付録
D
数値予報研修テキスト で用いた表記と 統計的検証に用いる 代表的な 指標
∗ 本テキスト で使用し た表記と 統計的検証に用いる 代 表的な 指標な ど について 以下に説明する 。 D.1 研修テキスト で用いた表記 D.1.1 時刻の表記について 本テキスト では、 時刻を 表記する 際に、 通常国内で用 いら れている 日本標準時 (JST: Japan Standard Time) のほかに 、 協定世界時 (UTC: Coordinated Universal Time)を 用いて いる 。 数値予報では国際的な 観測デー タ の交換やプロ ダク ト の利用等の利便を 考慮し て 、 時 刻は UTC で表記さ れる こ と が多い。 JST は UTC に 対し て 9 時間進んでいる 。 D.1.2 分解能の表記について 本テキスト では、 全球モデルの分解能について、 xx を 水平方向の切断波数、 yy を 鉛直層数と し て、 “TxxLyy”1 と 表記する こ と がある 。 ま た、 セミ ラ グラ ンジアンモデ ルで線形格子 (北川 2005) を 用いる 場合は “TLxxLyy”2 と 表記する 。 北緯 30 度において 、 TL959 は約 20 km 格子、 TL479 は約 40 km 格子、 TL319 は約 55 km 格 子、 TL159 は約 110 km 格子に相当する 。 D.1.3 予測時間の表記について 数値予報では、 統計的な 検証や事例検証の結果を 示 す際に、 予報対象時刻のほかに、 初期時刻から の経過 時間を 予報時間 (FT: Forecast Time3)と し て表記し て いる 。 本テキスト では、 予報時間を 「 予報時間」 =「 予報対象時刻」 –「 初期時刻」 で定義し 、 例え ば、 6 時間予報の場合、 FT=6 と 表記 し て おり 、 時間の単位 [h] を 省略し て いる 。 D.1.4 ア ン サン ブル予報の表記について アン サン ブル予報では、 複数の予測の集合( アン サ ン ブル) を 統計的に処理し 、 確率予測等の資料を 作成 する 。 本テキスト では、 予測の集合の平均を 「 アン サ ン ブル平均」 、 個々 の予測を 「 メ ン バー」 と 呼ぶ。 ま た、 摂動を 加えている メ ン バーを 「 摂動ラ ン 」、 摂動を 加えていないメ ン バーを 「 コ ン ト ロ ールラ ン 」 と 呼ぶ。 D.1.5 緯度、 経度の表記について 本テキスト では、 緯度、 経度について、 アルフ ァ ベッ ト を 用いて例えば「 北緯 40 度、 東経 130 度」 を「 40◦ N, 130◦E」、「 南緯 40 度、 西経 130 度」 を「 40◦ S, 130◦W」 な ど と 略記する 。 * 西本 秀祐 1 Tは三角形(Triangular)波数切断、 Lは層(Level)を 意味 する 。 2 TLのLは線形(Linear)格子を 意味する 。 3 Forecast Rangeな ど と 記述さ れる こ と が多い。 D.2 統計的検証に用いる 代表的な指標 D.2.1 平均誤差、 二乗平均平方根誤差、 誤差の標準 偏差、 改善率 予測誤差を 表す基本的な指標と し て、 平均誤差( ME: Mean Error、 バイ アスと 表記する 場合も ある ) と 二乗 平均平方根誤差4(RMSE: Root Mean Square Error) がある 。 こ れら は次式で定義さ れる 。 ME ≡ 1 N N ∑ i=1 (xi− ai) (D.2.1) RMSE ≡ v u u t 1 N N ∑ i=1 (xi− ai) 2 (D.2.2) こ こ で、 N は標本数、 xiは予測値、 aiは実況値である ( 実況値は客観解析値、 初期値や観測値が利用さ れる こ と が多い)。 ME は予測値の実況値から の偏り の平均で あり 、 0 に 近いほど 平均的な 状態の実況から のずれが 小さ いこ と を 示す。 RMSE は最小値の 0 に近いほど 予 測が実況に近いこ と を 示す。 ま た、 北半球平均等、 広 い領域に対し て 格子点値によ る 平均を と る 場合は、 格 子点が代表する 面積重みを かけて算出する 場合がある 。 RMSEは ME の寄与と それ以外を 分離し て 、 RMSE2= ME2+ σ2e (D.2.3) σ2 e= 1 N N ∑ i=1 (xi− ai− ME)2 (D.2.4) と 表すこ と ができ る 。 σeは誤差の標準偏差である 。 本テキスト では、 予測に改良を 加え た際の評価指標 と し て 、 RMSE の改善率 (%) を 用いる 場合があ る 。 RMSEの改善率は次式で定義さ れる 。RMSE改善率 ≡ RMSEcntl− RMSEtest RMSEcntl
×100 (D.2.5)
( RMSE 改善率 ≤ 100)
こ こ で、 RMSEcntlは基準と なる 予測の、 RMSEtestは 改良を 加え た予測の RMSE である 。
D.2.2 ア ノ マリ ー相関係数
ア ノ マ リ ー相関係数 (ACC: Anomaly Correlation Coefficient)と は、 予測値の基準値から の偏差( ア ノ マ リ ー) と 実況値の基準値から の偏差と の相関係数で 4 気 象 庁 HP http://www.data.jma.go.jp/fcd/yoho/ kensho/explanation.htmlと 表記を 統一する ため、 昨年度 ま での研修テキ ス ト での表記(平方根平均二乗誤差)から 変 更し た。
あり 、 次式で定義さ れる 。 ACC ≡ N ∑ i=1 (Xi− X) (Ai− A ) v u u t N ∑ i=1 (Xi− X )2 N ∑ i=1 (Ai− A )2 (−1 ≤ ACC ≤ 1) (D.2.6) ただし 、 Xi= xi− ci, X = 1 N N ∑ i=1 Xi (D.2.7) Ai= ai− ci, A = 1 N N ∑ i=1 Ai (D.2.8) である 。 こ こ で、 N は標本数、 xiは予測値、 aiは実況 値、 ciは基準値である 。 基準値と し て は気候値を 用い る 場合が多い。 アノ マ リ ー相関係数は予測と 実況の基 準値から の偏差の相関を 示し 、 基準値から の偏差の増 減のパタ ーン が完全に一致し て いる 場合には最大値の 1を と り 、 相関が全く な い場合に は 0 を と り 、 逆に 完 全にパタ ーン が反転し て いる 場合には最小値の −1 を と る 。 な お、 アノ マ リ ー相関係数や付録 D.2.1 の平均 誤差、 二乗平均平方根誤差の関係は、 梅津ほか (2013) に詳し い。 D.2.3 スプレ ッ ド スプレ ッ ド は、 アン サン ブル予報のメ ン バーの広が り を 示す指標であり 、 次式で定義さ れる 。 スプレ ッ ド ≡ v u u t 1 N N ∑ i=1 ( 1 M M ∑ m=1 (xmi− xi)2 ) (D.2.9) こ こ で、 M はアン サン ブル予報のメ ン バー数、 N は標 本数、 xmiは m 番目のメ ン バーの予測値、 xiは xi ≡ 1 M M ∑ m=1 xmi (D.2.10) で定義さ れる アン サン ブル平均である 。 D.3 カテゴリ ー検証で用いる 指標 カ テゴリ ー検証では、 ま ず、 対象と な る 現象の有無 を 予測と 実況それぞれについて 判定し 、 その結果によ り 標本を 分類する 。 そし て 、 それぞれのカ テゴリ ーに 分類さ れた事例数を 基に、 予測の特性を 検証する と い う 手順を 踏む。 D.3.1 分割表 分割表は、 カ テゴリ ー検証において それぞれのカ テ ゴリ ーに 分類さ れた事例数を 示す表( 表 D.3.1) であ る 。 付録 D.3.2 から D.3.12 に示す各スコ アは、 表 D.3.1 に示さ れる 各区分の事例数を 用いて定義さ れる 。 ま た、 以下では全事例数を N=FO+FX+XO+XX、 実況「 現 象あり 」 の事例数を M=FO+XO、 実況「 現象なし 」 の 事例数を X=FX+XX と 表す。 表 D.3.1 カ テ ゴ リ ー検証で用いる 分割表。 FO, FX, XO, XXはそれぞれの事例数を 示す。 実況 計 あり な し 予測 あり 適中(FO) 空振り (FX) FO+FX な し 見逃し (XO) 適中(XX) XO+XX 計 M X N D.3.2 適中率 適中率は、 予測が適中し た割合であり 、 次式で定義 さ れる 。 適中率 ≡ FO + XX N (0 ≤適中率 ≤ 1) (D.3.1) 最大値の 1 に近いほど予測の精度が高いこ と を 示す。 D.3.3 空振り 率 空振り 率は、 予測「 現象あり 」 の事例数に対する 空 振り ( 予測「 現象あり 」 かつ実況「 現象なし 」) の割合 であり 、 次式で定義さ れる 。 空振り 率 ≡ FX FO + FX (0 ≤空振り 率 ≤ 1) (D.3.2) 最小値の 0 に 近いほど 空振り が少な いこ と を 示す。 本テキスト では分母を FO+FX と し て いる が、 代わり に N と し て 定義する 場合も ある 。 D.3.4 見逃し 率 見逃し 率は、 実況「 現象あり 」 の事例数に対する 見 逃し ( 実況「 現象あり 」 かつ予測「 現象なし 」) の割合 であり 、 次式で定義さ れる 。 見逃し 率 ≡ XO M (0 ≤見逃し 率 ≤ 1) (D.3.3) 最小値の 0 に 近いほど 見逃し が少な いこ と を 示す。 本テキスト では分母を M と し て いる が、 代わり に N と し て 定義する 場合も ある 。 D.3.5 捕捉率 捕捉率 (Hr: Hit Rate)は、 実況「 現象あり 」 のと き に予測が適中し た割合であり 、 次式で定義さ れる 。 Hr≡ FO M (0 ≤ Hr≤ 1) (D.3.4) 最大値 1 に近いほど 見逃し が少な いこ と を 示す。 捕 捉率は、 ROC 曲線( 付録 D.4.5) のプロ ッ ト に用いら れる 。
D.3.6 体積率 体積率 (Vr: Volume Rate)は、 全事例のう ち 予測の 「 現象あり 」 の事例の割合を 示す。 Vr≡ FO + FX N (D.3.5) 複数の予測の捕捉率が等し い場合、 体積率が小さ い予 測ほど 空振り が少な いよ い予測と 言え る 。 D.3.7 誤検出率
誤検出率 (Fr: False Alarm Rate)は、 実況「 現象な し 」 のと きに予測が外れた割合である 。 空振り 率 (D.3.3) と は分母が異な り 、 次式で定義さ れる 。 Fr≡ FX X (0 ≤ Fr≤ 1) (D.3.6) 最小値の 0 に近いほど 、 空振り が少なく 予測の精度 が高いこ と を 示す。 誤検出率は捕捉率( 付録 D.3.5) と と も に ROC 曲線( 付録 D.4.5) のプロ ッ ト に 用いら れる 。 D.3.8 バイ ア ススコ ア
バイ アス スコ ア (BI: Bias Score) は、 実況「 現象あ り 」 の事例数に対する 予測「 現象あり 」 の事例数の比 であり 、 次式で定義さ れる 。 BI ≡ FO + FX M (0 ≤ BI) (D.3.7) 予測と 実況で「 現象あり 」 の事例数が一致する 場合 に 1 と な る 。 1 よ り 大き いほど 予測の「 現象あり 」 の 頻度が過大、 1 よ り 小さ いほど 予測の「 現象あり 」 の 頻度が過小である こ と を 示す。 D.3.9 気候学的出現率 現象の気候学的出現率 Pcは、 標本から 見積も ら れる 現象の平均的な 出現確率であり 、 次式で定義さ れる 。 Pc≡ M N (0 ≤ Pc≤ 1) (D.3.8) こ の量は実況のみから 決ま り 、 予測の精度にはよ ら な い。 予測の精度を 評価する 際の基準値の設定にし ば し ば用いら れる 。 D.3.10 スレ ッ ト スコ ア スレ ッ ト スコ ア (TS: Threat Score) は、 予測ま たは 実況で「 現象あり 」 の場合の予測適中事例数に着目し て予測精度を 評価する 指標であり 、 次式で定義さ れる 。 TS ≡ FO FO + FX + XO (0 ≤ TS ≤ 1) (D.3.9) 出現頻度の低い現象( N≫M、 し たがって、 XX≫FO, FX, XOと な っ て 、 予測「 現象な し 」 によ る 寄与だけ で適中率が 1 に近い現象) について XX の影響を 除い て 検証する のに有効である 。 本スコ アは最大値の 1 に 近いほど 予測の精度が高いこ と を 示す。 な お、 スレ ッ ト スコ アは現象の気候学的出現率の影響を 受けやすく 、 異な る 標本や出現率の異な る 現象に対する 予測の精度 を 比較する のには適さ ない。 こ の問題を 緩和する ため、 次項のエク イ タ ブルスレ ッ ト スコ アな ど が考案さ れて いる 。 D.3.11 エク イ タ ブルスレ ッ ト スコ ア エ ク イ タ ブ ル ス レ ッ ト ス コ ア (ETS: Equitable Threat Score)は、 前項のス レ ッ ト ス コ ア が現象の気 候学的出現率の影響を 受け やすいため、 気候学的な 確 率で「 現象あり 」 が適中し た頻度を 除いて求めたスレ ッ ト スコ アであり 、 次式で定義さ れる (Schaefer 1990)。 ETS ≡ FO − Sf FO + FX + XO − Sf ( −1 3 ≤ ETS ≤ 1 ) (D.3.10) ただし 、 Sf = Pc(FO + FX) (D.3.11) であ る 。 こ こ で、 Pc は現象の気候学的出現率( 付録 D.3.9)、 Sfは「 現象あり 」 を ラ ン ダムに FO+FX 回予 測し た場合( ラ ンダム予測) の「 現象あり 」 の適中事例 数である 。 本スコ アは、 最大値の 1 に近いほど 予測の 精度が高いこ と を 示す。 ま た、 ラ ン ダム 予測で 0 と な り 、 FO=XX=0, FX=XO=N/2 の場合に最小値 −1/3 を と る 。 D.3.12 スキルスコ ア スキルスコ ア (Skill Score) は気候学的確率など によ る 予測の難易を 取り 除いて 、 予測の技術力を 評価する 指数であり 、 一般に次式のよ う に定義さ れる 。 スキルスコ ア ≡ Sf cst− Sref Spf ct− Sref (D.3.12) こ こ で、 Sf cst, Spf ct, Srefは、 評価対象の予測・ 完全予 測・ 比較の基準と な る 予測( 気候学的確率な ど ) の各 スコ ア( 適中率) である 。 本スコ アは、 最大値の 1 に 近いほど 予測の精度が高いこ と と 示し 、 比較の基準と な る 予測よ り も 精度が劣る 場合、 負の値と な る 。 代表的な ス キ ルス コ ア は Heidke のス キ ルス コ ア (HSS: Heidke Skill Score)で、 気候学的な 確率で「 現 象あり 」 およ び「 現象な し 」 が適中し た頻度を 除いて 求める 適中率であり 、 次式で定義さ れる 。 HSS ≡FO + XX − S N − S (−1 ≤ HSS ≤ 1) (D.3.13) ただし 、 S = P mc(FO + FX) + P xc(XO + XX), P mc= M N, P xc= X N (D.3.14)
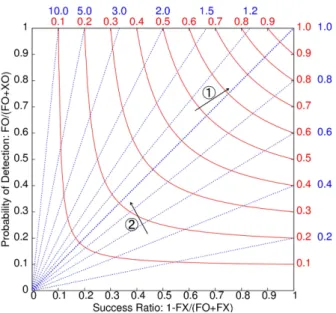
図D.3.1 POD-SRダイ アグラ ムの模式図。 横軸は1-空振り 率、 縦軸は捕捉率、 青の破線はバイ アススコ アの、 赤の実 線はスレ ッ ト スコ アの各等値線。 である 。 こ こ で、 P mcは「 現象あり 」、 P xcは「 現象 な し 」 の気候学的出現率( 付録 D.3.9) 、 S は「 現象 あり 」 を FO+FX 回( すな わち 、「 現象な し 」 を 残り の XO+XX 回) ラ ン ダムに予測し た場合( ラ ン ダム予 測) の適中事例数である 。 HSS は、 最大値 1 に近づく ほ ど精度が高く 、 ラ ン ダム予測で 0 と なり 、 FO=XX=0, FX=XO=N/2の場合に最小値 −1 を と る 。 ま た、 前項のエク イ タ ブルスレ ッ ト スコ アも スキルス コ アの一つで、 Gilbert Skill Score と も 呼ばれて いる 。
D.3.13 POD-SRダイ ア グラ ム
Roebber (2009)はカ テ ゴ リ 検証に よ る 複数のス コ ア( 捕捉率、 空振り 率、 バイ アススコ ア、 スレ ッ ト ス コ ア) を 一つのグラ フ に表す方法を 考案し た。 検証結 果を 縦軸に 捕捉率 (Hit Rate = POD: Probability Of Detection)、 横軸に 1− 空振り 率 (SR: Success Ratio) を と っ て プロ ッ ト する と 、 捕捉率と 空振り 率から BI と TS が計算でき る ため、 等値線を 目安にバイ アスス コ アと スレ ッ ト スコ アも 確認でき る グラ フ と な る ( 図 D.3.1)。 本テキスト では、 こ れを POD-SR ダイ アグラ ム と 呼ぶ。 各スコ アが 1 に近づく ほど ( グラ フ の右上 へ近づく ほど)、 良い予測と なる 。 こ のグラ フ では 4 つ のスコ アを 一目で確認でき 、 予測特性の変化を 把握し やすい。 特に、 バイ アススコ アと スレ ッ ト スコ アの変 化を 捕捉率と 空振り 率の変化で説明する こ と が容易と な る 。 例えば、 図 D.3.1 の○ のよ う にスコ アが変化する 場1 合、 捕捉率、 空振り 率、 バイ アススコ ア、 スレ ッ ト スコ アのいずれも 改善と なる 。 こ れに対し ○ の場合には、2 一見○ と 同様にバイ アススコ ア、 スレ ッ ト スコ アと も1 改善し て いる が、 空振り 率が増加し て いる 。 空振り 率 が大き いにも かかわら ず、 バイ アススコ ア・ スレ ッ ト スコ アが改善し て いる 理由は、 捕捉率の増加の割合が 空振り 率の増加に比べて 大き いためである 。 こ のよ う に○ と1 ○ ではいずれも バイ アススコ アと スレ ッ ト ス2 コ アがと も に改善し て いる が、 本グラ フ を 用いる こ と で予測の変化傾向の違い( 捕捉率と 空振り 率の変化の 違い) が一目で確認でき る 。 D.4 確率予測に関する 指標など D.4.1 ブラ イ ア スコ ア ブラ イ アスコ ア (BS: Brier Score) は、 確率予測の統 計検証の基本的指標である 。 ある 現象の出現確率を 対 象と する 予測について 、 次式で定義さ れる 。 BS ≡ 1 N N ∑ i=1 (pi− ai) 2 (0 ≤ BS ≤ 1) (D.4.1) こ こ で、 piは確率予測値( 0 から 1) 、 aiは実況値 ( 現象あり で 1、 なし で 0)、 N は標本数である 。 BS は 完全に 適中する 決定論的な ( pi=0ま た は 1 の) 予測 ( 完全予測と 呼ばれる ) で最小値の 0 を と り 、 0 に近い ほど 予測の精度が高いこ と を 示す。 ま た、 現象の気候 学的出現率 Pc = M/N( 付録 D.3.9) を 常に確率予測 値と する 予測( 気候値予測と 呼ばれる ) のブラ イ アス コ ア BScは BSc ≡ Pc(1 − Pc) (D.4.2) と な る 。 ブラ イ アスコ アは、 現象の気候学的出現率の 影響を 受け る ため、 異な る 標本や出現率の異な る 現象 に対する 予測の精度を 比較する のには適さ な い。 例え ば上の BScは Pc依存性を 持ち 、 同じ 予測手法( こ こ では気候値予測) に 対し て も Pcの値に 応じ て 異な る 値を と る (Stanski et al. 1989)。 こ の問題を 緩和する た め、 次項のブラ イ アスキルスコ アが考案さ れて いる 。 D.4.2 ブラ イ ア スキルスコ ア
ブラ イ アスキルスコ ア (BSS: Brier Skill Score) は、 ブラ イ アスコ アに基づく スキルスコ アであり 、 通常気 候値予測を 基準と し た予測の改善の度合いを 示す。 本 スコ アは、 ブラ イ アスコ ア BS、 気候値予測によ る ブラ イ アスコ ア BScを 用いて BSS ≡ BSc− BS BSc (BSS ≤ 1) (D.4.3) で定義さ れ、 完全予測で 1、 気候値予測で 0、 気候値予 測よ り 誤差が大き いと 負と な る 。 D.4.3 Murphyの分解 Murphy (1973)は、 ブラ イ アスコ アと 予測の特性と の関連を 理解し やすく する ため、 ブラ イ アスコ アを 信頼 度 (Reliability)、 分離度 (Resolution)、 不確実性 (Un-certainty)の 3 つの項に分解し た。 こ れを Murphy の 分解と 呼ぶ( 高野 2002 な ど に詳し い)。
確率予測において、 確率予測値を L 個の区間に分け、 標本を 確率予測値の属する 区間に応じ て 分類する こ と を 考え る 。 確率予測値が l 番目の区間に属する 標本数 を Nl(N =∑Ll=1Nl)、 こ のう ち 実況が「 現象あり 」 で あっ た事例数を Ml(M = ∑ L l=1Ml)、 確率予測値の l 番目の区間の区間代表値を plと する と 、 Murphy の分 解によ り ブラ イ アスコ アは以下のよ う に表さ れる 。 BS =信頼度 − 分離度 + 不確実性 (D.4.4) 信頼度 = L ∑ l=1 ( pl− Ml Nl )2N l N (D.4.5) 分離度 = L ∑ l=1 ( M N − Ml Nl )2N l N (D.4.6) 不確実性 = M N ( 1 −M N ) (D.4.7) 信頼度は、 確率予測値 (pl)と 実況での現象の出現相 対頻度 (Ml/Nl)が一致すれば最小値の 0 と なる 。 分離 度は、 確率予測値に対応する 実況での現象の出現相対 頻度 (Ml/Nl)が気候学的出現率 (Pc = M/N )から 離 れて いる ほど 大き い値を と る 。 不確実性は、 現象の気 候学的出現率のみによ っ て 決ま り 、 予測の手法にはよ ら ない。 例え ば、 Pc = 0.5の場合に不確実性は最大値 の 0.25 を と る 。 ま た、 不確実性=BScが成り 立つ。 こ れら を 用いて 、 ブラ イ アスキルスコ アを 次のよ う に書 く こ と ができ る 。 BSS = 分離度 − 信頼度 不確実性 (D.4.8) D.4.4 確率値別出現率図
確率値別出現率図( Reliability Diagram, Attributes Diagramと も 呼ばれる ) は、 予測さ れた現象出現確率 Pfcstを 横軸に 、 実況で現象が出現し た 相対頻度 Pobs を 縦軸にと り 、 確率予測の特性を 示し た図である ( 図 D.4.1参照、 Wilks 2011 などに詳し い)。 一般に、 確率 予測の特性は確率値別出現率図上で曲線と し て 表さ れ る 。 こ の曲線を 信頼度曲線 (Reliability curve) と 呼ぶ。 信頼度曲線の特性は、 Murphy の分解( 付録 D.4.3) の信頼度、 分離度と 関連付ける こ と ができ る 。 横軸 Pfcst の各値について、 信頼度( ある いは分離度) への寄与は、 信頼度曲線上の点から 対角線 Pobs=Pfcst上の点( ある い は直線 Pfcst=Pc上の点) ま での距離の二乗と し て表現 さ れる 。 Pfcstの各値でのこ れら の寄与を 、 標本数に比例 する 重みで平均し て信頼度( ある いは分離度) が得ら れ る 。 例えば、 no-skill line( 直線 Pobs= (Pfcst+ Pc) /2) 上の点では、 信頼度と 分離度への寄与は等し い大き さ を 持ち 、 ブラ イ ア ス キ ルス コ ア への寄与が 0 と な る 。 ま た no-skill line と 直線 Pfcst = Pcと の間の領域( 分 離度への寄与 > 信頼度への寄与、 図 D.4.1 灰色の領域) 内に位置する 点は、 ブラ イ アスキルスコ アに正の寄与 を 持つ。 特別な 場合と し て 、 気候値予測( 付録 D.4.1) では 1点 (Pfcst, Pobs) = (Pc, Pc)が信頼度曲線に対応する 。 ま た、 次の 2 つの特性を 示す確率予測は精度が高い。 • 信頼度曲線が対角線に( 信頼度への寄与が最小値 の 0 に) 近い。 • 信頼度曲線上の大き い標本数に 対応する 点が点 (Pfcst, Pobs) = (Pc, Pc)( 気候値予測) から 離れ た位置( 確率値別出現率図の左下ま たは右上寄り ) に分布する ( 分離度が大き い)。
D.4.5 ROC曲線、 ROC 面積、 ROC 面積スキルス
コ ア 確率予測では、 現象の予測出現確率にある 閾値を 設 定し 、 こ れを 予測の「 現象あり 」「 現象なし 」 を 判定す る 基準と する こ と が可能である 。 様々 な 閾値それぞれ について 作成し た分割表を 基に、 閾値が変化し たと き の Fr–Hr平面( こ こ で、 Frは誤検出率( 付録 D.3.7)、 Hrは捕捉率( 付録 D.3.5)) 上の軌跡を プロ ッ ト し た も のが ROC 曲線( ROC curve: Relative Operating Characteristic curve、 相対作用特性曲線) である ( 図 D.4.2参照、 高野 2002 などに詳し い)。 平面内の左上方 の領域では Hr> Frであり 、 平面の左上側に膨ら んだ ROC曲線特性を 持つ確率予測ほど精度が高いも のと 見 なせる 。 し たがって、 ROC 曲線から 下の領域( 図 D.4.2 灰色の領域) の面積( ROCA: ROC area、 ROC 面積) は、 情報価値の高い確率予測ほど大き く なる 。 ROC 面 積スキルスコ ア (ROCASS: ROC Area Skill Score) は、 情報価値のな い予測 (Hr= Fr)を 基準と し て ROC 面 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
P
obs 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0P
fcst 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0P
obs 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0P
fcst Pobs=Pc Pobs=(Pfcst+Pc)/2 Pobs=Pfcst Pfcst=Pc Reliability Resolution no skill 図D.4.1 確率値別出現率図の模式図。 横軸は予測現象出現 確率、 縦軸は実況現象出現相対頻度、 実線が信頼度曲線で ある 。 対角線、 直線Pobs= Pcと の差の二乗がそれぞれ信 頼度(Reliability)、 分離度(Resolution)への寄与に対応し ている 。 灰色の領域内の点はブラ イ アスキルスコ アに正の 寄与を 持つ。積を 評価する も のであり 、 次式で定義さ れる 。
ROCASS ≡ 2(ROCA − 0.5) (−1 ≤ ROCASS ≤ 1) (D.4.9) 本ス コ ア は、 完全予測で最大値の 1 を と る 。 ま た 、 情報価値のない予測( 例えば、 区間 [0, 1] から 一様ラ ン ダム に抽出し た値を 確率予測値と する 予測な ど ) では 0と な る 。 D.4.6 CRPS
CRPS (Continuous Ranked Probability Score)は、 確率予測の統計検証の指標の 1 つである 。 連続物理量 xに対する CRPS は次式で定義さ れる 。 CRPS = 1 N N ∑ i=1 ∫ ∞ −∞ [Pi(x) − Ai(x)] 2 dx (0 ≤ CRPS) (D.4.10) こ こ で、 N は標本数、 Piと Aiはそれぞれ予測と 実況 の累積分布関数であり 、 次式で定義さ れる 。 Pi(x) = ∫ x −∞ ρi(x ′ ) dx′ (D.4.11) Ai(x) = H (x − ai) (D.4.12) こ こ で、 ρiは予測さ れた確率密度関数、 aiは実況値、 H(x)は階段関数である 。 H(x) = 0 x < 0 1 x ≥ 0 (D.4.13) CRPSは完全に適中する 決定論的な 予測で最小値 0 を と り 、 0 に近いほど予測の精度が高いこ と を 示す。 単 位は物理量 x と 同じ である 。 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Hr
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0Fr
ROC area ROC curve Hr = Fr higher Threshold lower Threshold 図D.4.2 ROC曲線の模式図。 横軸はFr、 縦軸はHrであ る 。 灰色の領域の面積がROC面積である 。 ま た、 物理量 x が閾値 t 以下と な る 現象の確率予測 に対する ブラ イ アスコ アを BS(t) と おく と 、 CRPS = ∫ ∞ −∞ BS(t)dt (D.4.14) の関係がある 。 参考文献 梅津浩典, 室井ち あし , 原旅人, 2013: 検証指標. 数値予 報課報告・ 別冊第 59 号, 気象庁予報部, 6–15. 北川裕人, 2005: 全球・ 領域・ 台風モデル. 平成 17 年度 数値予報研修テキスト , 気象庁予報部, 38–43. 高野清治, 2002: アン サン ブル予報の利用技術. 気象研 究ノ ート , 201, 73–103.Murphy, A. H., 1973: A new vector partition of the probability score. J. Appl. Meteor., 12, 595–600. Roebber, P. J., 2009: Visualizing Multiple Measures
of Forecast Quality. Wea. Forecasting, 24, 601–608. Schaefer, J. T., 1990: The critical success index as an indicator of warning skill. Wea. Forecasting, 5, 570–575.
Stanski, H. R., L. J. Wilson, and W. R. Burrows, 1989: Survey of common verification methods in meteorology. Research Rep., 89-5, Forecast Re-search Division, Atmospheric Envirnment Service, Environment Canada, 114 pp.
Wilks, D. S., 2011: Statistical Methods in the Atmo-spheric Sciences, International Geophysical, Vol. 100. Academic Press, 334-340 pp.