理学 療 法学
第
28
巻 第6号268
〜
274頁 (2001年 )報
告
端 座
位
に
お
け
る
側
方
重
心 移
動動作
の
運 動 学 的分 析
*藤 澤
宏 幸
1)星
文 彦
1)武 田 涼 子
1) 要 旨本 研 究
の 目的
は端 座
位
に おけ
る側 方 重 心 移 動 時
の筋 活 動 と運 動 力 学 的
関係
を明
ら か にす
る こ とであ
る。被 験 者
は健 常 成 人 男 性
10
名 と
し,
右
側へ 側方
重 心移 動
し た際
の左 右 脊 柱 起 立筋
お よ び大
殿筋
活動
,
圧中
心変 動
体 幹
ア ライメ ン トを測 定
し た。
側 方 重 心 移 動 動 作 を3
分 類
し,
各動 作
とも速 度 条 件
を1
) 可能
な 限 り速 く,
2
)普 通
の2
条 件
と した。 可能
な 限 り速 く
側方
重心 移 動
し た場 合
,
各動 作 と も初 期
に 圧中
心 は一.
日.
左
側へ 移動
し,
その後 急 速
に移 動 方 向
であ
る右 側
へ移 動
した。
普 通の速度
という指 示
で側 方 重 心 移 動
し
た場 合 は約 半 数
でこ の よう
な機構
が み ら れな くな
っ た。 こ の こと よ り側 方 重 心 移動 動 作
に おけ
る動 き始
め に は各 動 作
に共
通す
る機 構
が存
在 す ること,
ま た その機 構
が速 度 依 存 性
に機 能
す るこ と が示 唆
さ れ た。 ま た,制動
に関
して は移 動側
の大殿 筋 活 動
お よ び 反対
側の脊
柱 起
立筋 活 動
が 重要
であ
っ た。脊柱 起 立 筋
は高位
に よ る活動
の違
いが み ら れ,特
に 下部腰 椎 部
は初 期
の骨 盤 運 動
にも深 く
関与
してい る と考
え られた。 キー
ワー
ド側
方
重心 移 動
,
脊 柱 起
立筋 活 動
,
圧中心
は じ め に端 座 位
での側 方 重心 移 動
動作
は 日常 生活
におい て頻 繁
に用
い ら れ る動 作
で あ る。
し た がっ て,
座位
バ ラ ン ス訓
練
に おけ
る重 要
な 課 題の一
つ と し て我
々 が治療 す
る場 面
も多
い。ま
た,
運 動 発 達 学 的視 点
か ら立位
バ ランス との関
連 を想 定
し,
頻 繁
に運動
プ ログラムに 取 り入 れ ら れて い るD2 )。
その意 味
で我
々理 学 療 法 士
が運 動 発 達 学 的
ア プロー
チ を お こな う
た めには座 位
,
膝 立 ち位
,
立 位 な ど
の発 達 段 階に し た がっ て階層 的
に組
み立て られている 制御 機 構 を 明 らか
にす
る必 要 性
があ
る。ま
た,
理 学 療 法
にお
いて側 方 重 心 移 動 動 作
を おこな わ せ る場
合には日常
生活 場 面
で の 目的 動 作 も想 定
してい る こ とが 多
い。体 幹
の動 き
か ら,
1
) 側 方
の床
ヒに あ る物
を拾 う
,
2
) 臀 部
をず
らす
,
3
) 側 方
で肩
の高
さく
らい に あ る よ う な物
を とるという
3
種 類
に分 類 す
る こ とが 可 能であ る。
この 際,各 動 作
の最 終 的
な姿 勢
は異 な
るが,
側 方 重 心 移 動 と
いう共
通の課 題 も存
在 す
る。
このよう
に,
理 学 療 法
に おい て側 方 重 心
移動 動
作 を考
える場 合
に は,
*Postural CQntrol and
Activity
of
Erector
Supinae
MuscLes
during Laterul Shift of Center of Gravity in Sitting
1 )東 北 文化 学 園 大学 医療 福祉 学部 リハ ビ リ テ
ー
ション学 科 理学 療 法 学専 攻〔〒981
−
8550宮 城 県 仙 台 市青 葉 区 国 見6丁 目45番16号)Hiroyuki Fujisawa
,
RPT,
PhD.
Fumihiko H(,shi,
RPT,
MS,
RyokoTakeda
.
RPT,
MS :Departmem of Rehabilitation,
Faculty ofMedical Science& Welfare
.
Tohoku Bunka Gakuen University〔受付 日 2000年8月2日/受理 凵 2001 年 6 月 26 日〕 い
く
つ か の動 作
を 設定
し, その共通 性
と相 違 を検 討 す
る必要 性
があ
る。
富
田 ら3}は 脳 卒 中 片 麻 痺 患 者の側方
重 心移 動 動 作
に つ い て検 討
し,片麻 痺
患者
では健 側
へ の体 幹 側 屈
に対
し て,
制 動
に働 く
べ き患
側の脊柱
起 立筋 活 動
が不 十分
であ
る ことを指 摘
している。
このよ う に,
体 幹
運動
に関
して脊
柱 起 立筋
が安 定 筋 ま
た は動 筋
とし て も重要
であ るこ と が 明 らか に さ れてき
て い る。しか し
,
脊 柱 起
立筋
はい く つも
の筋
が層
をな
し機 能 単 位 と
し て働
いてい るこ と や,
各
脊 椎 関節
の動
きに対 応
した機 能
があ
る こ とを考
慮
す
る と,
特 定
の部 位
だけ
で代 表 さ
せ ること
は 必ず
しも適 当
で は ない。ま
た,
端 座 位
に お け る 側 方 重 心 移 動 動 作で は制
動に関 する文献
は散 見
さ れ るも
の の,動
き 始 めの制 御
に関
して は十分
に運 動 学 的 検 討
が おこな わ れ てい ない のが 現 状である。
こ の よ う な 中
,
立 位に関
して は動 き始
め か ら制
動 まで多 様
な検
討 が な さ れてい る。
Oddsson
ら4−
8〕は立位
にお け
る体 幹 運 動 と筋 活 動
の関係
を一
一
連の研 究 成 果
とし てま
とめ,
側方 重
心 移 動の一
つ であ る 側屈
運動 時
の筋 活 動
に関 し
ても検 討
し ている。
その結果
,右 方
へ の速
い側 屈
運 動
にお
い て体 幹 運 動
に先 行
し た 右脊柱
起 立筋
お よ び右
外腹 斜 筋
の筋 活 動
を,
制 動 に 関 しては 左 脊 柱 起 立筋
お よ び左 外 腹 斜 筋 活動 を 認
め てい る。
ま た, 立位
に おけ
る動
き始
めの制御
に関 し
て は,
重心
お よ び 圧 中 心 か ら み た 運動力
学 的 な研
究 も 進め られ て おり
,
Mille
ら9} は 片 脚 あ げ 動 作 につ い て圧中
心の軌 跡
か ら姿 勢 制 御
の評価 を 試
みてい る
。
そこで今 回,
端 座 位 側 方 重 心 移 動 動 作 を上記の よ う に3
分
類 し,
1
〕端 座 位 側 方 重 心 移 重力動 作
の動 き始
め にお け る姿
勢 お よ び 圧中 心 変 化
と筋 活 動
の関 係
,
2
)制 動
に 関 す る 各 筋 活 動の役 割,
3
)脊 柱 起
立筋
に おける各 部 位
の役
割 を 明 ら か に す る 目 的で研 究 を
おこな
っ た。方 法
1
.
対 象
対
象
は健 常 成 人 男 性
10
名
(年 齢
22
±1
歳
,
身
長 172.
5 ±4
、
7cm,
体
電63
.
3
±6
.
lkg
) と し たU 2.
1
則定 方法
端
座位
に おける側方
重 心 移 動 動 作 時の左 右 脊柱 起 立 筋
活 動
〔下部 腰 椎 部
,.
L
部腰 椎 部
,
下 部 胸 椎 部
) お よ び 左右 大殿 筋
の表 面 筋
電図
(TELEMG
,
BTS
) を 双 極誘導
によっ て
,
ま た 圧中
心 点 〔cerUer of pressure,
COP
) を 床
反 ノ
」計
(9287
.
Kistler
),
体
幹ア ラ イメ ン ト(頭 ]頂
・
ノ,1
右 肩 峰
・
第
7
頚椎
棘 突 起・
第12
胸 推 練突 起
・
左 右
ヒ後
腸 骨 稜
・
ノ,1
右 卜前 腸 骨 棘) を3
次
元動 作 解 析 装 置
〔ELITEplus
,
BTS
) にて そ れ ぞれ測定
し た。
筋 電 計
お よ び 床 反 力 計の サン プ リン グ周 波 数
はleoeHz
,
3
次 元
動作 解 析 装 置
で は 5011z に てA
,
・
’
D
変 換
し,
デー
タを同
期 させ パー
ソナルコ ンピュー
タへ取 り込
んだ。
側 方へ の重 心 移
動 動 作
は,
D
移 動 方
liiJ
へ の体 幹
i
興II屈
qateral
bending,
LB
),
2
〕移 動
ノ∫向
と 逆方
lfiJ
へ の体 幹
側
屈
(reverse
lateral
bending
,
RLB
),
3
)混 合型
〔
:
combinedlateral
bendirig
,
CLB
)の3
種 類
と し た 〔図D 。
加 え
て,
速 度 条 件
を停 通
(normal ) お よ び 可 能 な 限 り速 く
(fast
)の2
種
類 とし,
各
被 験 者につ い て6
試行
おこな
っ た。ま
た,
被 験 者
に対
す る動 作
の 説 明は,
Ll3
で は 「真 横
の床
に落
ちて い る もの を 拾う
よう
に1
,
RLB
では 「臀 部
を ず ら す と きの よ う に、
,
CLB
で は 「真横
で肩
の高 さ
にあ る2m
く
らい 先の もの を と るよ う に」
(
1
)
Lateral
bending
(
2
)
Reverse
lateral
bending
(
LB
)
(
RLB
)
〈卜一一一一一
一
一
一
一
一
s]lift ←一
一
一
一
一
一
一
shin Trurlktilt / / N PeMctilt(
3
)
Combinedlateral
bending
(
CLB
)
:(
1)
→(
2)
図1端座位に お け る 側方 弔心移 動 動 作の分 類 と し た
。
座位 姿 勢
は 膝・
股 関 節90
度
屈曲 位
,
腰 椎 軽 度
前彎
と し,
足 部 外 側 は 臀 部幅
と.
.
・
致
させ,
両
上肢
を胸
で繃
ま せ た/
t こ の際,動 作 中に臀1
ll
は浮
いても構
わ ない が,
足 底 は 接 地 し て お く よう
に加 え
て指 示 し
た。足底 接
地 を 条 件 と し た 理由
は,
制 動
に おけ
る芝持 機 構
と して のド肢
の役 割
を検
討 する た め で,
離床
し た場 合
に生じ る カ ウン ター
バ ランスなど
の影 響 を 除外 す
る こ とにあ
っ た。
測
定
f
順 を以
下に示
す。
1
)皮 膚
を前
処置
し たのち 電 極 (PS−00−
S
,
Medco
匸esし〕を筋線 維
に沿
っ て3cm
間 隔 で 貼 り付
け,
最 大 随 意 収 縮
〔MVC
) におけ
る筋 活 動
をDanie
]らの徒 手筋 力 検
査法
に準
じて測 定
。
2
)赤 外
線 反射
.
マー
カー
を貼 り付
け.
被
験者
を床
反 ノ丿計の ヒに設 置 し た椅
子へ座
ら せた。3
)合 図
G
’
i.
と 光 )に よっ て動 作 毎 に普 通 (
norrnaD,
卩亅能
な 限 り速 く 〔fast
>の2
種
類の条件
で右 方 向
へ.
霞心 移 動
をお こな わ せ た。
3
.
解 析 方法
f
備 実
験 よ り,
COP
と 運 動 開 始の合 図 を 基 準 に 側 方重心 移 動 動 作
をCOP
の経 時
的 変化
か ら 以 ドの5
つ に 相分 類
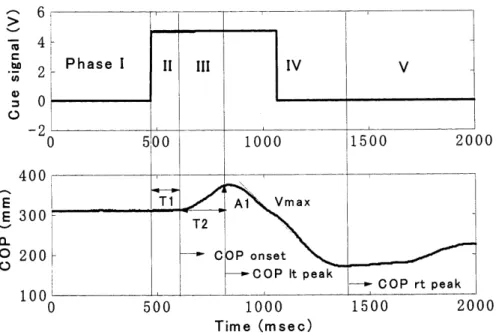
し た 〔図
2
),
,
す な わ ち,
Phase
I
:合 図 以前
の安
静 座位
二冫1
犬態,
Phase
H
:含 図 か ら 移 動 開 始 (COP
onsel.
)までの
問
,
Phase
皿 :COP
onset か ら 第1 ピー
ク 〔左 ノ
∫ 最 大 変 位,Left
peak ) ま での 間,
Phase
W
:COP
ieft
peak
か ら 第2
ピー
ク(右 方 最 大 変 位
,
rightpeak
)
までの
問
,
Phase
V
:C
⊂)P
right peak から動作 完
r
までの 閾 で あ る
。
ま た,COP
変 動
の指 標
と して含 図
からCOP
ollser までの反 応 時 間 (Tl
),
COP
onset か らCOP
left
peak までの時
間 (T2
〕 お よび振 幅 (
Al
),
さ らにCOP
left
peak か らCOP
rightpeak
にお け
る最 大移 動
速 度 (
Vln、
、
x) を 求め た (図2L
C
⊂)P
onset は合 図 前
のCOP
平均 値
か ら5mm
左方
へ 変動
し た時
点 と し た。
筋 電 図
は,
はじ
め に20Hz
の ハ イパ ス フ ィル タ を か け,
次
に平 均 値
を減 算
,
孟こ波
整 流 し たの ち,
各Phase
の積 分筋 電 値
(1
秒 値
〉 を計 算
し た.
同様
の 処 理 をMVC
に おけ
る筋
竃波 形
につ い て も おこない,
その積
分 筋 電 値 に て動 作 中
の積 分 値
を標 準
化 し,
1イ分 率で表
わ し た/
t3
動 作 を 運 動 学 的に分 類 す る ため に,
左 右 肩 峰 を 結 んだ直線
と水 平
線 が 成 す 角 度 (Trunk
tilt
,
図1
),1
左
右
ヒ前 腸 骨
棘 を 結 ん だ直線
と水
’
ド線
が成 す 角 度 (
PeMc
tiit,
図D ,
13
:右 肩1峰 部σ)移 動 距 離 を 求め たu また,
骨
盤の動
き を 明 ら か に す る た め,
右
上前腸 骨 棘
の左 右 方 向
へ の動 き に着
冂 し た.
こ の際
,
マー
カー
が左 右
へ動
いた と判定
する基 準
は,
合
図前 静
止位 置
の平 均 値
か ら2mm
変 位
し た場 合 と
し,
左 方
へ動
い た場 合
に限
り最
大変 位
量を求
め た。4
,
糸
充
,S
†
各 筋
に お け るPhase
毎
の比較
お よびCOP
変 動 指 標
に270 理 学療 法学 第
28
巻 第6
号(
〉)
一
爬 藍 脚 ω o = O61
一
IIi蹴
1420
.
一2
.
−一
一一
、
1
.
1「
IPhaseI
「1
HIII
−一
齟
一
…
IV
『
一1−一
一
「 iV
]
E1
−一
一
…0
500
i
一1「
1000
_
−1500
20
14001
(
I
E
IE300
−
u82001
1006
Tl
__ 、
」一
L.
.
_
一
こ、
_
500
睡
詰
一丁
…
c
門
onset GOP It peak1000
Time
(
msec)
一一
’COP
rt peak1500
2000
図2
運動開始 合 図とCOP
によ るPhase 分 類お よ びCOP 変 動 指 標.
COP onset :動 き始め,
COP
lt peak :最 大 左 方 変 位 点,
COP rt peak :最 大 右 方 変 位 点,
Tl ;合 図か らCOP
onset までに要し た時 間
,
T2 :COP onset か らCOP
lt peak までに要 する時 間.
60
−一
.
.
一
.
一
一
一
50
1
… 岫解
72韭51 ひり
.
畠
10
・
’
oi
.
・
,
匿
.
.
・
..
尸
r「
.
一
一
1
;
:
L
9
・k
?
・一 一i
一
10
一
脇
尋
幺
丿
「L
_
_
_ 一
_
−
0
0
2040
60
tr咀 腑k til重〔dtgrce〕旨
皇
nc.
_
217 ±46_
需
図
3
各 動 作 条 件fast
に お けるTrunk
tilt とPelvic
tiltの相 関 図 (典 型 例 ) お よ び 右 肩 峰 部の移 動 距 離distance
(平 均値± 標 準 偏 差
,
n=
10
).
LB:且ateralbending
,
RLB
:reverse
lateral
bending
,
CLB
:combinedlateral
bend
−
ing
.
関 す る各 動 作
の比較
につ い て はFriedman
検 定 を
,
COP
変 動 指 標 間
の相 関
につ い て はPearson
の相 関係 数
を用
い た。
ま た,
統 計 的 有 意水 準
は危 険 率
5
%
と した,結 果
COP
変 動と合 図 を 用い たPhase
分 類
は,
各 動 作
とも
条 件
fast
です
べて可 能 だ
った
が,
条 件
normal で は分 類
が困 難 な も
のが半 数
ほ どあ
っ た。そ
のた め,
定
量的
な解
析
は条 件
fast
に関
して の み行
っ た。
は じ めに
,
条件
fast
に おけ
る結 果
か ら 示 す。
図3
に3 動作
に お け るTrunk
tilt
と
Pelvic
tilt
の相 関 図
の典 型 的
な
・
一
一
例 を示 す
。
動 作
LB
で はPelvic
tiltがあ ま り変 化
せず
,Trunk
tiltの み が大 き く増 加
し た。
動 作
RLB
お よび
CLB
で は 運動
開 始直後
に はTrunk
tilt
と
Pelvic
tilt
が同時
に 生 じ,
その後
Pelvic
tilt
の方
が 大 き く増加
す る 傾向
を 示 し た。
右
肩峰
移動
距 離 に 関 しては動 作
CLB ,
LB ,
RLB
の順 に 短 く な る 傾向
を 示 し た が 有 意 な差
で は な か っ た。
次
に,
動 作
にと も
なう
COP
変 動 と各 身 体
マー
カー
の動
き を 示す (
図4
)
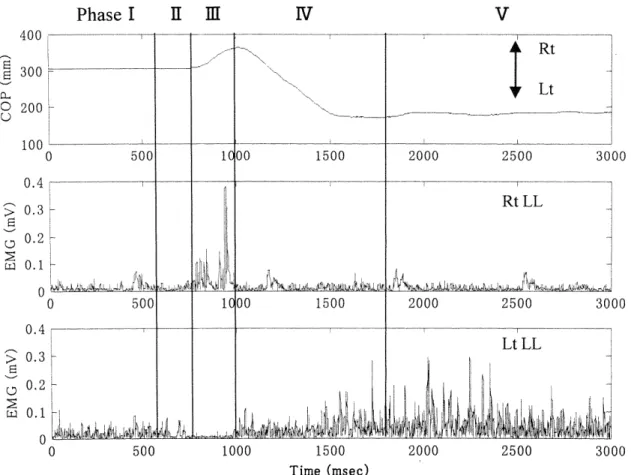
。各 動 作
とも身 体
マー
カー
はPhase
皿 で動 き始
めた。右
上前 腸 骨 棘
にお け
る左 右 方 向
の軌 跡
はCOP
の変 化 か
ら や や遅
れて相 似 し
た変 化
を示
し た。右
上前 腸 骨 棘
の左 方 向
へ の最 大 変 位
量 は,
動 作
CLB
で6.
1
±2.
7mm
(
10
例 中
10
例 )
,動 作
LB
では
7.
0
±4.
O
mm(
10
例 中
8
例 )
,
動 作
RLB
で は6.
2
±4
.
5
mm(
10
例
中8
例)
であ
っ た。肩 峰
は始
め か ら移 動 方 向
へ と動
いた。動 作
LB
に おけ
る筋 活 動
は,
左 脊柱 起 立 筋
の各 部位
でPhase
ll
か ら
皿にか け
て大 き く低 下
し た(
表
1
)
。右 脊
柱 起
立筋
はPhase
H
で は変 化
なく
Phase
皿 で大 きく増 加
し
た。ま
た,
右 大 殿 筋 活 動
がPhase
W
お よ びV
で増
加 し た。
動 作
RLB
で は,左
脊
柱起
立筋
の各
部 位
で動 作
LB
と 同様
にPhase
H
か ら皿に か けて大 き く低
下 し た が,
Phase
皿の中 期
か ら再
び活 動
が増
加
し た(
表
1
)
。
ま た,左 大 殿 筋 活 動 が
Phase
皿お
よ びIV
で大 き く増 加
し た。
動
作
CLB
では動
作LB
とほぼ 同 様の活
動 を 示 し た(
表
1
>
。
各 動 作
に おけ
るCOP
変 動 指 標
を 比較
す
る と,各
指 標
と も有
意 な 差 は な かっ た。一
方
,A1
と
Vm 。
xと
の間 に は有 意 な相 関 (
r=0,
628,
p
<0.
01
) が
み られ
た。各 動 作
にお けるA1
は,
動 作
CLB
で54
.
3
±145
mm,
動作
LB
で は40
.
2
士19
,
3mm
,動 作
RLB
で は46
.
0
± 11.
O
mm で あっ た。
条 件 normal で は
,
COP
変 動 に おいて初 期
の 反対
側へ400
鴛
3
・・KO200Q100
160
簷
i4
・鱠
120
霎
り100
畄80
Phase
I
E
皿
V
100
套
。L
彗
2
−
100
:
N−
200
0
500
1000
1500
2000
2500
3000
Tine
(
msec)
図4
速い側 方重 心 移 動動 作 (CLB
) にともな うCOP ,
右上前腸 骨 辣 およ び右 肩 峰 部の変 動の典 型 例ズ
「
」
/丶
\Rt
Lt
−‘
0
50
1000
10
2000
2500
300
Rt
Lt
0
50
1
°1
°10
2000 2500300
」
ー
ー
\Rt
]
Lt
表1
各Phase
にお けるPhase
I
か らの積 分 筋 電 値の変 化 量 (% ) LBRLB
測 定 筋 群 Phase lIPhase lIIPhase lVPhase VPhase HPhase HIPhase lVPhase V
左 下 部腰 椎
一
〇,
7
±L2
一
〇,
7
士1
.
65
,
0
圭3
.
66
.
1
±2
.
7
’
一
1
.
2
±1
,
82
,
7
土4
,
218
,
7
土5
,
510
.
9
±8
,
9
’
左上部腰 椎一
1
.
3
±1
.
9
一
3
.
2
士2
.
32
,
2
±5
.
03
.
1
±4
.
5
’
一
2
.
2
±2
,
429
±5
.
313
,
8
±8
,
310
.
9
±7
,
6
‘
左下部胸椎 部
一
1
.
8
±1
.
1
一
3
,
5
±2
.
50
,
8
土4
.
41
.
9
±5
.
3
鱒
一
1
.
5
±L81
.
4±3
.
58
,
6
±6
.
37
,
0
±4,
0
‘
左大 殿筋0
.
0
±0
.
51
.
8
±1
.
91
,
6
士1
.
72
.
7
±2
.
0
榊
0
.
1
±0
.
66
,
7
±10
,
07
.
0
±7
,
92
.
6
士2
.
3
脚
右下部
腰椎
0
.
3
±0
.
649
±3
.
72
,
4
士3
.
12
.
0
±3
.
3
申
一
〇.
1±1.
01
.
0
±0
.
91
.
3
士0
.
80
,
5
±0
.
9
’
右 上 部 腰椎0
,
5
±1
.
672
±4
.
33
.
7
士5
.
73
.
1
圭6
.
r
一
〇.
6
±2
.
61
.
3
±2
ユ2
.
0
±3
.
00
.
3
士2
.
ON
.
S
右下部 胸椎 部一
〇2
±1
.
33
,
6
土3
.
30
,
8
±4.
41,
4士6
,
4章
’
一
〇,
7
±1.
70.
6± 1.
90.
5±2.
6一
2、
1±2.
r 右 大 殿 筋一
〇.
2
±0
.
70
.
7
土1
.
33
ユ土1
.
95
,
3
土4
.
0
嘔
一
〇.
2
±0
,
52
,
4±3
,
87
.
1±6
,
94
.
7
±4
.
9
’
CLB
測定筋
群Phase
HPhase
皿Phase
IVPhase
V
左下
部
腰椎
一
〇.
8
±091
.
6
±2
.
311
.
4
士6
.
78
,
7
土3
,
8
’
左上 部 腰椎一
2
ユ±171
、
3
±3
.
112
,
2
士9
.
310
.
6
±49
零
左下部胸椎部
一
2
」±1
.
40
.
3
±2
.
278
士7
.
77
.
3
±4
,
6
’
左 大 殿筋
0
.
2
±1
,
08
.
1
±16.
55,
1
±〔L42
.
1±1
,
4
”
右 下 部 腰 椎一
〇ユ±0
,
51
.
1
±0
.
80
.
2
±0
.
80
.
1
±128
右 上 部 腰椎
一
〇.
5
±1
,
81
.
4
±1
.
60
,
4
土1
.
8
一
〇ユ±2
,
0NS
右下 部 胸椎部一
〇.
6
±1
,
60
.
4
士1
.
12
,
3
±22
一
2
.
7
±2
.
2
’
右
大 殿筋
0
.
2
士0
.
92
ユ士2
.
8
一
3
.
8
士2
.
45
.
6
±6
.
4
覇
’
p<0,
01,鱒
p<O.
05.
N
.
S
:有 意 差な し の揺
れ が大 き く減 少
し,
立 ち 上 がり
の判 別
が困 難
と なるも
のが 多 か
っ た。各 身 体
マー
カー
の変 動
は,
COP
の初
期
に おけ
る反 対 側
へ の揺
れ が大 き く減 少
し た場 合
に は,肩 峰
お よ び 上前
腸 骨 棘
の両 部 位
とも
に,
は じ め か ら移
動
方 向
へ動
い た(
図
5
)
。
脊柱
起 立筋 活 動
に関
しては,
定
量 的 な比 較
が出来 な
いも
の の,
条件
fast
と比 較
して動 き
始
め や制 動
に関す
る積 極 的
な筋 活 動
が少
な かっ た。
272 理 学療 法 学 第28巻 第
6
号350
曾 300sPt
2500灘
L
_
〜」
0
1000
2000
3000
4000
5000
6000
180
窟
ε
160
翆
1
窪゜&
12
叶
1000
1000
R001
0
001
一
002
}
(
日 日)
」 Φ2
コ 。萄
卍
2000
3000
4000
5000
6000
0
1000
20003000
4000
5000
6000
Time
〔msec)
図5
条 件normal での側 方 重心移 動動 作 (
CLB
) に と も な うCOP
,
右 上 前 腸 骨 棘 お よ び 右肩 峰 部の変動の典型例考 察
1.
動 き始
め に お け る姿 勢 制 御
各動 作 と も速
い側 方 重 心 移 動
に おい て,COP
は一
旦 移動
方向
と は 逆へ変 化
し,
その後 移 動 方
向
へ と急 速
に移
っ た。
この 時,身
体
各
部
は 異 なっ た動
き を示
し た。
す
なわ ち
,
右 上 前 腸 骨 蕀
はCOP
と 同様
に一
旦 逆方 向
へ 数 mm動
いた後
に 移動 方
向
へ と急 速 に動
き,
右 肩 峰
は そのま ま移 動 方 向
へと動
いたので あ る。
こ の こ と は, 初 期の数
cm におよ ぶCOP
変 化
がわ ず
か な骨 盤
の左
上方
へ の 動 きに よっ て も た ら され てい る こと,
さ ら に は動 き始
め の メカニ ズムが 各 動作
で共 通 し
ていること を示 唆
し てい る。
運動 力 学 的
には重 心
の水 平 面
へ の投 影 点
とCOP
の 差 がモー
メ ン トアー
ム と して定 義
さ れ る が 10),
こ こ で は初 期
の骨 盤 運 動 が 数
mmと重 心 位 置
が ほと
んど変 化
してい ないの に対
して,
COP
変 化 量
Al
は数
cm と かな
り
大 きい こと が わ かる。す な
わち
,
こ の初 期
のCOP
変
化
が大 きな
モー
メ ント
アー
ムを
つく り出 し
,
あ た
かも傾
い た 棒 が 倒 れ る が ご とく
側方
へ のす
ばやい移 動
を可 能
に してい る。
これ は,
運 動 初 期 に お け るCOP
変 化 量A1
が,
重 心移 動 速 度
の一
つ の指 標
と なるCOP
最
大移 動 速
度
Vm
。. と相 関 し
ている こ と から も理 解
でき
る。こ の初
期
の骨
盤運 動
に関 与 す
る筋 活 動
を動 作
LB
で検
討
してみ る と,
右 脊 柱 起
立筋
(
下 部 腰 椎 部 )
の活 動
がPhase
ll
か らPhase
皿 にか け
て大 き く増 加
しおり (
ユ0
例
中6
例)
,
こ の部 位
が動 筋
の一
つ とし て役 割
を担
っ てい る叮能性
が高
い。
ただし,
他
の被 験 者
や動 作
で は筋 活 動
の大 き
な増 加
が み ら れな
い ことか ら
,
右 脊柱 起 立筋
(
下部腰 椎 部 )
だけ
では初 期
の骨 盤 運動
を説 明
でき な
い 。お
そ らく
は,
外
腹斜 筋
な どの側 腹 筋 群
が 重要 な役 割 を果
たし
てい る と推 測 され
,
今 後
こ の点
につ いて は時 間 的活 動
順 序
の問題 も含
め,
さ
らな
る検 討 が必 要
と思
われ
る。ま
た,
Phase
ll
か らPhase
皿 に かけ
て相 反 抑 制
と思
わ れる左 脊柱 起
立筋
の活 動 低 ド (
silentperiod
)
が み ら れ,
左
右 脊柱
起 立筋
の協 調 性 も初 期
の骨 盤 運 動
に とっ ては重 要
であ るこ と が 伺 え る。
動 作
CLB
やRLB
で は, 初 期のCOP
変 化 に同
期 し た右 脊柱 起 立 筋
の活 動
を示 す 例 が 少 な くな り,前
述 し た よう
に外 腹 斜 筋 な ど
の側 腹 筋 群
が本 動 作
では さ ら に重
要 な役 割 を
果た し てい るも
の と思 わ れ た。
一
方
, 上 記の よう
な 初 期COP
の変化
を伴
わ ない側方
重 心 移 動 動 作
で は,
各 動 作
とも右 骨 盤
の挙
上 お よ び左 脊
柱 起
立筋
の silentperiod
が み ら れ なく
な り, わず
か な筋
活 動
バ ラン スの変 化
が体 幹
上 部の運動
を 引 き起
こ す もの と推 測 さ
れる。 この ことは,
側 方重 心 移 動 動 作
に おけ
る 制 御 機 構 が 速 度 依存
性である こと を示
してお り非常
に興
味
深い。
脳 卒 中 片 麻痺
患 者 な ど で 速い側方
重 心 移動
が 出来
ない場 合
,
この よう
な機
構
の欠 如 が 原 因 と し て あ げ ら れるか も し れ ない。
2.
制 動
に 関す
る各 筋 活 動
の役
割各 動 作
とも右
大 殿筋
活 動 はPhase
lV ・V
で 増 加 し て お400
窟
8300
F 儀0200
−
QlGo
L
0・
41
30
.
3
−
8
0
o
.
2 !
Σ 鰄0
.
1
一
0
.
43G
.
3
−
9
0
.
2rotUO
,
1 −1
Phase
IH
皿
V
0
0
500
1000
1500
2000
2500
3000
Time
(
msec)
図
6
動作
LB
に お け るCOP
変動
と左 右下部
腰椎
部脊
柱 起 立筋 (Lower
lu皿bar
part of elector spinae ;LL) 活 動一
一
一
内
「
、
了「
一
一
一
.
「
、
一
油
岸
、
「
一广
.
「
ド
//ゴ
.
一
q
q
一 \、
、
1
.
.
.
一
一
.
一
滅
.
「
に.
[
一
酌
.
『
\
\
.
、
、
丶
ヒ
、
、
\丶
丶
\
、、
、
.
.
、
广
齟
一
一
一
Lt
IL_.
.
一
广
.
一.
L−.
一
.
1曜
,
.
广
一一一
_
.
内
尸
r卍
.
.
1−一一一
一
一一
.
’
一
肋
5
−__
⊥_一.
一
一
一.
一一
一
1
−
」0
500
一.
一一
广
「
.−iL
1
一
一.
曲
「
「
「
内
闇
w7−「
.
−
00
15GO
广
」
一げ
.
.
一
内
2000
25GO
30
「…
甲
冖
ト
ー
爐
柵 ノ1、
鳳
。・
撫 扁1
蜘
I
l
[
唱
1縣
触
、
Il 、
梯油
P
綜 Tガ
「
「
一
.
一
一
.
.
一
一
一
.
一一
Rt
LL
.
1
→
乖
鹽
、_癌
簸
範 舳 幽 _ 、蟹0
500
−.
.
一
内
一
内
100
1500
2000
250
〔}3G
「
「
一
「
協
戸臨
1
麺
11
蜥
瞞
圃
幅
,i
TLt
LL
−
I
l
魎
臨
幽
…
輪
1幽
り, これ らの活動
が制
動
の た め に働
いているも
のと推 測
さ れ る。
ま た,左 脊 柱 起 立 筋
につ い ても各 動作
に おい てPhase
IV・V
で活 動 量
の増 加 が
みられ
,
これ ら
の活 動 が
制 動
に 関 わっ て いるも
の と思
わ れ る。 ただ し動 作
RLB
お よび
CLB
で は左 脊 柱 起 立 筋
は求 心 性 収 縮
,
動 作
LB
では遠 心 性 収 縮
とな
っ てい る。動 作
LB
で は筋 粘 弾性
を最
大 限利
用 し た 制動 様
式 を とっ てい る た めに他の動 作 と 比較
して増 加
量 が小
さく
,動 作
RLB
お よ びCLB
で は最
後
に骨
盤 を挙
上 しな が ら制 動
してい る た め に筋活動
量
が大
きく
なっ ている と考
え ら れ た。
動
き始
め に は各 動 作
に共 通 な 機構 が
み られ
るのに対
して,
制 動
で は各 動 作
に特
有
な もの と な る こ と は 臨床
上 重 要 な 知 見 と思 わ れ る。
3
.
脊 柱 起
立筋
に おけ
る各
部 位
の役 割
特 徴
的 な筋
活 動 と し て,
動作
LB
に お け る 下 部 腰椎
部 の筋 活 動 が あ げ ら れ る(
図6
)。
この筋 活 動
は骨 盤 挙
上 と体 幹 側 屈
に作 用
してい る と推 測
され る。 こ こ で,
上部
腰 椎 部
や下 部 胸椎 部
にはこ の よう な活 動
が み られな
い こ とが下部腰 椎 部
の側 方 重 心 移 動
におけ
る大 きな役 割
を示
し
ている。ま
た,
動 作
RLB
お
よ びCLB
では右
上部 腰 椎 部 が 動 作
中
に有 意
な筋 活 動
量の変 化
を示
さ な かっ た。
こ の こと は,
個 入 差の大 きい こと が 要 因 と思 わ れ る が,
この部
位 は 腰椎 軽 度 前 彎 保 持
のため にPhase
I
か ら筋 活 動
がみ ら れる こと
から
,
基 本 的 な姿 勢 を維 持 す
るた めに機 能 し
ている と思
われ
た。 以 上の よう
に各 動 作
に おいて共 通
の役 割
とそ
れぞ
れ の高 位
に よ る役 割
が筋 活 動
に反
映 さ れて い る も の と推 測 さ
れ た。な お
,
本 論 文の 要 旨 は 第35
回 日 本 理 学 療 法 士 学 会 で報 告
した。
引 用 文 献
1
)奈良 勲
,
濱
出茂治
・
他:Pelvic
Board
に よ る片
麻痺
患者
の骨 盤 運 動 に 関 す る 研 究 理 学 療 法 学13
(1
):11
−
15
,
1986
.
2
)
中村 隆一
(編 著 ):中枢 神 経 疾 患の理 学 療 法 医 歯 薬 出 版.
198L3
)冨 田昌
夫,
佐
藤房郎
・
他 :片
麻痺
の体
幹 機 能,
理学
療法
ジ ャー
ナル.
25
(2
):88
−
94
,
1991
.
4
)Thorstensson
A
,
Oddsson
L,
etα1
.
:Motor control of vol−
untary trunk movements
in
standing,
Acts
Physiol
Scand
l25:309
−
321,
1985.
5
)Oddsson
L,
Thorstensson
A
:Fast
voluntaryfiexion
movementsin
standinge Primary movements and ass(トciated
postural adjustments
.
Acts
Physiol
Scand
l28:
341
−
349.
1986.
6)
Oddsson
L,
ThorstenssQnA
:Fast voluntary trunkflex
−
ion
movementsin
stand 正ng :motor patterns.
Acts
Physiol
Scand
129:93−
106,
1987.
7
>
Oddsson
L
:Co
−
ordinatiQn of a simple voluntary multi−
27,1
ps,)'Tfiit?
sion
in
slai]ding man. ActsPhysiol
Scand
134/]09-1]8, 19SS,8)Oddsson
L,Thorstensson A/Task specificityin
thetroi of
ir]trinsic
trunk muscLesin
inan. Acts PhysiolSc/and
139/]23-13L. 1990.9)
)v'Iille
)v(I.,
}L・louchnino
L/ ,nLrehuinnn
anticipalorypos-ac28kar6e
turaiadjustrnents affc/c{ecl
bv
a niodifiuation of thutialposizionol thvcenter of grnvily.
Neurosci
1.ett
242/ 61-{5.1..1998.
]O)
Chang
II,
Krebs
DE/ Dvnamic balar]cucon[rolin
elders/GE{itimitiationassessmenl as a screening k)el,
Arch
I'hvs
Med
Rehabii
80/490-・49,1,]999.<Abstractl'
Postural
Control
andAetivity
ofErector
Supinae
Muscles
during
Lateral
Shift
ofCenter
ofGravity
in
Sitting
Hiroyuki
FUJISAW'A,
RPT,
PhD,
Funiihiko
HOSIII,
RPT,
MS,
Ryoko
TAKEDA,
RI'T,
MS
Department
of'Rehabilitation,Riculty
ofMbdieal
Science
&
IVelfare,
Tohoku
Bunha
Gakuen
University,
Sendai,
Miyagi,
Japan
Postural
controlduring
altiterat
shift of center of grax,ity(COG)
in
sitting was studiedfor
tenhealrhy
subjects(age
22
± 1 years,height
172.5
±4.7e]n,
weight63,3
±6.1
kg),
The
electromyography
(EMG),
trunk alignment and center ofpressure
(COP)
during
thelateral
shirt ofCOG
in
sitting were measured,The
EMG
signals(TELEMG,
BTS)
were recordedbilalerally
from
four
parts:{1)
lower
lumbar
part
(LL),
(2}
upperlumbar
part{UL),
(IS)
]ower
thoracic
part{LT),
and(4)
gtuteus maximus(GM).
Bipolar
surface eleclrodes were placed overthe
museiebeilv,
The
date
were sampled at
1000
Hz,
andkinetic
date
were recorded using aforce
pLate
(9287,
Kistler)
at1000
Hz
of samplingfrequency.
Kinematics
were recorded synchronously withthe
ether signals using afour
camera system(ELJTE,
BTS),
and thedate
were then sampled at50
Hz.
The
lateral
shiftin
sitting was classifiedinto
three movements;(1)
IateraL
bending
of trunk(LB),
(2>
reverselateraL
bending
of trunk{RLB),
and(3)
combinedlateral
bending
(CLB}.
The
lateral
shift movements wereseparated