研 究 報 告
デ
ジ
タ
ル
ビ デ オ カ
メ
ラ
を
用
い
た
矢 状 面 歩行 解 析
に
お け
る
マ
ー
カ
ー
位 置
の
計
測
誤 差
*鈴 木 良
和
1)佐 藤 春
彦
2)#下 田
隼
人
1)要 旨
民
生 用 デジ タ ル カ メ ラと ビデ オ 画 像 を簡
便 に 扱 え るパ ソコ ン の 普及 に よ り,
二次 元 での運 動 解 析 を 臨 床 で行 う
ことが可能
になっ た。
本
研究
で は, デジ タ ル ビデ オカ メラとパ ソ コ ンによる 簡 易 運 動 計 測システム の臨 床
に おけ
る適応 範
囲を 見極
め る た め,
矢
状 面 での歩 行
を 対象
に簡
易 運 動 計 測 システムで 得 られ る 関 節位
置座 標
と,
十/に 研 究 用 途で用い ら れてい る三次 元 動 作 解 析 システ ム で得 ら れ る 関 節 位 置 座 標 を 比 較 し,
その計 測 精 度 を 検
討 する こ とを 目 的 と し た。
対 象
は健 常
成 人男 性
9
名
(平 均 身
長169
、
9
±5
.
6cm
,
体
垂64.
1
±6.
2kg ,
年 齢
20.
1
±1.
3
歳
〕 と し,
各
被
験 者の股 関 節・
膝 関 節・
足 関節
・
つ ま 先 に赤
外 線 発 光マー
カー
を貼 付
し,
最 適 歩 行 速 度で歩 か せ た。
そ れ らの赤 外 線 発 光マー
カー
の矢 状 而にお け る 位 置 座標
の計
測 を,簡
易 運 動 計 測シス テ ムとE
次 元動作 解 析
システム と を同期
させて行
っ た。
簡 易 計 測
システムでは,
ビ デ オカ メラ での撮
影
時 に 生 じ る 視 差 を,
考 案
し た セ グメ ン ト変換 法
にて補
正す
るこ と も試
み た。
両
シス テ ムで 計 測 さ れ たマー
カー
位 置の軌 跡の.・
致 度 を 相 関 分 析で比 較 し た 結 果,
視 差の補
正の有 無に関 わ らず
,
股 関 節,膝 関 節
,
足関節
,
つ ま先
の位 置
座標
とも相 関 係 数
が0
.
95
以 上 と軌 跡
のパ ター
ンにおい て は,
高
い一
致
を 示 し た。
ま た,
セ グメン ト長の誤
差 は,
4
%未 満
であっ た。
両
シ ス テ ム の差の大
き さ と しては,
今 回の撮 影の 範 囲 設 定 (1
.
9m
×3
,
4m
)
におい ては,
つ ま先
の鉛直 方 向
座標 位 置
で,
視
差の補
正 を行
わ な い場
合’
ド均
2
.
5cm
の差 が見
ら れ た。 し か し な が ら,
視 差
の補
正 を行 う
と,
そ
の差
は1
.
5
cm に縮 小 し
た。 以 上の こと よ り,
矢 状 面 に お け る歩 行
を二次 元の簡 易
シス テ ム で計測
し た場 合
,
関節 位 置
の動 き
の パ ター
ン を 捉 え る ヒでは,
高 価 な 三 次 元シ ス テ ム と同 様
の傾向
を捉
える ことがロ亅.
能
であ
る が,
つ ま先
が床
か ら何
セ ンチE
がっ てい るか とい っ た,
距 離
の大
きさを議 論 す
る場 合
は,
カ メ ラ に よ る視差
を考 慮
に人れ る必要
が あ る と 示峻
さ れ た。
キー
ワー
ドモ
ー
ショ ンキャプ チャー,
二 次 元 解 析,
簡 易
運動 計
測 は じ め に理 学 療 法 士
は,
患 者
の歩 行 を 見 て 歩 行 障害
の原因
を推
察
した り,
治 療 効 果 を 判 定 し た り とい うこと を 日 常 的に行
っ てい る。 その方 法
は, 特 別 な 道 具 を 用いず 観 察
に よ っ て行
われ
るた
め簡 便
であ
る が,
検 者
の主 観
に 依存
し,
患 者
の歩 行
が 正常
か 異 常 かの判 断 は 熟 練 度 に 左 右 さ れ *MeとLsur 巳ment Erl
’
or of Markers Positicm Deτecting by a
Standardized
V[deo−
Based Analysis il1匸hc Sagit//at Plane 1) 北 單 大 学 大 学 院 医療 系研 究科Yoshiknzu Suzuki
、
RPT.
Hayato Shim〔〕da,
RPT:Graduate SchoD且of Medk二al SCicnce
、
KitasatO 1.
rllversitv 2) 北 里 大 学 医療 衛 生 学 部〔〒228
−
8555 神 奈 川県相 誉莫原市北里1−
15−
1〕
Haruhiko
Sato,
RPT,
PhD:School of Allicd Health Sciences.
KitasaLO
University #
E
・
mait:haru
@kiLasato・
u、
ac.
jp
(受 付 口 2〔}07年2月5日/ 受 理日 2〔xo8年1月29日 ) る 1)L)
。
・
方,
歩行
分析
の客 観
的 なデー
タ収 集
の方法
と して研 究
室な
どで用
い ら れる三次元 動 作 解 析 装 攪
や床 反
力 計
を用
い た方法
があ
る。 こち ら は 運動
を定
量的
に捉
え る こと がで きるが,
非 常
に高価
な ため機 器
を導 入
し て ま で歩 行 分 析
を行 う施 設
は 限 ら れている、
t市
販の ビ デ オ カメ ラは 患者
の姿勢
,
運動
を記 録 す
る媒
体 と して臨 床で も よく使
用 さ れてい る。
般的
に は繰 り
返 し動 作
を観 察 す
る とい っ た用 途
に用
い ら れるが,
そ
れ 以外
に も ビデオの フ レー
ム を数
え るこ とで,
1
歩 行 周 期
峙 間 を 計 測 し た り,
ビデオ画像
をパー
ソ ナ ルコ ン ピュー
ター
に取 り込
み画 像解 析
ソ フ トでド肢
の関節 角 度 を測 定
し たり
とい っ たことで用
いるこ と ができ
る3〕。
近
年
では動 画
を扱
えるパソ コ ンが普 及
したた め,
パソ コ ン とビ デオ カメラに よる簡 易 運動 計 測
シ ス テムを構 築
す
る こ と が容 易
に なっ た。安 価
な シス テ ム の登 場
により
,
90 理学 療 法 学 第
35
巻 第3
号今 後
は 歩 行の定
量 的 評価
と して,
積 極 的 に 活 用 さ れ るこ とも期 待
で きる。
し か し な が ら, 臨 床で記 録 さ れた画 像 か ら位 置
のデー
タ を抽 出
し た 場 含,
どの程 度
の精 度
が確
保 さ れ る か といっ た 情 報 は 広 く知 ら れてお らず,
実 用 に いたっ ていない.
ビデ オで記
録 し た 画像
に 生 じ る計
測誤
差 に は,
カメラ の基 本構
造 その ものに 依存
す る 姜 因 や 撮 影 卜 (被 写 体 まで の距 離 撮 影 面 像の大 き さ )の 要 因 が あ る。
ま
ず
,
カメラ の基本 構
造(
絞 り
,
レンズ,
フィ ル ム ) に よる要 因 を 整 理 する。
カ メ ラか らの距 離
の異 なる2
つ の物 体
を同 時
に撮 影
し た場 合
,
絞
り を開 きす ぎ
る と片方
が不 鮮 明
にな
る という問 題
があ
る、
これ は2
つ の物 体
が カ メ ラ の被 写 界 深 度
4−
6〕の範 囲 内
に お さまっ てい ない ため であ
る。 レンズは,
屈 折 誤 差 (
収 差 )
の問題 を持
つ た め,
歪んだ画像
をフ ィル ム に写
し出
して しま う可 能 性
があ
る、.
フ イル ム にあ
た る デ ジ タ ルビデ オ カ メ ラ の電 荷
結 合 素 子
は,
その画素 数
が少 なす ぎ
る と低
い画 質
とな
っ て しま う
。
以E
の絞 り
,
レン ズ,
フ ィ ル ム といっ た構 造
上 の問 題は,市
販 さ れてい る デ ジ タ ル ビデオ カ メラに お いても ト分 改 善
さ れ ている。 そ し て, 同様
の問題
は,
カ メラを使 用
し た三次元 動 作 解 析 装 置
でも生
じる問 題
であ
る た め, デジ タ ル ビ デ オ カ メラとパ ソ コ ン に よ る簡 易 計
測 シ ステム特 有
の問 題 と は な ら ない。
誤 差 を生
じ る要
因と
して,
別 に撮 影
上の 問 題 があ
る。
例え
ば,歩 行
を矢
状 面 か ら撮影
した際に カ メ ラ に近い側 の下肢
に対
し てカ メラ か ら遠
い側の ド肢
が短 く見 え
て しま う
という
現象
があ
る。
これは.
ビ デ オカ メラで撮 影
さ れ た画像
の中で は, 同じ大 き
さのも
のでも
レ ンズに近
いも
の と遠
いも
ので大 き
さ が異
なっ て見 え
て しま う視 差
が存 在 す
るため であ
る。
この視 差
は,
カ メ ラか ら4
.
51n の 距離
か ら撮 影
した30cm
の棒
をカ メラ から ユOcm
近
づ け る か遠 ざ け た 時
に1cm
程 度 生 ず
るこ とも あ
る ”/
、
, つま
り
,
その ような実 空 問
での位 置座 標
と画 像
E
の見 え方
の違
い 〔視 差 )
のた め,
安 価
なビ デ オ カ メ ラ で は定
量的
な計 測
は期 待
でき
ない とあ き
ら め る向 き もあ
る。視 差 を取 り除 く方法
とし
て,
乎 前側
のド肢
と.
奥側
のド
肢
の光
が レ ンズに人射 す
る角 度 を
でき
るだ け等
しくす
る た め にカ メ ラ と対 象者
との距 離 を遠 く離 す
という 手段 も
あ
るが,
この場 合
,
視 差
は小
さくな
っ ても識別
でき
る最 小
の大 き さが増 し,
計
測精 度
が悪 く
なる。
位 置
を:一
三次
元 で捉 え
るDLT
法
(Direct
linear
transformation
method)
8}を使 え
ば視 差
は考 慮
しな く
て よく な
るが,
DLT
パ ラメー
タの算 出
は,実 空
間座 標
と画像
上 の座 標
との関係
か ら導
か れ る複 雑
なも
の で,
市
販のビデオを 少 な く
とも
2
台
同期
して撮 影
しな け
れ ばな
らな
い という制 約 もあ り
,
臨
床
で手軽
に用い ら れ る方 法
とはい い にく
い。 そ こ で今
回 は,
人体
の左 右
下肢 長
が同
じ長
さ と見
立て る セ グ メン ト変換 法
により奥行 き
の問 題
の解 消 を試
みた。 本 研 究 で は,
ビデ オ カメ ラ とパ ソコ ンに よ る 簡 易 運 動 計 測システ ムの 臨 床 に お ける適 応 範 囲 を 見 極め る ため,
矢
状 面 での歩 行
に お け る 関節 位
胃座
標 を簡
易 運動 計
測 シ ステ ム と 三 次 元 動 作 解 析 シス テム と を 同 期 さ せて計 測 し,
両者
で関節 位 置
の軌 跡 が どの程 度一
致 してい る か を 検 討 し た,
ま た奥
行 き補 止の有 無で,
関 節 位 置 座 標の 計 測 値に どの程 度の差 が 生 じ るのか も 確 認 し た。
方
法
ユ,
対 象
整 形外 科 疾 患
,
中枢 神 経 疾 患
を有
さ ない健 常 男 了
・
大学
生9
名
〔平 均 身 長
169
.
9
±5
.
5cm
,
平 均 体
重64
.
1
±6
.
lkg
,
平 均 年 齢
20
.
1
±1
.
3
歳)
を被
験者
と し た。
被 験者
には,
本 研 究
の主旨
を書 面及
び凵頭
で説 明
し同 意
を得
た。
2
,
測 定 方 法
本研 究
で は簡 易 運 動 計 測
シス テ ムと して,
デ ジタ ルハ イ ビジ ョ ン ビ デ オ カ メラ(
GR
−
HDI
:Victor
社 製
)1
台
とパ
ー
ソナルコ ンピュー
ター
(Dell
Dimension
DXCO5
ユ:工ntel
Pentium
CPU
3.
O
GHz ,
l
GB
RAM
>
か らな
る シ ス テ ムを構 築
した。
今
回 川いた デ ジ タ ルハ イビジ ョ ンビ デ オカ メラ は,
撮 影 素
子 がレ3
型
プロ グレッ シ ブ118
万
画 素
CCD ,
F
値
がF1.
8
〜
F22
.
e
,
シ ャッ ター
ス ピー
ドが
1A5
〜
1
〆ユ000
,光
学 ズー
ム が ユ0
倍
で可能
な性
能の も の であ り
,
ピントの調 節
は自動 調 節 機 能 を用
い て,
光学
ズー
ム機 能
は用
いず 撮 影
し た。
矢 状 面
で の歩 行
を撮 影 す
る た め,
ビデ オ カ メ ラ は床 面
か らL2m
の高
さ0)位 置
に歩
行
の進 行方 向
と垂 直
とな
る よう
に,
歩 行路 か
ら51n
離 れ
た位 置
に設 置
し,
計 測 範 囲
は進 行 方 向
で3
.
4m
,
高
さ1
.
9m
とし た(
図1
)
。同時
に,
三次 元 動 作 解 析
シ ス テ ム(
OPT
()TRAK
3020
:Northern
Digital
社 製)
を川
いて,
三次 元位 置
デー
タを収 集
し た。
=一
次 元 動 作 解 析
シ ス テ ム も ビデ オ カ メ ラと 同様
,
進行 方 向
と 垂直
な位
置に設 置 し た。計 測 周 波 数
は,
簡 易 運 動 計 測
シ ス テム は6011z
,
三次
元動 作 解 析
シ ス テ ムは12011z
に設 定
した。
簡 易
シ ス テ ムと三次
元動 作 解 析
シ ス テム の同 期には,
同 期 装 置 (
PH
−
100
:デ ィ ケ イエ イ チ社 製
) を用
い た。
具 体 的
には.
同期
装置
の発 光 が ビデオ 画像
に 映 り込 む よう
に ビデ オ カ メ ラと対 峙
さ せ て設置
し,
発 光 と 同 時に同期 装 置
か ら出 力 さ
れる同 期 信 号
をAD
変 換 機 (
OPTO
−
TRAK
L
)ataAcquisition
Unit
ll
;Northern
Digital
杜製
) を介
し て 三次
元動
作解
析システムを 制 御 す るパー
ソナル コ ンピュ
ー
ター
(
Dell
Dimcnsion
:lntel
Per
]tiurnW
CPU
2
,
8
GHz
,
512
MB
RAM
) に取
り込 ん で 同 期 さ せた
。
歩 行
の条件
を揃
え る た め,
被
験者
が履
く靴 はゴ ム底の1
.
9m73
.
4m驫
畜
讌
薦 ダ
i
鷲欝
”
♂
串
.
°5m 註 偽 穿 誓 … 〆
,
囁
早
炉
嚀
雫
魚
鈩
广
p
く
マ
サ
げ
.
、
靉
選
ン
丶
婦ノ
ー魂
尋
錫
塚
.
ノ d 1.
2mノ
/ 一 一濁
C 図1 実 験 装 概の概 妛.
三次 元動 作 解 析装 置 との同期 を取 る た め,
ビ デ オ カ メ ラ に 「司期 を 知 らせる発 光が写しこまれ る よう同期 装置
を歩 行路の後 方
に 設 置し た.
〔a :被験 者,
b
:同 期 装 置,
c :デ ジ タル ビデ オ カメ ラ,
d
: 三次元動 作解 析装 置) 灰 色で示し た部分は,
カメ ラか ら5m は な れ た位 置における撮 影 範囲 (キャ リ ブ レー
ショ ン面 ) を示 す.
被 験 者
サ イ ズに合
わ せて着 用
させ た。
ま
た.
被 験 者
の服
装 は体
に密 着 す
る シャ ツ とスパ ッ ツ とした。
関節 位
置の同 定
のため に使 用 す
るマー
カー
は, ビ デ オ カメラ で 認 識 しやす くす
るため に反射
テー
プを巻
い た直 径
3cm
の球
状
のマー
カー
の 上に, 三次 元 動 作 解 析システ ム用の赤外
線 発 光
マー
カー
を貼 付
し たも
のを使
用 し た。
マー
カー
の貼 付 部 位
は左 大 転
子,左 膝外
側 関節
裂 隙,
左 外
果,
左 第
5
中
足骨 骨
頭 と右 膝内
側 関 節 裂 隙,
右 内果
,
右 第
工中
足骨 骨 頭
の合計
7
箇 所
.
と し た。
貼
り付
け に は 両 面 テー
プ と サー
ジカ ル テー
プを使
い,
左 大 転 子
はスパ ッ ツ の 上 か ら,
左藤 関 節 外 側 裂 隙
,
左 外
果,右膝 内
側 関 節 裂 隙, 右内
果 へ は皮 膚
上に直接
,
そ して,
左 第
5
中 足 骨 頭 と右 第1
中足 骨 頭
へ は靴
の上か
ら固 定 し
た、
,
歩
行
の際
,
被 験 者
に は腕
を胸
の前
で糾
ませ,
視線
は前方
に向 け
るよう指 示 を与 え
,
快 適 速 度
で歩
か せ た。
歩 行
の試行 回数
は3
回 とし,
全 試 行
に おい て左
ド肢 がカメ ラ の 手 前 側,
右
下肢
が カ メ ラ の奥
側になる よう
撮影
した(
図
1
)
U簡 易
運動 計 測
シ ス テ ム で は,
ビデオで歩 行 を撮 影 後
,
その画像
を動 画 取 り込
み ソフ トCCapDVHS
:Dclphi
6.
O
PersonaL
)
を用
い てパー
ソナルコ ンピュー
ター
に取 り込
み,
1
秒 間
60
フレー
ム の画 像
に変 換 し
た。
マー
カー
位
置の計 測には 画像解 析
ソ フ ト 〔Scion
image
:Sci
〔}n案
1
:製 )
を 用いた
。
画 像 解 析
ソ フト
で は距 離 を
ピク セ ル(
画 素 )
数で表
す た め,
これ を実 際
の距 離
の単位
に換 算す
る必 要
が あ る,
そのた め,
今
回 はあ らか じ め被 験 者
の左 大
転 子 と左 膝 裂 隙の マー
カー
間
の距 離
を巻 尺
で ミリメー
トル 単位
に て 計 測 し対 象 者
の左側 下肢
を キャ リブレー
シ ョ ン面
o o 〔XI
,
YI
)魂
詔
A
. .凋
・ 0⇒
°1
⇒
°B
購
゜ . 0 (X11,
Y「
三)G
図2 セグメ ント変 換.
による視 差の補1トA
,
簡 易 運 動 計 測シ ステムで計 測 し た右 膝 関 節 位 置 (Xl
,
Y1
) と 右 足 関 節 位 置(X2
,
YLt).
B,
右 膝関節と右 足関節.
によ り作ら れ る 下腿 軸と鉛 直 軸とのな す 角θ,
左 膝 関 節と左 足関節のマー
カー
問の距離L
を 算 出 する,
C.
L とθ に よ り補正され た右 足 関 節 位 置 を (Xlz,
Ylz)とする.
とし た。 こ の換 算
に よ る理論
上 の計
測精 度
は約
5mm
であ
っ た。簡 易 運 動 計 測
システムと三次 元 動 作 解 析
システムで収
集
した運動
デー
タ は,Bryant
の フ ィ ル タを 用い て, 遮断 周 波 数
6Hz
に て 平 滑 化 し たv.
/。
ま た, そ れ ぞ れの デー
タは1
歩 行
周期
で正規化
し た。
3
.
角罕湘f
方 法カメ ラ の レ ンズ か ら 見て
奥
側にあ る 下 肢の視 差 を補
正 す る た め,
左右
の 下肢
の長
さ(
セ グメ ン ト長 )
が等
しい と仮 定
し,
短 く写
る奥
側の ド肢
の座標 位 置
を補
正す
る セ グメン ト変 換 法
を考 案
し た (図
2
)
、
t 以 卜.
に詳 細
を 述べ る,
,
奥
側の下 腿の長 さ を 反 対 側の下 腿の長 さ と 同 じ と仮 定
し,
手 前
側の下 腿の 長 さL
と奥
側の 下 腿の角 度デー
タ θ を 用い て,
次の式 (
1
)
,
(
2
)
に よ り新
た に そ れ ぞ れのマー
カー
座 標 を 算 出 し,
実 際の大 き さ に 補 正 し たuX2 =
X
、+Lsin
θ ゾ2≡
yL
÷Lc
・s θ………・
(1
)
…・
(
2
)
Xl
とYl
は 補 正 前の右 膝 関 節マー
カー
の位 置 座 標で θ は右 膝 関節
と右内果
を 結ぶ線 と 鉛直軸
との なす 角 度
であ る/
.
tL は 左 膝 関 節 と左 外 果のマー
カー
間
の距 離
を表
し,
補
正 さ れ た右
足 関節
の座 標値
がX
’
z,
Y12
である。
簡 易 運 動 計 測 シス テム の妥 当 性の
検 討
の た め に,
簡 易
運 動計
測 システムと 三 次 元 動作 解
析 シス テ ムか ら得
た そ れ ぞ れの マー
カー
座 標
の軌 跡の一
致
を 見 る た めに,
重相
関 係 数1 ω と単
相関係 数
1〔,)11)を 川い て検 討
し た。 重相
関 係数
は, 三次
元 動作 解
析 シス テ ム で計測
し た位 置
座標
を 実 測値 (
真 値
) と仮 定
し,
同一
.
試 行 を簡 易
運 動計
測シ ス テ ム で計 測 し た位 置
座標
を推 定 値
と仮 定
し た場 合
,
推
定
値 が ど れ ほ ど 実 測値
と致
してい る か を示 す
もの であ
る。
単 相
関係 数
は,
三 次 元 動作
解 析システムで計 測 し た92
理 学療 法学 第35
巻第3
号G
3
A
週
lo
振
橸0
0
0
0
0
1
(
目 δ)
豊蓴
銀
榔O
B
20
40
60
80
歩 行 周 期 (
%
)
100
図3 右つ ま先マー
カー
の軌 跡の一
例 実 線は 三次元 動 作 解析システム,
破 線は簡 易 運 動 計測シス テ ムか ら得た鉛 直 方 向に おける右つ ま先のマー
カー
の軌 跡 を示 す.
A :補正前は,
両シ ス テ ム で捉 えたマー
カー
の軌 跡のパ ター
ン は類 似して い るが,
大 きさ は異 なっ て いた,
こ のような 場 合は単 相 関係 数r は高f
直を示し,
重相 関係 数Rは低 値を示 す,
B : 補 正 後の軌 跡 は,
A
と比べ てパ ター
ンが 類 似 した ま ま2
つ の波 が 近づ き,
A
と 比べて左 き さの差 も小 さ くなっ た,
こ の よ う な場 合 は単 相 関 係 数r,
重 相 関係 数R
共 に高 値 を示す.
位 置 座 標
と同
一
試 行 を簡 易 運 動 計 測
シ ステムで計 測 し
た位 置 座 標
で,
値
の変 化
の度 合
い (パ ター
ン)
が どの程 度
致
し てい る か を表
し てい る。す
なわち
,
重相 関 係 数
は波 形
の一
致 度
を示
し,
単 相 関 係 数
は波 形
のパ ター
ンの類
似 度
を示 す (
図
3
)
。簡 易
運動 計 測
シ ス テ ム とF
次 元動 作 解析
シ ス テム の誤
差
は,
1
歩 行 周 期 中
に両
シ ス テム問
に生 じ た差
の絶 対 値
を平均 す
ることで示
した。具 体 的
な計 算 式
は式
(3
)
に示 す
。
マ
ー
カー
位 置 堅 標の差d − ⊥
Σ
焦
、厩
一
劃
…
鵠 は 三
次
元動 作 解 析
シ ス テ ム で計 測
さ れ た位 置
座標
,
濺
は簡 易
シス テム で計 測 さ
れ た位 置
座標
,
n は1
歩 行 周
期 中
の計 測
デー
タ の総 数
を示 す
。ま た
,
三次
元動 作 解 析
シ ス テ ム によ り測 定 し たセ グメ ント長
li
と比
べ,
簡 易 運動 計 測
シ ス テムで計測
し た同 様
の セ グメ ン ト長
li
に どの程 度
の誤
差 が あ る か を確
か め るため,
2
つ の シ ス テムで計 測
さ れ た1
歩行
周 期の セ グ メ ン トの比
を式
を用
い て求
め た。 このセ グメ ン ト 比 を左 右
の大 腿
,
下 腿
,
足 部
の各
セ グメン トに関
して算
出
した。
セ グ・ ン ・・峠
Σ
掛
・・…・
…・
一
…
(・・
邑三
次
元動 作 解 析
シ ス テムで計
測 し た 試 行 中,
マー
カー
が
カ メ ラ で捉 え
ら れず
デー
タ が欠 如
し,
1
歩 行 周
期分
の デー
タ が抽 出
で き な かっ た試 行
に関
して は 分析
か ら 除 外 した。
分 析
か ら 除外
さ れ た 試行
は 全部
で2
試 行,
.
被
験者
ユ人 あ
たり
2
か ら3
試 行
を分 析
に用
い,
9
名
の対 象 者
か ら合 計
25
デー
タ収 集
し た。簡 易
運動 計 測
シ ス テ ム で計 測
され たマー
カー
位 置
と,
三次 元 動作 解 析
シス テム で計 測
し たマー
カー
位 置
の差に関
して,
各 関 節
に お け る 差 をTukey
の多
重 比 較 を 用い て検 定
し た。
比 較には 統 計 処 理ソ フ ト(
SPSS
l5
.
OJ
for
Windows
:SPSS
Japan
) を用
い た。
有 意水 準
は5
%未 満
と し た。
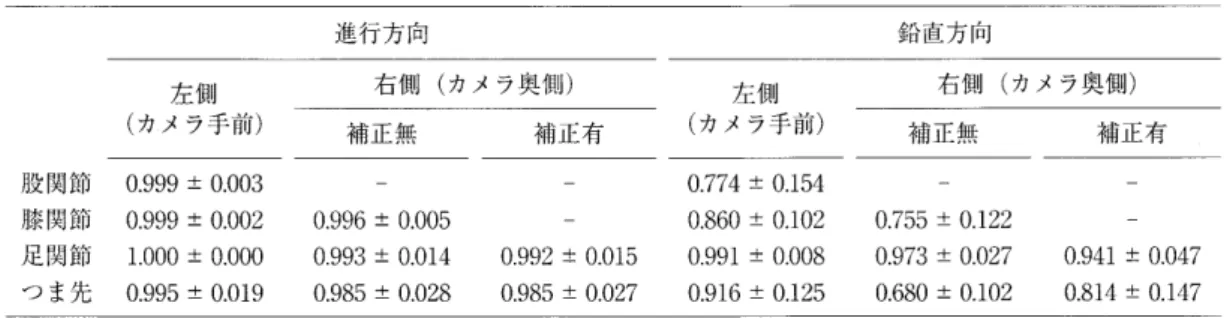
結
果
簡 易
運動計
測 シス テ ム と 己 次 元 動 作 解 析 シス テムで 得 た1
歩 行
周 期で の各
マー
カー
座
標の進 行 方 向 成 分
の重 相
関 係 数
R
は,
全て0
.
95
以 上 と高
かっ た(
表
1)
。
鉛直
方
向
成分
では,
視 差の補 正 を 行う
前
の右(
奥
側)
つ ま先
の 座 標にお け る簡
易 運 動計
測 システ ムと
ミ次
元動 作 解 析
シ ス テ ムの 重相 関係 数
がO
.
68
と,左
(
カ メラ 側)
つ ま先
の重相
関 係 数 よ り小 さ かっ た が, 視 差の補
正後
は重 相
関 係 数 が0
.
8
以 上 に向
上 し た (表
1
)
,
,
表
2
に,
簡 易
運 動 計 測システ ム と 三次 元動作 解 析
シ ス テ ムで 計 測 さ れ た 座 標値
の鉛直 方 向 成分
の.
.
.
致 を単 柑 関
係 数r で示 し た。
補 正
の有 無
に 関 わ らず
,
全
て の マー
カー
位 置
で祁 関 係 数
が0.
95
以E
と,軌
跡のパ ター
ン の高
い・
致 を 示 し た(
表
2
)
.
簡 易
運動 計測
シス テ ム で計 測
さ れ たマー
カー
位 揖
と,
.
三次 元 動作解 析
シス テム で計
測 したマー
カー
位 置
の差
の 大 き さd
は, 鉛直 方 向 成分
に おい て カ メラ手前
に写
る左
股 関節
で0
.
9cm
,
左 膝 関 節
でO.
.
9
cm,
左 足 関 節
で0
,
6
cm,
表
1
簡
易運動 計測 システムと 三次元動作解析
システムで得た各
マー
カー
座 標の電 村 関 係 数R
進行 方 向 鉛直 方 向 左 側 (カ メラ手 前 ) 右側 (カ メラ奥 側) 左 側 (カ メラ手 前) 右 側 (カメ ラ奥側) 補 正 無 補 正 有 補 正 無 補 止 有 目殳関 負行 〔〕.
999 ± 0.
003 胴ミ関ll
’
t’
j O.
999 ± 0.
002 足 関 節 1,
QOQ
±Q
.
000
つ まJE
O
.
995
±0
.
Ol9
一
〇.
996± 0.
005−
0
.
993
±0
,
014
0
.
992
±0
.
015
0
.
985
±0
.
028
0
.
985
土0
.
027
0.
774 ±0
.
154−.
O.
860 ± 0.
102 0.
755 ± 0.
122−
O
.
991=
〔〕.
0〔〕8 0.
973 ± 0.
027 0.
941 ± 0.
0470
.
916
±0
.
125
〔}.
680
±0
.
ユ02
0
.
81
,
1±0
.
147 (mcan ±SD
)表
2
簡
易運動計
測 システムと 三次元動作 解析
システムで得
た各
マー
カー
座標の単 相 関係 数厂 進 行 方 向 鉛 直 方 向 左 側 (カ メラ手 前 ) 右 側 (カ メ ラ奥側) 左 側 (カ メ ラ手 前) 右側 〔カメ ラ奥 側 ) 補 正 無 補 正 有 補 正 無 補 正 有Il
殳関 食行0
.
999
:
ヒ0
.
000
膝 関 節 1.
000± 0.
000 足閼節1
.
000
±0
.
001
つ ま先 0.
999± 0,
001一
1.
000± 0.
000−.
1、
000
=0
,
000
0
,
999
±O
.
OOl
O,
999± O.
002 0.
999 ±0,
0020
.
957
± (,.
034
−
〔}.
986 ± 0.
Ol3 0.
963± 0.
024−
0
、
994
±0
.
007
0
.
992
±0
.
009
0
.
991
±0
.
010
0.
956 ± 0.
092 0.
967±0.
032 0.
926 ±0.
080 (mean ±SD
) 表3
簡 易運動 計測 システムと三次元動 作 解 析シ ステムで得た各マー
カー
位 置の差d
(Cln) 進行 方 向 鉛直 方向 左側 (カメ ラ于 前 ).
右i
則 (カメ ラ奥側 ) 左 側 〔カ メ ラ予前 ) 右側 (カメラ奥 側) 補 正 無 補正 有 補 正 無 補正有 股 関 節1
.
07
±1
.
00
膝関節 1.
ll± 0.
89 足関節
1
.
92
±1
.
33
つ ま 先 ⊥.
89± 1.
692
.
53
±1
.
10
*2
.
45
±1
.
85
* * 3.
02 ± 2.
813
.
15
±1
.
69
3.
70 ± 2.
580
.
90
±0
.
50
0.
88 ± 0.
・
110
.
56
±0
.
23
0.
64= 0.
3工1
.
26
±G
.
49
*−
2
.
14
±Q
,
43
*1
.
40
±1
.
00
† 2.
50土 O.
55*1
.
63
±1
.
021
(111eall 土 SD) * :左 側 (カメ ラ手 前 側 )との有 意差 (pくO.
05) † :右 側 (カメ ラ奥 側 )補正 無 し との有意 差 (p
< 0.
05) 左つ ま 先で0
.
6Cm
であ
っ た(
表
3
)。視
差の影 響
を受 け
る カメ ラ奥 側
のマー
カー
で は,
右膝 関 節
で1
.
3cm
,
右 足
関節
で2
.
1
Cin,
右
つま先
で2
.
5
cnl,
と全
て の部位
に おい て カ メ ラ手 前
側の関 節
マー
カー
に おけ
る差より
カ メ ラ奥
側 に お け る 差のほう
が有 意
に大 き
かっ た(
表
3
)
。右 側
.
ド肢の視
差の補
正の有 無
で比較 す
ると,
足
関節
,
つ ま先
におい ては,
視 差の補
正 を するとd
は2cm
以下
と なり
有 意
に差 は減 少
し た(
表
3
)
。進 行 方
向
成分
で はカ メ ラ手 前
に写
る左股 関 節
が1
.
1cm
,
左 膝 関 節 が1
,
1
cm,
左 足関節
がLg
cm,
つ ま 先 が1
.
9cm
で あっ た(
.
表
3
)
。
視
差の影 響
を受 け
る カメ ラ奥
側のマー
カー
で は,
右 膝 関 節
が2
,
5cm
,
右 足 関 節
が2
.
5cm
,
右つ ま 先 が3
,
0
cm と,
全て の部 位におい て カ メ ラ手前
側の関節
マー
カー
に おけ
る 差 より
カメ ラ奥 側
にお け る差
の ほ うが 有 意に大 き かっ た(
表
3
)。
こ の差は補
正 を 行っ て も縮 ま ら な かっ た(
表
3
)
。
左
右の下 肢セグメ ン ト長の比較
は,F
次 元 動 作 解 析
シ ス テ ム で計測
したセ グ メ ン ト長
に対
し,
カ メ ラ手 前
側の セ グ メ ント長
は大 腿 長
はユ00
.
3
%,
下 腿 長
は96
.
9
%,
足
長
は ユOO
.
J「%であ り
,
平 均
99
% であ
っ た。 そ れ に対
して,
奥 側
下肢
に関
して は大腿 長
は95
.
4
%,
ド腿長
は96
.
7
%,
足 長
は96
.
0
%
であ り
,
平 均
96
%の長
さ と と ら え,
奥 側
下肢
で4
% の過 小 評 価
が認
め ら れた。
考
察
ビデ オとパ ソコ ン に よ る
簡 易
運動 計 測
シ ス テ ム で捉
え た歩 行 時
の矢
状面
で のマー
カー
位 置
の軌跡
は,
これ と 同期
して計 測
し た 三次 元 動 作解 析
シス テ ムに よ るマー
カー
位 置
の軌 跡
と 比較
し.
各 関 節 位 置
と も相 関 係
数 がO
.
95
以 上 と 高い・
致 を 示 し た。
市 柑 関 係 数 も,
カ メ ラ手 前 側 につけ
たマー
カー
位 置
につ い ては,
股 関 節
,
膝 関 節
を除
き0
.
90
以 上 と高
い値
を示
した。
Kadaba
ら12)は,
三次 元動作 解 析
シ ス テ ム を用
い て歩 行
を計 測
し,
矢
状 面 上の関 節 角 度
の一
致につい て同
一
被験 者
におけ
る 日内
お よ び94
岬 学 療 法 学 第35
壱 弟3
号日間変 動
の面
か ら再 現 性 を重 相 関 係 数
で評 価
した.
そ れ に よ ると,
口内 変 動
は平 均
O.
9
.
7
以L
,
目 問変 動
は 平均
O.
93
以上 と なっ てい た。本
研究
で はビデ オ と赤外 線
と 異な
る方 式
によ る計 測 機 器 を 用
い てい る にも
か か わ らず
,
同じ機
器を使っ たKadaba
ら 12) が 示 し た 重 相 関 係 数 と同等
の水
LL
にあ
る。
この こ と は, ビデ オ とパ ソ コ ン という簡 易
運動
。[
測 システム で も,
三 次)tgh
作 角+析シ ス テム に 近い 関 節 位 置の 矢 状 面E
の 軌 跡 は 正確
に 捉 え ら れ るこ と を 示 してい る。
簡 易 運 動直「測 システム で も
,
三次 元動 作 解析
シ ス テム で計 測 した 勧 合 と 同 様に歩 行 時のマー
カー
位 置
の軌
跡の パ ター
ンと大 き さの傾 向
を捉
え ら れるが,
両
シ ス テ ム の 位置
座標
の差 を見
た場 杏
,
そ の鉛 直 方 向
の差の大き
さ は カメ ラ手 前 側で平 均
工cm 以 卜.
,
進行 方 向
の差の大
きさ は カメ ラ手 前側
で平 均
lcm
か ら
2cm
であ
っ た,,
将
に歩
行
に おいて は矢 状 面
上で の変 位
が大
きい。B
位
,
す なわち足 部
の方
が股
関節
より
シ ス テ ム間に おける差
が 大 き くな っ た。 こ の ような 差
が生
じた要
因 に は,
而シ ステムの計
測精 度
だけでな く,
シス テ ム間の 同 期 に よ る もの も 含 ん でいる の で,
その差
が その ま ま真の マー
カー
位 置との誤差 を示 す も
ので は ない。
し か しな が ら,
今
回使
用 した一
三 ナ 元 動 作 解 析 シ ス テ ム で の 詩 測 精 度 はカ タロ グF.
0,
lmm
であ るの に 対 し,一・
方
の簡 易
運動
,11.
測 シス テム の理諭
上の 計 測 精 度 は5mm
と 大 きい こ と か ら,
その差 は簡 易 運 動 計 測シス テムの計 測 梢 度の 限 界 に 由 来 してい る と 思わ れ た。
簡 易 運 動
ゴ[
測
シ ステムは,
本
A
三次
元のも
のを
二次
元 で捉 え
てい るの で,
奥 行
きの あ る 物 体の1E確 な 位i・1.
の把握
に は限 界がある。
オ
研究
に おい て も, キャ リブ レー
シ ョ ン面
E
の手前 側
下肢
に おい て は,
ユ% 以 ドの点 差
でセ グ メ ン ト長を計
測で きるが,
曳
行 きの 影 響 によ り小 さ く見
える奥 側
の下肢
の セ グ メ ン ト長
で4
% の 』差 が生 じ た。鉛 直方 向
の位 置
の誤 差
に 関 し ても
,
カ メラ手 前
側 で平 均
lcln
以 ドなのに対
し,
カ メ ラ臭
側で平 均2cm
か ら3cm
と誤
差が大
きかっ た。
こ の よ
うな 臭行 き
の問遜
に対 処
し て簡易
運動
。]
.
測
シ ス テ ム を臨 床
で用い る場
合に は次の よう
な もの が あろ う。
まず
一
つ 日 は,
奥 行 き
に よ る誤差
は,
レ ンズの特 性
か ら予測
でき
る の で適 用 範 囲 を見 極
め る ことであ
る、
,鼻 行 き
に よ る視
ftは,
カ メラか ら キャリブ レー
シ ョ ン 面 まで の距 離
とカ メ ラ か ら測 定
した刔
.
象 物 ま
で の距 離
の比
に より
,
直 線 的
に変 化 す
る 4)7)た め,
その こ とを
ふま え
,
測 定
環境
か ら計
測 誤差
を 予 測 し,
適
用 を見
べらない こ と であ
る。
もう
・
つ は,
視
差 を補
止す
る方法
である。
その方 法
と して今
回は特 別 な設 定 を必 要
と しな
いセ グ メ ント変換 法
を 用いた,
,
こ の よう
な簡 便
な視 差
の補
正でも
,
鉛
直方 向
で は二
n業 を減
らす
ことが で きた。 セ グ メ ン ト変換
法
は鉛 直 方 向
の奥行 き
の補
正に有 効
であ
ろう
.
、.
簡 易
運動 計
測 システ ムを 用いて位 置計
測 を 行う
限界
と し て は,
矢
状 面 での 解 析 で あ る た め,
当 然の こと と して 回 旋 及 素 を捉 え ら れ ない という
問 題 も あ る、
簡 易
運動 計
測 シス テム で も各
関 節lhu
“
の 運動
パ ター
ンは捉
え ら れる が,
II1
暁 要 素 が 大 きい場 合,
例 え ば,
骨 盤の回 旋 が 大 き い場
合 は,
股関 節
の角 度 変化
も 正 しく捉
え き れ ない恐
れ も あるた だ し
,
これは.
三次 元勁 作 解 忻
シ ス テ ムを使
っ た.
1
.
測で も問
題になる点
で複 数
のマー
カー
を使 う
な ど,
r、
i
.
測 方 法
の1.
夫 が 必 要
であ
る とされ
ている 131以 ヒの こと を
考
え合
わ せ る と,
簡 易
運動 計
測シ ス テ ム に て歩 行 計測
を行 う
t
・
.
合
,
関節 位 榿
の軌 跡
のパ ター
ンと大 き さ
につ いて は,
F
次 元動 作 解 析
シ ステム と 同様
の傾
向
を提
える こ とがで き7」,
,一
方
,
マー
カー
位 置の計 測 訊 差につ いて は,
足部
で数
セ ン チ杠 度
生じ る恐れが ある こ と が伺 え
る。逆
に,
こ の こと を考 慮
し て デー
タを扱 え
ば,
三次
元 動作
解 析シス テ ムを 持 た ない施 設 で も,
パ ソ コ ン と ビデ オ に よ る 簡 易 運 動 貢1』
測シス テ ムを 用いた 運動 解 析
を 行う
こ とが で き る.
.
例 え ば,
歩 行 時 に お け る 下 肢 関 節 朔 度パ ター
ンな ど は,
臨 床におい て も 計 測 が 可 能で あろう
tt し か し な が ら.
つ ま 先 が床
か ら何
セ ンチ ヒがっ て い る か といっ た解 析
に 川い るこ と に は慎
重 に な るべ きであ る謝 辞
:本 研究
を行 う
に あ たり
,
ビデ オ カメ ラ のR
本 的
な 構 造や此 学 分 野に関 して多 大 な 助 言い た だい た 北 卑 大 学 人 学 院 医 療 系 研 究Ti・
感 賞・
運 動 統 御 医科 学
群 視覚 偏 報 科
学
の角
軍噂
教 授 に 深 く 感謝 致
し ま す。
文
献
1
)Eastlack
ME
,
Arvidsoll
J,
et α1
.
:Intarratar
raliabil1吐y ofvideotaped observational gait
−
anaLysis assessments.
Phys
Ther
71(6
>:465
−
472
,
1991.
2)
Brunnekreef
JJ,
vanUden
CJ
,
et αi
’
Reliabiti
{y 〔,f
i・
ideo
−
taped obserxation
.
ai gaH nnalysis lrl patienl〜 “ILh ortho.
ped t imPairments
.
BMCNIusc
しdosketet
Disord
6
(1
∂1
−
9
.
20053
) 対.
焦 栄 輝 デ ジ タル画 悸 ヒの 角 度 測定に お け る検者 間・
検石
IAji
,
;」頁’
「生.
理:r療 濯
、
イトf/18{
3
);167
−
171,
2003.
1}永 剛凵・
: レ ンズ が わ か る本,
口本 実 業 出版社,
東 京,
2002.
5
〕安 藤 幸 司:第42
同光と光の。
己録.
映1
象]nirtlnduszrial sci−
ncta 37〔7):96
102,
2005、
6
〕 安 胖 幸 司:第44
同光 と光の 己録,
映像 】1
目i艮bldustriat
sci−
eエlce 37〔9):84 89,
2005.
7
〕Chur
じhilt
AJ
,
HaltigaTi
PW
et al
、
:RIVCAM
;asimple
vidし,
・
bd
〜ed klncmat[c a〔]a1L〜’
s 「or cldnical
disorders
ofgait
.
Comput Meth Progralns Biomed 69:197−
209,
2002.
8) 石 田 明允
,
蹟川俊二・
他:身 体 運 動のバ イオ メ カニ ク ス.
:〜ロナ祉
,
東 京,
1997,
ppl29131.
9
〕上 )S和 た:臨 床 歩 行 分 析 入 [1∫.
医 歯 TH.
{版,
東 京,
199.
O.
⊥0) IiJ原 清 志 ;バ イオサ イエ ン ス の統1瞠,
甑 Lケ,
泉 京.
2005.
⊥⊥〕加 納 克己,
高 橋 秀人 :医’
k
:就ll十学.
改 定 第5版,
1癬 1:堂,
東 京,
2001.
kinematic,kineLic.and eLectroniyographic datain normat
adult gait.
J
Orthop
Res8:
383-392,
1990.
13) 1,SiinterDA/ Biomechanics and rnoLor centrol ef huinan
movement. third edition,
Johll
"iiley& Sons,NewJersey,
2004.
<Abstract>
Measurement
Error
ofMarkers
Position
Detecting
by
aStandardized
Video-Based
Analysis
in
the
Sagittal
Plane
Yoshikazu
SUZUKI,
RPT,
Hayato
SHIMODA
RPT
Graduate
School
ofMedical
Science,
Ki'tasato
Uhiversity
Haruhiko
SATO,
RPT,
PhD
School
ofAltiedHealth
Scienees,
Kitasato
University
Digital
video cameras and personal computers(PCs}
that allow video capture are widel}, used,so
it
has
becn
possibleto
do
two-dimensional
moi,ement ana]ysis usingtbis
equipment.The
purpose
ofthis
study wasto
evaluatet.he
accuracy of markerposition
detecting
by
a video-based systetn as eotnpared with an optical thrce-dimensional posltion sensor.Subjects
were9
healthy
aduLt men{mean
heighL
=
169.9
±5.6
cm, mean weight =64.1
±62
kg,
mean age =20.1
±1.3
years).
A
videe-based
system was constructed with adigitttl
video camera and a video capturePC.
'I'o
assess system accuracy, we uscd anOPTOTRAK
optical movement analysis systern torecord thepositions
of two-dimensional markers.
Refiective
markers and active markers were attached to thegreater
trochanter,lateral
and medialfemeral
condyle,lateral
and medial malleolL andthc
hcad
ofthc
first
andfifth
metatarsa]1)one.
Subjeets
were asked to walk at a comfortabie speed, and we then comparedthe
posit'ionsof Lhekinematie
data
collectedfrom
thedigital
video eamera and theOptotrak
system.We
attempted to modify thedepth
of the two-dimensionalimagre,
i.e.
to correctparallax error,
by
using the samelower
limb
Length
for
thc]imb
on thefar
sidc and that on thenear side of the camera,
To
quantitatively
indicate
thedegree
of accurae.y of the inarkerposition.
a simple correlation coeiiicient was calculated.In
eomparing thedata
between
the two systems, wefeund
high
correlaLion eoefficiellts(abox,e
O.95)
for
thchip,
knee,
ankle, toc markers evcn wlthoutparallax crror correetion.
The
great・est
difference
was observed at thefar
side verticalposition
oft.he
roe,The
difference
was2.5
cm ",ithouz paralLax correction;how・ever,
it
reduced rc)1,5
cm withparallax correction.
In
conclusion, trajeetoriesofjoint
markersin
zhe sagittal plane couldbe
measuredas