を 示 す .
第6章 で は ,本 研 究 の 成 果 ,結 論 を ま と め ,今 後 の 課 題 に つ い て 述 べ る .
第 2 章
地形変化対応のための足裏近接覚情報
2.1 概 要
本 章 で は 地 形 変 化 に 対 応 す る た め の 足 裏 近 接 覚 情 報 と し て ,足 裏 と 地 面 の 相 対 角 度 と 相 対 距 離 の2つ を 提 案 す る .ま ず こ れ ら2情 報 に よ る 地 形 変 化 対 応 へ の 貢 献 に つ い て 述 べ ,次 に2情 報 を 取 得 可 能 な 近 接 覚 セ ン サ と し て ネ ッ ト 状 近 接 覚 セ ン サ に つ い て 述 べ る .さ ら に 提 案 す る 足 裏 近 接 覚 情 報 を 用 い た 実 時 間 軌 道 計 画 に よ る 地 形 変 化 対 応 の ケ ー ス ス タ デ ィ と し て ,ホ ビ ー ロ ボ ッ ト を 用 い た 傾 斜 未 知 の 上 り 坂 に 対 す る 転 倒 防 止 動 作 の 実 験 を 行 う .
実 験 を 行 う に あ た っ て ,足 裏 ネ ッ ト 状 近 接 覚 セ ン サ の 試 作 と 脚 軌 道 計 画 を 行 う .セ ン サ 試 作 で は ,想 定 す る 地 形 の 範 囲( 傾 斜・段 差 の 高 さ )に 対 し て 情 報 欠 落 の な い 足 裏 ネ ッ ト 状 近 接 覚 セ ン サ を 簡 易 に 設 計 す る 方 法 を 示 す . 脚 軌 道 計 画 で は ,安 定 指 標 と し て 一 般 的 なZMPを 採 用 し ,転 倒 を 防 ぐ 着 地 軌 道 の 計 画 方 法 を 述 べ る .最 後 に 転 倒 防 止 動 作 実 験 を 実 行 し ,足 裏 近 接 覚 セ ン サ を 用 い た 実 時 間 軌 道 計 画 に よ っ て 傾 斜 未 知 の 上 り 坂 に 対 す る 高 速 か つ 安 定 な 着 地 が 可 能 で あ る こ と を 示 す .
な お ,以 降 で は ネ ッ ト 状 近 接 覚 セ ン サ を「NSPS」(Net-Structure Proximity Sensor) と 呼 び ,特 に 足 裏 に 実 装 し た も の を「 足 裏NSPS」と 呼 ぶ .さ ら に 足 裏 に 実 装 し た 近 接 覚 セ ン サ を 総 称 し て「 足 裏 近 接 覚 セ ン サ 」と 呼 ぶ .
2.2 地 形 変 化 対 応 に 用 い る 足 裏 近 接 覚 情 報 の 提 案
本 論 文 に お け る 足 裏 へ の 近 接 覚 実 装 の 目 的 は 以 下 の2点 に 分 類 で き る .
・ 接 地 部 の 姿 勢 と 接 地 の タ イ ミ ン グ を 制 御 し て 所 望 の 接 地 状 態 を 得 る
・ 地 形 を 推 定 し て 適 切 な 着 地 位 置 を 計 画 す る
こ れ ら に 対 し て ,本 論 文 で は 足 裏 と 地 面 の 相 対 角 度 と 相 対 距 離 を 用 い る . 前 者 に つ い て そ の 必 要 性 を 補 足 す る .完 全 に 点 接 地 す る 針 状 の 足 部 を 除 い て ,足 部 の 姿 勢 変 化 は 接 地 点 を 変 化 さ せ る .特 に 一 般 的 に 用 い ら れ る 平 板 状 の 足 部( 以 降 ,平 板 足 と 記 す )を 用 い る 場 合 は ,正 対 時 に は 面 接 地 と な る が ,僅 か に 姿 勢 が 変 化 す る と 端 部 で の 線( 点 )接 地 へ と 離 散 的 に 変 化 す る .さ ら に 安 定 指 標 にZMPを 用 い る 場 合 は 接 地 状 態 に よ っ て 支 持 多 角 形 が 決 ま る た め ,想 定 と の 相 違 は 転 倒 を 招 く .し た が っ て 接 地 部 で あ る 足 裏 と 地 面 の 相 対 角 度 を 近 接 覚 に よ っ て 取 得 し ,こ れ を 所 望 の 状 態 へ と 制 御 す る 必 要 が あ る .ま た ,支 持 脚 に よ る ヒ ュ ー マ ノ イ ド と 地 面 の 相 対 運 動 と 着 地 時 の 遊 脚 運 動 は 整 合 性 を 持 つ 必 要 が あ り ,整 合 性 を 持 た な い 着 地 は“躓 き” と し て 転 倒 を 招 く 要 因 と な る .そ の た め 足 裏 と 地 面 の 相 対 距 離 を 近 接 覚 で 取 得 し ,所 望 の 距 離 だ け の 蹴 上 げ や 所 望 の タ イ ミ ン グ で の 接 地 を 実 行 す る 必 要 が あ る .
後 者 の 地 形 推 定 に つ い て 補 足 す る .本 来 地 形 は 不 規 則 で モ デ ル 化 が 困 難 で あ る .そ こ で 本 論 文 で は 近 接 領 域 内 の 地 形 か ら 一 様 な 傾 斜 の 斜 面 を 推 定 し ,こ れ を 制 御 サ イ ク ル ご と に 更 新 す る こ と で 軌 道 計 画 を 実 行 す る(Fig.2.1). Fig.2.1に 示 す よ う に 傾 斜 が 不 連 続 に 変 化 す る 地 形 を 例 に す る .あ る 傾 斜αの 斜 面 か ら 傾 斜β の 斜 面 へ と 不 連 続 に 変 化 す る 点 へ 接 近 す る に つ れ ,推 定 さ れ る 地 形 の 傾 斜 はα か らβ へ と 変 化 し て い く .さ ら に 脚 の 進 行 に よ っ て 変 化 点 を 通 過 す る と ,推 定 さ れ る 地 形 の 傾 斜 はβと 一 致 す る .こ の よ う な 地 形 推 定 は 前 述 の 足 裏 と 地 面 の 相 対 角 度 と 相 対 距 離 ,お よ び 順 運 動 学 計 算 に よ り 求 ま る ヒ ュ ー マ ノ イ ド の 姿 勢 を 用 い て 実 行 す る こ と が 可 能 で あ る .
以 上 よ り 本 論 文 で は 足 裏 近 接 覚 情 報 と し て“足 裏 と 地 面 と の 相 対 角 度”と“ 足 裏 と 地 面 と の 相 対 距 離”を 用 い る こ と を 考 え ,次 節 で 実 際 に こ れ ら の 情 報
Flat foot
Actual ground Estimated ground
Proximity range
α
β
Fig. 2.1 Terrain estimations
を 取 得 可 能 な 近 接 覚 セ ン サ で あ るNSPSに つ い て 述 べ る .
2.3 NSPS に よ る 相 対 角 度 と 相 対 距 離 の 検 出
2.3.1 基 本 構 成 と 検 出 原 理
最 も 簡 単 なNSPSで あ る 光 学 式1次 元NSPSを 例 に 相 対 角 度 と 相 対 距 離 の 検 出 原 理 を 説 明 す る .Fig.2.2,Fig.2.3に そ の 概 念 図 と 回 路 構 造 を 示 す .光 学 式1 次 元NSPSは あ る 方 向( 便 宜 上X軸 と す る )に 沿 っ てn個 配 置 し た 光 学 式 の 検 出 素 子( 赤 外LEDと フ ォ ト ト ラ ン ジ ス タ(PTr)の 組 )と 抵 抗 ネ ッ ト ワ ー ク か ら な る .抵 抗 ネ ッ ト ワ ー ク は 検 出 素 子 同 士 を 繋 ぐ(n−1)個 の 内 部 抵 抗riと ,端 子VS1,VS2と 負 電 源V[−]を 繋 ぐ 外 部 抵 抗R0で 構 成 さ れ て い る .
対 象 物 の 接 近 に 伴 い ,LEDか ら 発 射 さ れ た 赤 外 光 が 対 象 物 表 面 で 反 射 し , そ の 反 射 光 がPTrに 入 射 す る .PTrに 赤 外 光 が 入 射 す る こ と で 光 電 流 が 流 れ , 抵 抗 ネ ッ ト ワ ー ク 内 に はPTr表 面 の 反 射 光 分 布 に 応 じ た 光 電 流 分 布 が 発 生 す る .i番 目 の 素 子 に 光 電 流Iiが 生 じ た と き ,端 子VS1側 と 端 子VS2側 に 分 岐 し
て 流 れ る 電 流 は そ れ ぞ れ 式(2.1)で 表 さ れ る .
Ii1=
n−1
∑
k=i
rk+R0
n−1
∑
k=1
rk+2R0
Ii, Ii2=
i−1
∑
k=1
rk+R0
n−1
∑
k=1
rk+2R0
Ii (2.1)
こ れ ら の 差 は 式(2.2)と な る .
Ii2−Ii1=
i−1
∑
k=1
rk−n−1
∑
k=i
rk
n−1 k=1
∑
rk+2R0
Ii (2.2)
こ こ で 抵 抗 値 を 距 離 と し て 扱 う 抵 抗 値 空 間 を 考 え る と ,式(2.2)の 分 子 は 抵 抗 値 空 間 の 中 心 を0と し てX軸 正 方 向 を 正 と す るi番 目 の 素 子 の 位 置 を 表 し て い る .上 記 の 現 象 は 全 て の 検 出 素 子 で 起 こ る た め ,光 電 流 は 重 ね 合 わ さ れ ,式(2.3)が 成 り 立 つ .
n−1
∑
i=1
(Ii2−Ii1) =
n−1
∑
i=1
i−1
∑
k=1
rk−n−1
∑
k=i
rk
n−1
∑
k=1
rk+2R0 Ii
(2.3)
式(2.3)は 抵 抗 値 空 間 の 大 き さ で 正 規 化 し た 光 電 流 分 布 の1次 モ ー メ ン ト を 表 し て い る .こ こ で ,VS1,VS2,V[−],R0を 用 い る と 式(2.4),(2.5)の 関 係 が 導 け る .
n−1 i=1
∑
(Ii2−Ii1) =VS2−VS1 R0
(2.4)
n−1
∑
i=1
Ii=VS1+VS2−2V[−]
R0 ≡Iall (2.5)
式(2.3),(2.4),(2.5)よ り 端 子 電 圧VS1,VS2を 計 測 す る こ と で 光 電 流 分 布 の1次 モ ー メ ン ト と 全 電 流 量 を 求 め る こ と が で き ,1次 モ ー メ ン ト を 全 電 流 量 で 除 す る こ と で 光 電 流 分 布 の 重 心 位 置 を 求 め る こ と が で き る .
対 象 物 がNSPSよ り も 十 分 に 大 き い 場 合 ,Fig.2.4(a)に 示 す よ う にNSPSと 対
X
Infrared LED Photo
transistor
Fig. 2.2 Conceptual scheme of NSPS
象 物 の 相 対 角 度 に よ っ て 光 電 流 分 布 の 重 心 位 置 が 変 化 す る .こ の 現 象 を 利 用 し て ,上 記 の 計 算 よ り 求 ま る 光 電 流 分 布 の 重 心 位 置 をNSPSと 対 象 物 と の
「 相 対 角 度 出 力 」と し て 用 い る こ と が で き る[44].そ こ で ,NSPSを よ り 使 い や す く す る た め に 式(2.6)を 用 い ,重 心 位 置 を[-1,1]に 正 規 化 し て 求 め る .
xc=
1+ 2R0
n−1
∑
i=1
ri
( VS2−VS1 VS1+VS2−2V[−]
)
(2.6)
一 方 ,Fig.2.4(b)に 示 す よ う にNSPSか ら 対 象 物 ま で の 相 対 距 離 に よ っ てPTr に 入 射 す る 反 射 光 量 が 変 化 し ,抵 抗 ネ ッ ト ワ ー ク 内 の 全 電 流 量 は 変 化 す る . そ の た め ,NSPSと 対 象 物 の 相 対 距 離 は 式(2.5)か ら 得 ら れ る 抵 抗 ネ ッ ト ワ ー ク 内 の 全 電 流 量Iallか ら 推 定 す る こ と が で き ,こ れ を「 相 対 距 離 出 力 」と し て 用 い る こ と が で き る .
Vs1 Vs2
R0 R0
・・・
i=1 i=2 ・・・ i=n-1 i=n
V[+]
V[-]
・・・
・・・
I(1) I(2) I(n-1) I(n)
0
x
-1 1
I1 I2
r1 r2 rn-1
Fig. 2.3 The circuit of optical one-dimensional NSPS
Position
Photocurrent
Center of photocurrent
Distance The total photocurrent
Distance
(a) The relative angle output (b) The distance output Sensor
Object
Object Sensor
Fig. 2.4 Outputs of NSPS
Layer B Layer A
X Y [VS3]
[VS1] [VS2 ]
[VS4]
R0
R0
R0
R0
+V0
-V0
VLED
GLED
LED
r r
r r
PTr.
Va(i,j)
Va(i-1,j)
Va(i+1,j)
Va(i,j-1) Va(i,j+1)
Vb(i,j)
Vb(i-1,j)
Vb(i+1,j)
Vb(i,j-1) Vb(i,j+1)
Fig. 2.5 The circuit of optical two-dimensional NSPS
2.3.2 2 次 元 NSPS
Fig.2.5の よ う に マ ト リ ク ス 状 に 配 置 し たPTrの コ レ ク タ 側 と エ ミ ッ タ 側 に そ れ ぞ れ 抵 抗 ネ ッ ト ワ ー ク を 接 続 す る .コ レ ク タ 側 の 抵 抗 ネ ッ ト ワ ー ク をLayer A,エ ミ ッ タ 側 をLayer Bと す る .Layer AがPTrをX軸 方 向 に 接 続 し , Layer BがY軸 方 向 に 接 続 す る と ,そ れ ぞ れ の 抵 抗 ネ ッ ト ワ ー ク で 第2.3.1節 の 原 理 が 成 り 立 ち ,式(2.7),(2.8)か ら 光 電 流 分 布 の 重 心 位 置 のX,Y 座 標 を 求 め る こ と が で き る .
xc=
1+ 2R0
n−1
∑
i=1
ri
( VS2−VS1 2V[+]−VS1−VS2
)
(2.7)
yc=
1+ 2R0
m−1
∑
j=1rj
( VS4−VS3 VS3+VS4−2V[−]
)
(2.8)
Iall= 2V[+]−VS1−VS2 R0
=VS3+VS4−2V[−]
R0
(2.9) こ れ を 用 い る こ と で ,2次 元NSPSか ら は2軸 回 り の 相 対 角 度 出 力 と 相 対 距 離 を 得 る こ と が で き る .
2.4 ケ ー ス ス タ デ ィ:転 倒 防 止
2.4.1 概 要
本 節 で は ,第2.2節 で 提 案 し た 足 裏 近 接 覚 情 報 を 用 い て 実 際 に 実 時 間 軌 道 計 画 を 行 う .実 行 す る 動 作 は ,傾 斜 が 未 知 の 上 り 坂 に 向 け て 一 歩 前 進 し ,転 倒 せ ず に 静 止 す る 動 作 と す る(Fig.2.6).
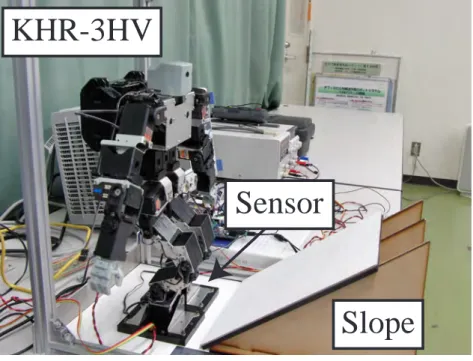
実 験 に は ホ ビ ー サ イ ズ の ヒ ュ ー マ ノ イ ドKHR-3HV(近 藤 科 学 社 製)[48]を 用 い る .既 存 の 足 部 は 縦:100.0 mm,横:75.0 mm,高 さ:10.0 mmの 平 板 足 で あ る た め ,こ れ と 同 形 状 の 足 裏NSPSを 試 作 し て 使 用 す る .
NSPSは 対 象 物 の 角 度 変 化 ,距 離 変 化 に 対 し て 情 報 欠 落 を 生 じ な い よ う に 検 出 素 子 の 配 置 を 設 計 す る 必 要 が あ る .従 来 は こ れ を レ イ ト レ ー シ ン グ 法 に よ る 光 学 シ ミ ュ レ ー タ を 用 い て 試 行 錯 誤 的 に 行 っ て い た[42]が ,本 論 文 で は 平 板 足 に 実 装 す る 足 裏NSPSを よ り 簡 易 に 設 計 す る 方 法 を 提 案 し ,こ れ を 用 い て 試 作 す る 平 板 足 裏NSPSを 使 用 し て 転 倒 防 止 実 験 を 行 う .
実 験 で 実 行 す る 軌 道 はZMPに 基 づ い て 計 画 す る こ と で 足 裏 の 剥 離 を 防 ぎ , 転 倒 を 回 避 す る .
以 降 で は こ れ ら に つ い て 述 べ た 後 ,転 倒 防 止 実 験 の 結 果 を 示 す .
? ?
Fig. 2.6 The overview of the case study
Incident light Specular reflection Diffuse reflection
(c) The sensor may lose the object if no elements detect specular reflection light from the object
Object
θ
Specular reflection Insensible angle
(b) Two kinds of reflection
Foot Φ
(a) Detecting element
Fig. 2.7 The relation between insensible field and optical characteristics
2.4.2 平 板 足 裏 NSPS の 設 計 方 法
検 出 素 子 の 検 出 角 度 に 基 づ く 素 子 配 置 設 計
検 出 素 子 に は 半 値 角 と 呼 ば れ る 指 向 性 を 示 す パ ラ メ ー タ が あ る(Fig.2.7(a)). こ れ は 検 出 素 子 表 面 の 鉛 直 方 向 を0 degと し た と き ,そ の 出 力 が 半 分 に な る 角 度 を 示 す .半 値 角 以 上 の 範 囲 で は ,検 出 素 子 の 出 力 が 著 し く 低 下 す る こ と が 多 い た め ,通 常 は 半 値 角 内 を 検 出 範 囲 と し て 用 い る .そ こ で 今 回 も ,検
出 素 子 の 半 値 角ϕ を 基 に 検 出 素 子 の 配 置 を 決 定 す る .
具 体 的 に は ,2つ の こ と に 留 意 し て 配 置 を 決 定 す る .1つ 目 は ,足 裏NSPS の 目 標 の 最 大 検 出 角 度 をΘと し ,所 望 の 検 出 距 離 をdmin∼dmaxと し た と き , こ の 範 囲 内 で 想 定 す る 対 象 物 の 長 さl以 上 の 不 感 領 域 が 生 じ な い 配 置 と す る こ と で あ る .2つ 目 は ,目 標 の 最 大 検 出 角 度Θ内 の 任 意 の 角 度θ を 検 出 範 囲 に 含 む 検 出 素 子 が 少 な く と も1つ あ る よ う に 配 置 す る こ と で あ る .
1つ 目 の 必 要 性 は 自 明 で あ る .2つ 目 を 留 意 す る 理 由 は ,対 象 物 か ら の 反 射 光 の う ち ,鏡 面 反 射 成 分 を 検 出 可 能 に す る た め で あ る .あ る 物 体 に 光 が 照 射 さ れ た 際 ,そ の 反 射 光 はFig.2.7(b)に 示 す よ う に ,鏡 面 反 射 成 分 と 拡 散 反 射 成 分 の2種 類 に 分 け ら れ る .こ れ ら2種 類 の 反 射 成 分 の 反 射 率 は 物 体 に よ っ て 異 な る .例 え ば 光 沢 を も つ 金 属 や 鏡 な ど は 鏡 面 反 射 成 分 の 反 射 率 が 高 く ,拡 散 反 射 成 分 の 反 射 率 が 低 い .足 裏NSPSの 対 象 と な り う る 物 体 で は , 大 理 石 な ど は 鏡 面 反 射 成 分 が 主 と な る 例 と し て 挙 げ ら れ る .Fig.2.7(c)の よ う に 素 子 間 の 検 出 範 囲 に 隙 間 が 存 在 す る 場 合 ,鏡 面 反 射 成 分 は い ず れ の 素 子 に も 十 分 に 検 出 さ れ ず ,最 悪 の 場 合 ,対 象 物 を 見 失 う 可 能 性 が あ る .
1 つ 目 の 留 意 点 を「 条 件1」,2つ 目 を「 条 件2」と 定 義 し ,以 降 で2条 件 を 満 た す 設 計 方 法 を 示 す .な お ,以 下 で は 矢 状 面 を 例 に 記 述 す る が ,冠 状 面 に つ い て も 設 計 方 法 は 同 じ で あ る .
ま ず ,最 大 検 出 角 度Θは 足 裏NSPS両 端 の 検 出 素 子 の 検 出 範 囲 に よ っ て 決 ま る(Fig.2.8(a)).Θを 垂 線 に よ っ て 前 後 に 分 割 し た も の を そ れ ぞ れθrear,θf ront
と す る と ,両 端 の 検 出 素 子 の 傾 き(αrear,αf ront)は ,式(2.10), (2.11)で 決 定 さ れ る .な お ,ϕrear1,ϕf ront1は そ れ ぞ れ の 検 出 素 子 の 半 値 角 で あ る .
αrear = θrear−ϕrear1 (2.10)
αf ront = θf ront−ϕf ront1 (2.11)
こ の と き 足 裏NSPSの 法 線 方 向 に は 不 感 領 域 が 存 在 す る 場 合 が あ り ,そ の