ケーヒン技報 Vol.2 (2013)
正面衝突における構造音響データの応答特性
※Response Characteristics of Acoustic Emission Data in Frontal Crashes
Recently, the frontal crash sensing is generally based on a accelerometer in the ECU and a few accelerometers in front of the vehicle. In this system, it is important to distinguish between the offset frontal crash assessed by vehicle tests on the European New Car Assessment Programme and the Allianz Zentrum für Technik. In this study, the spectrum analysis is performed for signals measured by an acoustic emission (AE) sensor on the ECU, and the characteristics of spectra is reported concerning frontal crash tests and rough road test. In addition, in order to judge whether airbag must be deployed, a means to distinguish the frontal crash type using only an AE sensor and a conventional accelerometer is considered.
Key Words: safety, frontal collision, airbag control Acoustic Emission, frontal offset crash
1.はじめに
乗用車へのエアバック搭載が拡大している 近年,車両の前面衝突は一般に加速度センサ を用いて検出され,主センサが SRS 用 ECU 内に,幾つかの補助センサが車両前方に設置 される(1)-(3).このようなシステムでは,Euro NCAP で評価されるオフセット前面衝突と, アリアンツ技術センタ(Allianz Zentrum für Technik,以下 AZT)で評価されるオフセット 前面衝突を判別することが重要課題となる. より正確に衝突を判別するには,車両の減速 度に加えて車両変形の程度を的確に検出する ことが有効であるが,一般的な加速度センサ だけでは極めて困難である. 車両構造の破壊と変形を検知する方法とし ては,近年,構造音響(AE:Acoustic Emission) を 測 定 す る 手 法 が 研 究 さ れ て い る( 4 ),( 5 ). 20 kHz 近傍までの高周波振動が検出できるセ ンサを車両に設置することにより,衝突時の 構造音響を検知し,車両の変形を推定する.衝 突判定は,構造音響による車両変形の要因を論文
大 﨑 達 治*1 袁 方*2 曽 傑 男*2Tatsuji OSAKI Fang YUAN Jienan ZENG
衝突判定に組み込むことにより,迅速かつ正 確な識別が可能となる.本研究では,オフセッ ト前面衝突や悪路走行などの様々な衝撃条件 下において,SRS 用 ECU 上の構造音響セン サで検出したデータのスペクトル解析を実施 し,衝突形態や走行状態による特徴を明らか にする.また,構造音響センサと加速度センサ のみで,エアバック展開が必要な衝突形態を 判別する手法を検討する.
2.車両試験方法
本試験の供試車両は一般的な小型ワゴン タイプであり,SRS 用 ECU は車両ダッシュ ボード下部のセンタートンネル上に搭載され る.この SRS 用 ECU には加速度センサが組 み込まれ,構造音響センサは ECU 上に設置さ れる.前者は 400 Hz 以下の低周波帯域を±7% の精度で検出可能であり,後者は 5 k~20 kHz の高周波帯域を±10% の精度で検出可能であ る.それぞれの搭載位置の概略を Fig. 1 に示 す.また,構造音響センサからの出力(以下, *1 開発本部 第0開発部 *2 京濱電子装置研究開発(上海)有限公司 ※ 2013 年 5 月 15 日受付,(公社)自動車技術会の許諾を得て,2012 年秋季大会学術講演会前刷集 No.101-12, 20125768 より,加筆修正 して転載Accelerometer AE Sensor ECU AE 信号)はサンプリング周波数 50 kHz にて計 測し,加速度センサからの出力はサンプリン グ周波数 10 kHz にて計測する. 衝突試験および走行試験の種類と主な条件 を Table 1 に示す.Euro NCAP で評価される オフセット前面衝突試験(以下,ODB 64 kph) においては,供試車両を速度 64 km/h,バリ アとのオフセット率 40% にて,ハニカム形状 のアルミ製バリアへ衝突させる.本試験の供 試車両においては,シートベルトのプリテン ショナ作動およびエアバック展開が必須であ り,プリテンショナ作動は 25 ms 以内,エア バック展開は 50 ms 以内を要求される.AZT により規定されたオフセット前面衝突試験 (以下,A Z T 15 kph)では,供試車両を速度 15 km/h,バリアとのオフセット率 40% にて, 鋼鉄製バリアへ衝突させる.尚,A Z T 15 kph 試験において,本試験の供試車両ではプリテ ンショナの作動およびエアバックの展開を必 須としない.また,悪路走行の試験において は,落差が大きい陥没路面を任意の一定速度 にて走破するが,エアバックの展開は回避さ れなければならない.ここで,ODB 64 kph お よび AZT 15 kph では,供試車両とバリアの接 触を検出するセンサを設置し,計測開始の基 準を衝突時とする.また,悪路走行の試験にお ける計測開始は手動であるため,その基準は 任意である. Barrier Type Deformable Rigid -Airbag Deployment Must be done
Not must be done
Must be avoided Vehicle Speed 64 km/h 15 km/h Arbitrary Test Code ODB64kph AZT15kph Rough Road
Table 1 Vehicle Test Conditions
Fig. 1 Location of AE Sensor and Accelerometer
Embedded in ECU for SRS Fig. 2 Raw Signals Accumulated by an AE Sensor with a Sampling Rate of 50 kHz in Vehicle Tests
3.結果および考察
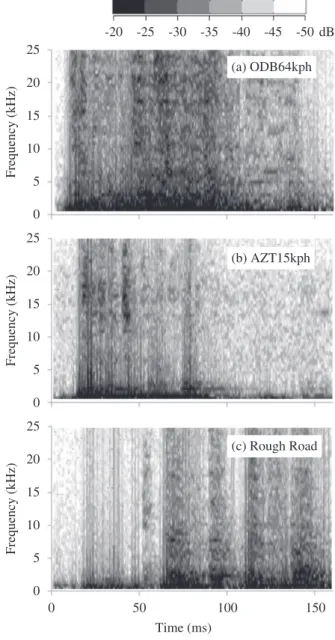
実車試験から得られたサンプリング周期 50 kHz の AE 信号を Fig. 2 に示す.それぞれ (a)ODB 64 kph,(b)AZT 15 kph および(c)悪 路走行の試験結果である. Fig. 2(a)より,ODB 64 kph の試験において (a) ODB64kph 80 40 0 -40 -80 120 Acceleration (G ) -120 Acceleration (G ) (b) AZT15kph 80 40 0 -40 -80 120 -120 Acceleration (G) (c) Rough Road 80 40 0 -40 -80 120 -120 0 100 Time (ms) 50 150は,衝突後約 5 ms から加速度が増大し始め, 約 40 ms までの間は 40G 前後を示し,その後 最大 80G 近傍まで加速度が増加する.約 90 ms 以降は衝突イベントが終了するため,急速に 加速度が減衰する.AZT 15 kph の試験におい ては,Fig. 2(b)に示す通り,衝突後約 10 ms か ら加速度が増大し始め,約 80 ms までの間は 40G 前後示す.その後衝突イベントが終了す るため,加速度が減衰する.また,Fig. 2(a)に 示す O D B 64 kph と比較すると,A Z T 15 kph の約 50 ms までの加速度は,O D B 64 kph の 約 40 ms までの加速度と比較的類似であり,加 速度のピーク値で衝突形態を判別することは 不可能である.Fig. 2(c)より,悪路走行の試 験においては,約 60 ms 以降に陥没路面を走破 するため,40G を超える急激な加速度が発生 する.これは,Fig. 2(b)に示した AZT 15 kph と同程度の最大加速度であり,加速度のピー ク値のみによる衝突形態と走行状態の判別は 不可能である.また,160 ms までに4か所の 陥没を走破するが,個々の陥没で生じる加速 度は急速に減衰する.尚,おおよそ 20 ms から 60 ms までの間に生じる 20G 前後の加速度は, 若干の不整地を走行したことが原因である. Fig. 3 は,Fig. 2 に示した AE 信号を短時 間フーリエ変換した結果である.それぞれ (a)ODB 64 kph,(b)AZT 15 kph および(c)悪 路走行を示し,各々の最大値で正規化したも のである. Fig. 3(a)より,ODB 64 kph の試験では,衝 突後 10 ms~25 ms の間と衝突後 40 ms~90 ms の間において,-25 dB 以上の領域が周波数 25 kHz までの全帯域にわたって分布する.ま た,5 kHz 以下の帯域では,-20 dB 以上の領域 が衝突イベント終了まで継続する.Fig. 3(b) より,A Z T 15 kph の試験では,約 20 ms~ 40 ms の間において,-25 dB 以上の領域が周波 数 10 k~20 kHz の帯域に分布する.特に,周 波数 15 kHz 近傍において,約 -20 dB の領域 が集中する.衝突イベントが終了する約 80 ms 以降では,周波数 5 k~25 kHz の帯域におい て,-35 dB 以下の領域が大半を占める.また, 5 kHz 以下の帯域では,O D B 64 kph の試験と 同様に,-20 dB 以上の領域が衝突イベント終 了まで継続する.Fig. 3(c)より,悪路走行の試 験においては,陥没路面を走破する約 60 ms 以 降で,-25 dB 以上の領域が 5 k~10 kHz の周波 数帯域に分布する.また,陥没路面を走破する 間は,ODB 64 kph や AZT 15 kph の試験と同様 に,-20 dB 以上の領域が 5 kHz 以下の帯域に おいて大半を占める. 以上のことから,いずれの実車試験にお いても,イベント開始後は,5 kHz 以下の帯
Fig. 3 Short Time Fourier Transform Spectrograms of AE Sensor Signals in Vehicle Tests
(a) ODB64kph 20 15 10 5 0 25 Frequency (kHz) (b) AZT15kph 20 15 10 5 0 25 Frequency (kHz) (c) Rough Road 20 15 10 5 0 25 Frequency (kHz) 0 100 Time (ms) 50 150 -20 -25 -30 -35 -40 -45 -50 dB
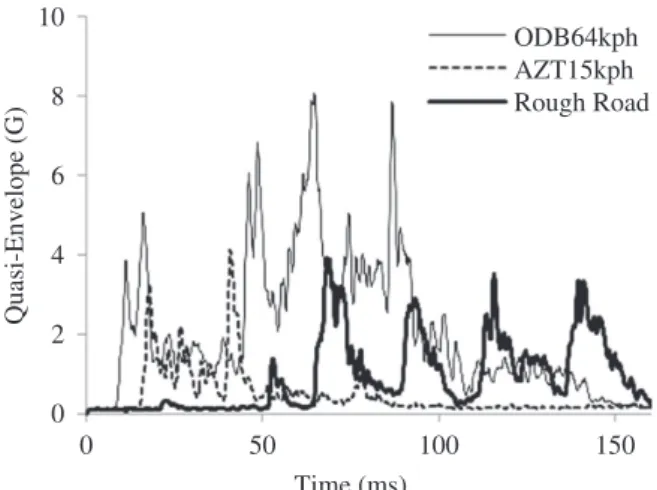
域で -20 dB 以上の領域が大半を占め,衝突 形態や走行状態の判別は困難である.一方 で,ODB 64 kph の試験は 5 k~20 kHz 帯域に, AZT 15 kph の試験は 15 kHz 近傍に,悪路走行 の試験は 5k~10 kHz 帯域に -25 dB 以上の領 域が分布する傾向を示す.従って,周波数 5 k ~20 kHz 帯域の AE 信号を比較評価すること は,衝突形態や走行状態の判別に有効である. F i g . 2 に示した A E 信号の疑似包絡線を Fig. 4 に示す.疑似包絡線は SRS ユニット 上で算出可能なように疑似的な算出手法にて 算出した.疑似包絡線は,加速度波形に 5 k~ 20 kHz のバンドパス処理を施し絶対値処理を 実施した後に,400 Hz のローパスフィルタを 施すことにより算出した. O D B 64 kph の疑似包絡線は,約 10 ms~ 25 ms の間に2つの 4~5G のピークが現れ, その後,約 40 ms~80 ms の間は断続的に 6~ 8G のピークが現れる.約 90 ms 以降は衝突イ ベントが終了するため,2G を超えるピーク は観察されない.A Z T 15 kph の疑似包絡線 は,約 20 ms~50 ms にかけて断続的に約 2~ 4G のピークが現れ,特に約 20 ms と約 40 ms の2か所で,3~4G の大きなピークが観察さ れる.その後,50 ms 以降の衝突イベント後半 では,2G を超えるピークは現れない.衝突イ ベント全体における疑似包絡線の最大値は, ODB 64 kph の方が AZT 15 kph よりも大きい が,約 40 ms 以内で疑似包絡線のピークを比 較すると,ODB 64 kph と AZT 15 kph のピー クは判別し難い.悪路走行の疑似包絡線は, 約 60 ms 以降に陥没路面を走破するため,3~ 4G の大きなピークが4か所で確認できる.こ れらの疑似包絡線のピーク値は,約 40 ms 以内 の ODB 64 kph および AZT 15 kph のピーク値 と同等であり,イベント開始が予測できない実 際の状況においては,衝突形態および走行状態 の判定を実施するには十分な差異があるとは 言えない.特に,ODB64kph の約10ms におけ る 4G 弱のピークと,AZT15kph の約20ms に おける 3G 強のピークと,悪路走行の約 65 ms における 4G 強のピークは判別が困難である. 加速度センサの計測値から算出した変位 量を Fig. 5 に示す.ODB 64 kph において,変 位量は約 15 ms より増加し始め,約 90 ms で 150 mm に到達するが,100 ms 以降は緩やか な増加を示す.A Z T 15 kph では,変位量が 約 20 ms より徐々に増加し,約 80 ms で変位量 が最大 40 mm となる.悪路走行における変位 量は全計測時間において,ほぼ 0 mm に近い値 を示す.これは,速度一定の悪路走行において 発生する加速度が,加速側と減速側でほぼ等 しいためである.衝突から約 15 ms 以内におい て,ODB 64 kph および AZT 15 kph の結果を
Fig. 4 Quasi-Envelopes of AE Sensor Signals in Vehicle Tests
Fig. 5 Calculated Displacement from Acceleration Measuring with Accelerometer in Vehicle Tests 8 6 4 2 0 10 Quasi-Envelope (G) 0 100 Time (ms) 50 150 ODB64kph AZT15kph Rough Road 150 100 50 0 200 Displacement (mm) 0 100 Time (ms) 50 150 ODB64kph AZT15kph Rough Road
判別することは不可能であるが,それ以降で は,ODB 64 kph の変位量が AZT 15 kph よりも 常に大きい値を示す.また,悪路走行の変位量 は常時 0 mm 近傍を示すため,ODB 64 kph では 約 15 ms 以降,AZT 15 kph では約 20 ms 以降に おいて,悪路走行と判別することが可能であ る.但し,閾値に余裕を持たせることを考慮す ると,衝突から 50 ms 以内における変位量は, 衝突形態および走行状態の判定を実施するに 十分な差異があるとは言えない. Fig. 4 に示した AE 信号の疑似包絡線と, F i g . 5 に示した加速度センサの計測値から 算出した変位量から,同一時刻における変 位量と疑似包絡線の関係を F i g . 6 に示す. 尚,O D B 64 kph については,変位量が 8 mm に達する衝突から約 30 ms までのデータを, A Z T 15 kph においては,変位量が 8 mm に達 する衝突から約 35 ms までのデータを示す.ま た,悪路走行のデータは,計測時間 160 ms ま での全てを示す. ODB 64 kph では,変位量が約 0.2 mm におい て疑似包絡線が約 3.8G を示し,変位量 2.3 mm 前後で疑似包絡線は 5G 強に達する.また, A Z T 15 kph では,約 0.4 mm の変位量におい て疑似包絡線が約 3G を示すが,変位量 1.5~ 8 mm における疑似包絡線は最大でも約 2G に 止まる.悪路走行では,約 1.5 mm 以内の範囲 で変位量が増減を繰り返し,疑似包絡線は最 大で約 4G に至る.ここで,1 mm 未満の変位 量において,O D B 64 kph および A Z T 15 kph を比較すると,疑似包絡線は両者とも 3G 以上 を示し,判別は困難である.また,変位量 1 mm 未満は,バリアと車両の剛体部分(エクステン ション)に衝突した直後に相当し,AE 信号に 及ぼす衝突相手の素材や剛性の影響が強いた め,衝突判定には適さない領域である.同様 に,悪路走行との比較においても,判別は不可 能であり,増減を繰り返す約 1.5 mm 以内の変 位量は衝突判定に適さない.一方,変位量が 1.5~8 mm の領域では,ODB 64 kph の疑似包 絡線のみ 5G 強に達しており,エアバックの展 開を必要としない AZT 15 kph や悪路走行と容 易に判別することが可能である. 以上のことから,本研究の条件において, AE 信号の適切な高周波成分を抽出し,同一時 刻における A E 信号の疑似包絡線と,加速度 センサの計測値から算出した変位量を用いる ことで,衝突時の衝突相手の素材や剛性の影 響を受けずに,エアバックの展開が必要な衝 突を判定できる.
4.おわりに
オフセット前面衝突および悪路走行の車両 試験において,SRS 用 ECU 上の構造音響セ ンサで検出したデータのスペクトル解析を実 施し,その特徴を明らかにした.また,構造音 響センサと加速度センサのみで,エアバック 展開が必要な衝突形態を判別する手法を検討 した結果,以下の知見を得た. (1) AE 信号の短時間フーリエ変換解析にお いて,ODB 64 kph は 5 k~20 kHz 帯域に, A Z T 15 kph は 15 kHz 近傍に,悪路走行 は 5 k~10 kHz 帯域に -25 dB 以上の領域 が分布する特徴を示す. (2) 衝突イベント全体における O D B 64 kph の疑似包絡線の最大値は約 8G であり,Fig. 6 Crash Detection and Distinction Based on Relation between Calculated Displacement from Accelerometer Signals and Quasi-Envelope of AE Sensor Signals in Vehicle Tests
4 2 0 6 Displacement (mm) 0 2 4 6 8 ODB64kph AZT15kph Rough Road Quasi-Envelope (G )
著 者
大 﨑 達 治 袁 方 曽 傑 男 自動車事故において,衝突検知は人命に係 わる重要な技術の一つで有ります. 衝突をより早く検知し,かつ正確に判断す ることは大変難しく,技術開発は非常に困難 でありました. 本研究開発の一環として S A E の国際学会 に参加し,世界の最新技術動向に触れる貴重 な経験を積み上げることができました. また本研究の成果を通し,ケーヒンで培っ た技術を世界に PR をすることができました. 本研究にて得られた研究成果が,多くの人 命を救う第一歩となり社会に貢献できればと 思います. 末 筆 と な り ま し た が ,本 技 報 掲 載 お よ び学会発表におきまして御指導,御助言を 頂きました皆様に深く感謝申し上げます. (大﨑,袁,曽) AZT 15 kph や悪路走行における疑似包絡 線の最大値約 4G より大きいが,イベン ト開始が予測できない実際の状況におい て,ODB 64 kph および AZT 15 kph の衝 突直後における 3~4G の疑似包絡線ピー クと,悪路走行における 4G 強の疑似包 絡線ピークは判別が困難である. (3) 加速度センサの計測値から算出した変位 量は,衝突から約 15 ms 以降,AZT 15 kph よりも O D B 64 kph の方が常に大きい値 を示し,悪路走行では常時 0 mm 近傍を示 すが,閾値の余裕を考慮すると,衝突か ら 50 ms 以内における変位量の差異は, 衝突形態および走行状態の判定に不十分 である. (4) A E 信号の適切な高周波成分を抽出し, 同一時刻における AE 信号の疑似包絡線 と,加速度センサの計測値から算出した 変位量を用いることで,エアバックの展 開が必要な ODB 64 kph と,展開が不要な AZT15kph および悪路走行を判定できる.参考文献
(1) トヨタ自動車:乗員保護装置の起動制御 装置,特開平 11-59322 (1999) (2) 本 田 技 研 工 業:セ ン サ 配 設 構 造 ,特 開 2006-62542 (2006) (3) 遠藤淳一,他3名:新興国市場向けローコ ストエアバッグ ECU 開発,富士通テン技 報,Vol.29, No.1(2011)(4) Michael Feser, et al.: Advanced Crash Discrimination using Crash Impact Sound Sensing (CISS), SAE Paper 2006-01-1590 (2006)
(5) Sebastian Brust, et al.: Crash Type Distinction Using Structure-Borne Sound Sensing, 21st International Technical Conference on the Enhanced Safety of Vehicles, Paper No.09-0230 (2009)