車車間通信における協調相対測位手法の実験評価
6
0
0
全文
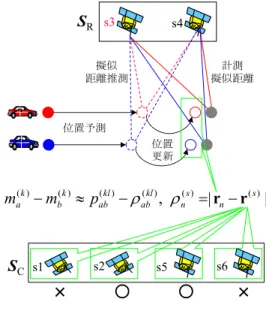
(2) Vol.2014-ITS-56 No.14 2014/3/7. 情報処理学会研 情 研究報告 IP PSJ SIG Techniical Report に, に 2 台の車両 両にそれぞれの の受信機を載せ せて走行する場 場合. めに,車両間に における擬似距 距離の交換[9],及び,擬似距 ため. の実験設定を説 の 説明する.その の後,この実験 験データを基に に,. 離に に含まれるマル ルチパス誤差の の相関性の判断が必要となる.. 受信機が移動す 受 する場合のマル ルチパス誤差の の特性とその空 空間 相関性を示し, 相 さらに,マル ルチパス誤差の の相関性と速度 度依 存性を用いるこ 存 ことによる測位 位誤差の低減効 効果を確認し, ,最. 3. 実験設定 本稿では,実験 本 験データを用い いてマルチパス誤差の特性 性と 相関 関性を調べ,受 受信機間の相対 対位置の誤差を評価する.. 後に論文をまと 後 とめる.. 図 2 に示すように,実験では は,N 受信機[a]と U 受信機[b]. 2. 協調相対 対測位手法の の概要. の 2 種類の受信機 機を使用し,N N1,N3,U1,U3 U を車両 1 に,. 図 1 を参照し しながら,車両 両間の協調相対 対測位手法の概 概念. N2,U2 を車両 2 に載せ,東京 京八重洲付近での走行実験 験を 行っ った.高性能ジ ジャイロなどを を併用した高精 精度測位システ. について述べる に る.. ム(RTK-GPS)で で算出した車両 両の位置(精度:0.5m 以内 内). 共通衛星、信号の空間 間相関性がある. を真 真値とする.ま また,実験デー ータ分析中衛星の仰角マスク s3. s2. s4. s5. を 15 1 度に設定す する. s6 6. s1. a. 衛星s3, s4, s5, s6 6 multipath誤差あり り. b. 協調相対 対測位によって 算出された相対位置. 衛星s1, s3, s4 4 multipath誤差あ あり. 既存手法によっ って算出された相対 対位置. 図 1 Figure 1. 図 2 Figure F 2. 協調相対測位の の概念 車両間の協. Cooncept of coopperative relativee positioning foor vehiculaar networks.. 実 実験設定 Expeeriment setup.. 4. 実験データ タに基づくマ マルチパス誤差の分析 析 受信機の位置の 受 の真値を基に, ,擬似距離におけるマルチパ. 都市部におい いては,路側の の建物の遮蔽の の影響で直接波 波は 遮られ,その代 遮 代わりに,別の の建物の反射に による反射波は は車 両に搭載した 両 G GNSS 受信機に に受信されるこ ことが頻繁に発 発生. ス誤 誤差成分を算出 出し,統計分析 析を行う.[8]では,車両が停 止す する場合のマル ルチパス誤差の の相関性を確認 認したが,今回 は受 受信機が移動す する場合の特性 性を調べる.. する. す 図 1 に,車両 a が衛星 星 s2 から直接波 波を受信し,s33, s4, s5 5, s6 から反射 射波を受信し,近隣の受信機 近 b が衛星 s2, ss5 か ら直接波を受信 ら 信し,s1, s3, s44 から反射波を を受信すると仮 仮定 したものを示す し す.車両 a と b がそれぞれ単 単独で自車両の の絶 対位置を算出す 対 する場合,反射 射波の影響によ よって,算出 され た絶対位置は真 た 真値からずれる る.一方,二台 台の車両が共通 通に は直 受信できる衛星 受 星のうち,どち ちらの車両も s2 からの信号は 接波であり,s3 接 3, s4 からの信 信号は同じ反射 射面による反射 射波 である.この反 で 反射による擬似 似距離の延長分 分であるマルチ チパ ス誤差は ス 2 台車 車両での値が近 近く,相関性が があるとする. .そ れに対して,s5 れ 5 からの信号は車両 b では は直接波である るが, 車両 車 a では反射 射波であるため めマルチパス誤 誤差の相関性が が低 いとする.車両 い 両間の相対位置 置はその擬似距 距離の差に依存 存す る.車両 る a と b において共通 通に受信できる る信号からマル ルチ パス誤差の相関 パ 関性の高いもの の(s2, s3, s4) )を選択して相 相対 位置を算出すれ 位 れば,マルチパ パス誤差が相殺 殺され,相対位 位置 が精度良く算出 が 出できる.この の協調相対測位 位手法を実現す する. ⓒ2014 ⓒ Informatioon Processing Socciety of Japan. 図 3 Figure 3. 擬似 似距離における るマルチパス誤 誤差の分析 Anaalysis of multippath errors in psseudo-ranges.. 図 3 に示すように,受信機 機 n(n=a, b)と と衛星 s(s=l, k) の間 間の擬似距離を を考察する.擬 擬似距離は ( s) (s) ( s) (s) (1) pn( s) n( s) c (tn T ( s) ) dion ,n dtrop,n mn n. a) NovAtel OEM6. b) u--blox EVK-6T.. 2.
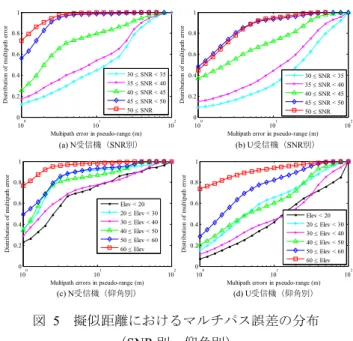
(3) Vol.2014-ITS-56 No.14 2014/3/7. 情報処理学会研究報告 IPSJ SIG Technical Report (s). 機時刻誤差,c は光速度,T よる誤差, . (s) n. (s) は衛星時刻誤差,d ion ,n は電. 限らず,複数の反射と回折によるマルチパス波も受信して いるためと考えられる.. (s) n. は対流圏による誤差, m は反射に. は熱雑音による誤差である.. 受信機 a と b が近くに設置されるとすれば,差分演算に よって擬似距離における誤差が相殺できる.それで,擬似 (s). (s). 距離の二重差には, tn , T ( s ) , d ion ,n , dtrop ,n の影響がほ. 1 Distribution of multipath error. 離層による誤差, d. (s) trop , n. (s). 0.8 0.6. (s). 30 35 40 45 50 . 0.4 0.2 0 0 10. とんどなくなる.さらに n を無視すれば,擬似距離の二. 1 Distribution of multipath error. と表すことができる.ここで, n は距離真値, tn は受信. SNR < 35 SNR < 40 SNR < 45 SNR < 50 SNR. 1. 10 Multipath error in pseudo-range (m). 10. 0.8 0.6 0.4 0.2 0 0 10. 2. 30 35 40 45 50 1. 10 Multipath error in pseudo-range (m). (a) N受信機(SNR別). 重差が. 仰角の高い衛星 l を参照衛星として選択し,それからの 受信信号にはマルチパス誤差が発生しない( mn 0 )と (l ). 0.8 0.6. する.受信機 b はオープンスカイ環境に設置される基準局. Elev < 20 20 Elev < 30 30 Elev < 40 40 Elev < 50 50 Elev < 60 60 Elev. 0.4 0.2 0 0 10. 1. 10 Multipath errors in pseudo-range (m). (k ). 図 5. 射によって受信機 a と衛星 k との 間の擬似距離に生じるマ. 0.2 0 0 10. 2. Elev < 20 20 Elev < 30 30 Elev < 40 40 Elev < 50 50 Elev < 60 60 Elev. 0.4. 1. 10 Multipath errors in pseudo-range (m). 10. 2. (d) U受信機(仰角別). (SNR 別,仰角別). ルチパス誤差成分 ma は. Figure 5. ma pab ab ( kl ). 0.6. 擬似距離におけるマルチパス誤差の分布. (k ). (k ). 10. 0.8. (c) N受信機(仰角別). である場合,そのマルチパス誤差 mb 0 が 0 であり,反. 2. 1 Distribution of multipath error. となる.. Distribution of multipath error. (2). 10. (b) U受信機(SNR別). 1. ( kl ) ( kl ) pab ab ( ma( k ) mb( k ) ) ( ma( l ) mb( l ) ). SNR < 35 SNR < 40 SNR < 45 SNR < 50 SNR. ( kl ). (3). Distribution of multipath errors in pseudo-ranges (per SNR range, per elevation-angle range).. と近似できる.. マルチパス誤差は車両の移動速度にも依存する.図 6 に. 4.1 マルチパス誤差の分布. マルチパス誤差の累積分布を速度別に示す.2 種類の受信 機は共に,速度が低いほどマルチパス誤差が大きくなるこ. 図 4 に示す.この図からマルチパス誤差が 100m まで増加. とがみてとれる.これは,GNSS 受信機の構成によるもの. し,また,N 受信機と比べて,U 受信機のマルチパス誤差. であり,受信機は tracking loop を用いて測位信号を追従す. が大きいことがわかる.. るため,速度の低い場合,マルチパス波は変動が小さいた. 1. め,tracking loop に入りやすく,マルチパス誤差が発生し やすくなることが原因であると考えられる.. 0.8 0.6 0.4. NovAtel N受信機 U受信機 Ublox. 0.2 0 0 10. 0.8 0.6. 10 Multipath error in pseudo-range (m). 0.2. 2. Figure 4. 1. 10 Multipath errors in pseudo-range (m). 10. 擬似距離におけるマルチパス誤差の分布 Distribution of multipath errors in pseudo-ranges.. 更に,SNR 別にマルチパス誤差の累積分布を図 5(a-b)に. 2. 10. 0.8 0.6 Speed=0 0< Speed < 5km/h 5km/h Speed < 10km/h 10km/h Speed < 20km/h 20km/h Speed < 40km/h 40km/h Speed. 0.4 0.2 0 0 10. (a) N受信機(速度別). 図 6 図 4. Speed=0 0< Speed < 5km/h 5km/h Speed < 10km/h 10km/h Speed < 20km/h 20km/h Speed < 40km/h 40km/h Speed. 0.4. 0 0 10 1. 1 Distribution of multipath error. 1 Distribution of multipath error. Distribution of multipath error. 2 種類の受信機のマルチパス誤差の累積分布(CDF)を. 1. 10 Multipath errors in pseudo-range (m). 2. 10. (b) U受信機(速度別). 擬似距離におけるマルチパス誤差の分布(速度別). Figure 6. Distribution of multipath errors in pseudo-ranges (per-speed range).. 4.2 マルチパス誤差の相関性. 示す.直接波より反射波は反射点での減衰によって SNR が. 前節では,受信機を区別せずに,マルチパス誤差の統計. 低くなるため,SNR が上がるにつれ,反射波である可能性. 情報を調べたが,この節では,2 台の受信機の間のマルチ. が下がり,そのマルチパス誤差も小さくなる.SNR が 45dB. パス誤差の相関性について調べる.. を上回ると,マルチパス誤差は 0 に近くなる.. 図 7 に,2 台の受信機に対して,非共通衛星のマルチパ. 仰角別にマルチパス誤差の累積分布を図 5(c-d)に示す。. ス誤差,共通衛星のマルチパス誤差,及び共通衛星のマル. 仰角が小さいほどマルチパス誤差が大きくなる傾向がある.. チパス誤差の差の累積分布を,受信機の種類と受信機間の. N 受信機と比べて,U 受信機の方は仰角の低い場合マルチ. 距離ごとに示す.これに基づいて下記の結論が得られる.. パス誤差が大きくなる.それは,U 受信機が一回の反射に. (1)すべての場合において,共通衛星のマルチパス誤. ⓒ2014 Information Processing Society of Japan. 3.
(4) Vol.2014-ITS-56 No.14 2014/3/7. 情報処理学会研究報告 IPSJ SIG Technical Report 差の差は元のマルチパス誤差よりはるかに小さくなる.す. の peak が減り,マルチパス誤差の相関性が下がる.また,. なわち,共通衛星のマルチパス誤差に対して差分演算を行. U 受信機より N 受信機の方は受信機間のマルチパス誤差の. えば,相殺効果がある.. 相関性が高いことも確認できる.. (2)マルチパス誤差が一定閾値(例えば 10m)以下の. 4.3 衛星数の分布. 確率が 1 ではなく,相関性の低いマルチパス誤差が存在す る.. 近年,GPS 衛星のみならず,GLONASS や準天頂衛星 (QZSS)も測位に利用可能になった.都市部では,これら. (3)受信機間の距離が増えると(N 受信機:(a)から (b)へ,または U 受信機:(c)から(d)へ),マルチパ. の衛星システムを一緒に使用すれば,反射波を除外する場 合,衛星数が足りるかを,実験で検証する.. ス誤差の差が一定閾値以下の確率が減り,相関性が減る.. N 受信機の epoch ごとの衛星数の累積分布を図 9(a)に. (4)N 受信機と比べて,U 受信機の方(同車両:(a). 示す.N 受信機は GPS, GLONASS, QZSS を使っており,測. から(c)へ,または異車両:(b)から(d)へ)はマルチ. 位のために 5 機以上の衛星が必要である.衛星数が 4 以下. パス誤差が一定閾値以下の確率が小さく,相関性が低い.. になると単独で測位不能の確率は約 20%であり,その確率. 1. 0.8 0.6 0.4 MPE diff (CommSat) MPE (CommSat) MPE (NonCommSat). 0.2 0 0 10. 1. 10 Multipath error in pseudo-range (m). 10. べてのマルチパス波を除外すると,その測位不能の確率が 50%. 一方,U 受信機は GPS 衛星のみを利用し,衛星数が 3 以. 0.4 MPE diff (CommSat) MPE (CommSat) MPE (NonCommSat). 0.2. 1. 10 Multipath error in pseudo-range (m). (a) N1-N3. 10. 下になると測位不能となる.図 9(c)に示すように,その 測位不能の確率は仰角によって大幅に変動する.マルチパ. 2. (b) N1-N2. ス波を除外すると,図 9(d)に見られるようにその確率が. 1. 0.8 0.6 0.4 MPE diff (CommSat) MPE (CommSat) MPE (NonCommSat). 0.2 0 0 10. 1. 10 Multipath error in pseudo-range (m). 10. 急激に 60%ぐらいにまであがる.仮に QZSS 衛星を 1 機使. 0.8. 用しても,測位不能の確率は 40%ぐらいである.. 0.6. 50% 0.4 MPE diff (CommSat) MPE (CommSat) MPE (NonCommSat). 0.2 0 0 10. 2. 1. 10 Multipath error in pseudo-range (m). (c) U1-U3. 図 7 Figure 7. 10. Distribution of epoches. Distribution of multipath error. 1 Distribution of multipath error. 約 10%増える.. 0.6. 0 0 10. 2. はさらに仰角マスクに依存する.図 9(b)に示すようにす. 0.8. 2. (d) U1-U2. マルチパス誤差の分布 Distribution of multipath errors.. 1. 1. 0.8. 0.8. 0.6 ElevMask=20 ElevMask=25 ElevMask=30 ElevMask=35 ElevMask=40 ElevMask=45. 0.4 0.2 0. 0. 2. 0.006. 4. 0.01. 3. 0.004 10. 2. 10. 1. Receiver 2 MPE (m). 0. 10. 10. 0. 10. 1. 10. 2. 2. 0.002. 10. 2. 10. 0. 1. Receiver 2 MPE (m). Receiver 1 MPE (m). (a) N1-N3. 0. 10. 10. 0. 10. 1. 10. 2. 1 0. Receiver 1 MPE (m). -3. x 10. x 10. 8. 0.02. 0.02. 6 0.01. 5 4. Histogram. 7. 2. 10. 1. Receiver 2 MPE (m). 0. 10. 10. 0. 図 8. 0. 16. 0. 2. 4. 6 8 10 Number of satellites. 12. 14. 16. (b) N受信機(Multipath波除外). 1. 1 0.8. ElevMask=20 ElevMask=25 ElevMask=30 ElevMask=35 ElevMask=40 ElevMask=45. 0.6 0.4 0.2 0. 0. 2. 4. 6 5. 0.01. ElevMask=20 ElevMask=25 ElevMask=30 ElevMask=35 ElevMask=40 ElevMask=45. 0.6 0.4 0.2. 10. 1. 10. 2. Receiver 1 MPE (m). 2 1 0. 6 8 10 Number of satellites. 12. 14. 16. (c) U受信機(Multipath波含). 0. 0. 2. 4. 6 8 10 Number of satellites. 12. 14. 16. (d) U受信機(Multipath波除外). 4. 図 9. 3. 10. 2. 2. 10. 1. Receiver 2 MPE (m). (c) U1-U3. Figure 8. 14. 0.8. 3 10. 12. 0.2. (b) N1-N2 -3. Histogram. Distribution of epoches. 0.008 0.01. 6 8 10 Number of satellites. ElevMask=20 ElevMask=25 ElevMask=30 ElevMask=35 ElevMask=40 ElevMask=45. 0.4. 6 5. Histogram. Histogram. 7 0.02. 0.01. 4. 0.6. (a) N受信機(Multipath波含). x 10 0.012 0.02. Distribution of epoches. Distribution of multipath error. Distribution of multipath error. 1. 10m. Distribution of epoches. 10m. 0. 10. 10. 0. 10. 1. 10. 2. 1. Figure 9. 測位中使用できる衛星数の分布. Distribution of #satellites available for positioning.. Receiver 1 MPE (m). (d) U1-U2. 2 台の受信機でのマルチパス誤差の相関性 Correlation in multipath errors of two receivers.. 5. 測位手法と評価結果 図 9 より,都市部では,建物の遮蔽の影響で,受信でき る衛星数が少なくて単独に測位できないことが発生しうる. 更に,2 台の受信機でのマルチパス誤差を pair として,. ことがわかる.単純に反射波を除外すると,この問題はさ. その histogram を図 8 に示す.(a)と(c)では,2 台の受. らに悪化する.そこで,提案方式では,受信できた信号を,. 信機は同じ車両に搭載しており,受信機間の距離が短い.. 反射波を含めて利用する.すなわち,2 台の受信機が共に. その histogram の peak がほぼ軸の対角線に位置するので,2. 反射波を受信する場合,その擬似距離に含まれているマル. 台の受信機でのマルチパス誤差は相関性があることを確認. チパス誤差の相関性を判断し,相関性の低いものを除外し. できる. (a)から(b)へ,または(c)から(d)へ変わる. た上で,相関性の高い反射波を含めて相対位置を算出する.. と,受信機間の距離が離れるため,それに応じて histogram. 仰角の高い衛星 l を参照衛星とすれば,車両 a, b では. ⓒ2014 Information Processing Society of Japan. 4.
(5) Vol.2014-ITS-56 No.14 2014/3/7. 情報処理学会研究報告 IPSJ SIG Technical Report. ma( l ) 0, mb( l ) 0 であり,これを利用して,式(2)を書き 換えれば,a, b と衛星 k の間の擬似距離のマルチパス誤差 (k ) (k ) の差 m a m b は. ットを SC とする. (2)SR から仰角の一番高い衛星を参照衛星 l とする. その上で,移動速度情報,SR における衛星の擬似距離情報,. ( kl ) ma( k ) mb( k ) pab ab( kl ) ,. (4). ab( kl ) ( a( k ) b( k ) ) ( a( l ) b( l ) ), n( s ) | rn,t Rt( s ) |. 前時刻の車両位置情報 ra ,t 1 と rb,t 1 を用い,Kalman filter を介 . . して現時刻の車両位置 ra ,t と rb ,t を予測する. . . (3)SC における衛星 k に対して, ra ,t と rb ,t を式(4). ( kl ) ( kl ) のように,擬似距離の二重差 p ab と距離真値の二重差 ab. (k ) (k ) に代入して m a m b を算出する.その値が既定の閾値を. から算出できる.ただし, ab の算出に必要となる車両位. 越えれば衛星 k を SC から除外する.. ( kl ). 置 ra ,t と rb ,t は予測値であり,また衛星 s=k, l の位置である (s) t. (4)速度情報,SC に残る衛星と SR における衛星の擬. R は衛星の Ephemeris 情報から算出される. 都市部では見える衛星数が少なく,さらに,配置も悪い. 似距離情報,前時刻の車両位置情報 ra ,t 1 と rb,t 1 を用いて,. 場合には測位精度に影響が大きい.対策としては,擬似距. を求める.. 現時刻の車両位置 ra ,t と rb ,t を算出し,その差から相対位置. 離に加えて様々なセンサー情報を Kalman filter を介して位. 位置予測に車両の速度と移動方向情報が必要である.車. 置演算中使用する方法が挙げられる[10].車車間通信の場. 両の速度は正確に取得できるが,ジャイロを使用しなけれ. 合,車速パルスなどを介して得られた速度情報を加えて位. ば,移動方向を正確に取得できないため,道路の方向を車. 置予測を実現できる.相関性判断を行わず,2 台の受信機. 両の移動方向とする.. が共通に受信できる衛星との擬似距離に,Kalman filter を. Kalman filter によって算出した位置は,移動速度を用い. 適用する手法を本稿では KF+CommSat とする.また,位置. て得られた予測位置と計測擬似距離によって算出した計測. 予測の累積誤差を抑えるために,衛星数が基準値以下で測. 位置の重みづけとなり,この重みは予測位置の誤差分散値. 位 演 算 を 行 っ た 場 合 ,衛 星 数が 基 準値 以 上に 戻 る と ,. や計測擬似距離の分散値に依存する.算出位置は,速度精. Kalman filter を再度初期化する.. 度が高くて予測位置の精度が高い場合には,主に予測位置 となる.一方,計測擬似距離の精度がよい場合には,算出. SR. s3. s4. 位置は計測位置に大きく依存する.車両の速度情報に関し ては,曲る時,計測誤差が大きく,直進する時,計測誤差. 擬似 距離推測. 計測 擬似距離. が小さく,止まる時,計測誤差が 0 である.また,速度の 低い場合は,擬似距離にマルチパス誤差が発生しやすいた め,計測擬似距離の誤差分散値を大きめに設定し,速度の. 位置予測. 速い場合は,マルチパス誤差が発生しにくいので,計測擬. 位置 更新. 似距離の誤差分散値を小さめに設定する.これらの設定を. ( kl ) ( kl ) ma( k ) mb( k ) pab ab , n( s ) | rn r ( s ) |. 含めた CoRelPos を CoRelPos+とする. 図 11 に同じ車両に載せられた 2 台の N 受信機間の相対 位置の水平誤差を示す.受信機間の距離は短いが,(a)に示 すように,N 受信機から直接に得られた位置から算出した. SC. s2. s1. ×. s6. s5. 〇. 〇. 相対位置の誤差の RMS(root mean square)値が大きい.. ×. Kalman filter を用いても,(b)に見られるようにその誤差を 完全に取り除くことができない.マルチパス誤差の相関性. 図 10 Figure 10. マルチパス誤差の相関性判定. Correlation detection of multipath errors.. 協調相対測位手法(CoRelPos)では,各車両は計測情報 (衛星 ID,衛星との擬似距離,衛星信号の SNR,自端末の 移動速度)を取得し,隣接車両と交換し,下記の手順で,2 台の車両と共通衛星との間の擬似距離におけるマルチパス 誤差の相関性を判断し,相関性の低い受信波を除外してか ら,車両間の相対位置を算出する. (1)図 10 に示すように自車両と隣接車両の共通衛星 に対して,仰角・SNR が一定閾値以上である共通衛星を信 頼できる衛星セット SR として抽出し,その他の共通衛星セ. ⓒ2014 Information Processing Society of Japan. を判断して相関性の低い反射波を除外すると,(c)に示すよ うに相対位置の誤差が低く抑えられる.ここでは,二台の 受信機は同じ速度で移動するので,(d)と(c)の結果がほぼ同 じであり,速度に応じて速度誤差分散値と擬似距離誤差分 散値を調整する効果があまりない. 2 台の受信機をそれぞれの車両に載せた場合の相対位置 の水平誤差を図 12 に示す.受信機間の距離が離れるため, 図 11 と比べて,相対位置の RMS 誤差が大きくなる傾向が ある.この場合,受信機の移動タイミングや速度が異なる ため,それに応じて速度や擬似距離の誤差分散値を調整す れば,CoRelPos+は CoRelPos より測位誤差をさらに低減で. 5.
(6) Vol.2014-ITS-56 No.14 2014/3/7. 情報処理学会研究報告 IPSJ SIG Technical Report きる.. 本稿では,受信機が移動する場合のマルチパス誤差の特性 GPS Relative Positioning Error. 10. を調べ,マルチパス誤差に相関性があり,距離が離れるに. GPS Relative Positioning Error. 10. つれて相関性が下がることを示した.また,建物の遮蔽に よって直接に受信できる信号が限られており,単純に反射. 5 north error (m). north error (m). 5. 0. -5. 波を除外する場合,複数衛星システムを同時に使用しても, 0. 測位不能が発生することを確認した.受信機間のマルチパ ス誤差の相関性を判断し,相関性の低いものを除外するこ. -5. とによって測位誤差を低減できることも確認した.提案方 -10 -10. -10 -10. 10. 式は相対位置精度の向上のみならず,ある受信機の絶対位. (a) N受信機, RMS=22.94m. (b) KF+CommSat, RMS=13.56m. 置が正確にわかる場合,この手法を用いて,ほかの受信機. GPS Relative Positioning Error. GPS Relative Positioning Error. 10. -5. 0 east error (m). 5. 10. 10. 0 east error (m). 5. の絶対位置の精度を向上させることも可能である. 謝辞. 5 north error (m). north error (m). 5. -5. 0. -5. 本研究経費の一部に総務省戦略的情報通信研究. 開発推進制度(SCOPE)「移動体間端末協調衛星測位技術の研. 0. 究開発」を利用した. -5. 参考文献 -10 -10. -5. 0 east error (m). 5. -10 -10. 10. (c) CoRelPos, RMS=2.29m. -5. 0 east error (m). 5. 10. (d) CoRelPos+, RMS=2.28m. 図 11 同車両に載せられた N1 と N3 の相対位置の水平誤差 Figure 11. Horizontal errors of relative position between N1. and N3 (two receivers on the same vehicle). 10. GPS Relative Positioning Error. 5 north error (m). north error (m). 5. 0. -5. -10 -10. -5. 0 east error (m). 5. -10 -10. 10. 0 east error (m). 5. 10. GPS Relative Positioning Error. 10. 5 north error (m). north error (m). -5. (b) KF+CommSat, RMS=12.10m. GPS Relative Positioning Error. 5. 0. -5. -10 -10. 0. -5. (a) N受信機, RMS=37.03m 10. GPS Relative Positioning Error. 10. 0. -5. -5. 0 east error (m). 5. 10. (c) CoRelPos, RMS=6.48m. -10 -10. -5. 0 east error (m). 5. [1] P. Misra and P. Enge, “Global positioning system: signals, measurements, and performance,” 2nd ed. Ganga-Jamuna, 2006. [2] ASV4. [Online]. Available: http://www.soumu.go.jp/main_sosiki/joho_tsusin/policyreports/chousa/i ts/pdf/081219_2_si2-4.pdf. [3] 久保信明, “マルチパス低減技術の現状と動向,” GPS シンポジ ウム, 2005. [4] Yongcheol Suh and Ryosuke Shibasaki, “Evaluation of satellitebased navigation services in complex urban environments using a threedimensional GIS,” IEICE Trans. Commun., vol.E90-B, no.7, pp. 1816-1825, 2007. [5] Jun-ichi Meguro, Taishi Murata, Jun-ichi Takiguchi, Yoshiharu Amano, and Takumi Hashizume, “GPS multipath mitigation for urban area using omni directional infrared camera,” IEEE Trans. ITS, vol.10, no.1, pp. 22-30, 2009. [6] 湯素華, 筒井英夫, 大山卓, 三浦龍, 小花貞夫, “都市部におけ る高精度車車間相対測位手法, ” 信学技報, SANE2010-159, vol. 110, no. 425, pp. 1-6, 2010. [7] Suhua Tang, Nobuaki Kubo, and Masayoshi Ohashi, “Cooperative relative positioning for intelligent transportation system,” in Proc. ITST 2012. [8] 湯素華, 古川玲, 川西直, 長谷川晃朗, 三浦龍, 武内良男, “車 両 間 の 協 調 に よ る 高 精 度 相 対 測 位 の 研 究 開 発 ,” 信 学 技 報 , ITS2013-10, vol.113, no.163, pp.25-30, 2013. [9] 湯素華,川西直,古川玲,大橋正良, “高精度相対測位におけ る擬似距離送信の効率化について,” A-17-15, 信総大 2013. [10] Paul D. Groves, “Principles of GNSS, Inertial, and Multi Sensor Integrated Navigation Systems,” Artech House Publishers, 2007.. 10. (d) CoRelPos+, RMS=4.21m. 図 12 異車両に載せられた N1 と N2 の相対位置の水平誤差 Figure 12. Horizontal errors of relative position between N1 and N2 (two receivers on two vehicles).. 6. まとめ 協調相対測位手法は,近接する GNSS 受信機間のマルチ パス誤差に空間相関性があることを基に提案されてきたが,. ⓒ2014 Information Processing Society of Japan. 6.
(7)
図


関連したドキュメント
Keywords: continuous time random walk, Brownian motion, collision time, skew Young tableaux, tandem queue.. AMS 2000 Subject Classification: Primary:
This paper presents an investigation into the mechanics of this specific problem and develops an analytical approach that accounts for the effects of geometrical and material data on
The object of this paper is the uniqueness for a d -dimensional Fokker-Planck type equation with inhomogeneous (possibly degenerated) measurable not necessarily bounded
In the paper we derive rational solutions for the lattice potential modified Korteweg–de Vries equation, and Q2, Q1(δ), H3(δ), H2 and H1 in the Adler–Bobenko–Suris list.. B¨
While conducting an experiment regarding fetal move- ments as a result of Pulsed Wave Doppler (PWD) ultrasound, [8] we encountered the severe artifacts in the acquired image2.
Wro ´nski’s construction replaced by phase semantic completion. ASubL3, Crakow 06/11/06
Us- ing the Danilov-Stanley theorem to characterize the canonicale module, we deduce that the base ring associated to this polymatroid is Gorenstein ring... The notion of
Hence, for these classes of orthogonal polynomials analogous results to those reported above hold, namely an additional three-term recursion relation involving shifts in the
