PAPER
Hybridizing Dragonfly Algorithm with Di ff erential Evolution for Global Optimization
MeiJun DUAN†a), HongYu YANG†, Bo YANG††, XiPing WU†,Nonmembers,andHaiJun LIANG†††,Member
SUMMARY Due to its simplicity and efficiency, differential evolution (DE) has gained the interest of researchers from various fields for solving global optimization problems. However, it is prone to premature conver- gence at local minima. To overcome this drawback, a novel hybrid dragon- fly algorithm with differential evolution (Hybrid DA-DE) for solving global optimization problems is proposed. Firstly, a novel mutation operator is in- troduced based on the dragonfly algorithm (DA). Secondly, the scaling fac- tor (F) is adjusted in a self-adaptive and individual-dependent way without extra parameters. The proposed algorithm combines the exploitation ca- pability of DE and exploration capability of DA to achieve optimal global solutions. The effectiveness of this algorithm is evaluated using 30 classi- cal benchmark functions with sixteen state-of-the-art meta-heuristic algo- rithms. A series of experimental results show that Hybrid DA-DE outper- forms other algorithms significantly. Meanwhile, Hybrid DA-DE has the best adaptability to high-dimensional problems.
key words: global optimization, differential evolution, dragonfly algo- rithm, hybrid DA-DE, self-adaptive and individual-dependent
1. Introduction
Differential evolution (DE) is a meta-heuristic optimization method, which is inspired by the laws of natural evolution. It is proposed by Storn and Price[1]. The search process starts with a randomly generated population which is evolved over subsequent generations. DE is becoming more and more popular in engineering applications because it: (1) relies on rather simple concepts and is easy to implement; (2) does not require gradient information; (3) can be utilized in a wide range of problems covering different disciplines. At present, DE is widely used in many research and engineer- ing fields, such as neural network parameter training, pat- tern synthesis, path planning of Unmanned Aerial Vehicle and other research and engineering fields[2]–[4].
The performance of DE is mainly influenced by mu- tation mode, control parameters and crossover mode. In- appropriate configurations of mutation strategies and con- trol parameters can cause stagnation or premature conver- gence. Therefore, many scholars have proposed a series of improved DE algorithms[5]–[33]. The contributions of DE
Manuscript received November 27, 2018.
Manuscript revised March 26, 2019.
Manuscript publicized July 17, 2019.
†The authors are with National Key Lab. of Fundamental Sci- ence on Synthetic Vision, Sichuan University, Chengdu, 610065 China.
††The author is with College of Computer Science, Sichuan University, Chengdu, 610065 China.
†††The author is with College of Air Traffic Management, Civil Aviation Flight University of China, Guanghan, 618307 China.
a) E-mail: [email protected]
DOI: 10.1587/transinf.2018EDP7401
modifications mainly focus on the following four orienta- tions: mutation strategies, control parameters adaption or self-adaption, crossover strategies, hybrid mechanism.
A large number of studies have carried out on improv- ing mutation strategies. A part of studies focused on sin- gle mutation mode. Wang et al.[5]proposed a self-adaptive differential evolution algorithm with improved mutation mode (IMMSADE) by improving “DE/rand/1”. Tang[6]
presented a novel decentralizing and coevolving differ- ential evolution (DCDE) algorithm. Mohamed et al.[7]
presented adaptive guided differential evolution algorithm (AGDE). He and Zhou[8] presented a novel DE variant with covariance matrix self-adaptation (DECMSA). Mo- hamed and Suganthan[9] proposed an enhanced fitness- adaptive differential evolution algorithm with novel muta- tion (EFADE). Moreover, some researchers combined var- ious mutation strategies based on the advantages of dif- ferent mutation modes. Elsayed et al.[10] used multiple search operators in conjunction with multiple constraint handing techniques. Wu and Mallipeddi et al.[11] pro- posed a multi-population ensemble DE (MPEDE). YEH et al.[12]proposed the mixed mutation strategy of Gauss mutation and the “DE/best/1”. Cui et al.[13]proposed an adaptive multiple-elites-guided composite differential evo- lution algorithm with a shift mechanism (AMECoDEs). Wu et al.[14]focused on the high-level ensemble of different DE variants and proposed a new algorithm named EDEV.
Many efforts have been made to tune F and CR adaptively or self-adaptively. Gong and Cai[15]proposed ranking-based mutation operators. Ryoji and Alex[16]pro- posed a parameter adaptation technique for DE (SHADE).
Gong et al.[17] proposed a crossover rate repair tech- nique for the adaptive DE algorithms (Rcr-JADE) based on successful parameters. Awad and Ali et al.[18] pro- posed LSHADE-EpSin to enhance the performance of L- SHADE algorithm. In addition, some scholars have pro- posed adaptive strategies for the population sizeNp. Chen and Zhao[19]et al. proposed population adaptive differen- tial evolution (PADE). Wang and Zhao[20]proposed a dif- ferential evolution (DE) algorithm with self-adaptive pop- ulation resizing mechanism (called SapsDE). Award and Ali[21] et al. proposed ensemble sinusoidal differential evolution with niching-based population reduction (called EsDEr-NR).
In addition to the modification of mutation and control parameters optimization, enhancements in crossover opera- tors have also been investigated. Wang and Huang et al.[22]
Copyright c2019 The Institute of Electronics, Information and Communication Engineers
proposed covariance matrix learning. Cai and Wang[23]
proposed hybrid linkage crossover. Guo et al.[24] pro- posed a crossover operator utilizing eigenvectors of covari- ance matrix. Xu et al.[25] proposed the superior-inferior crossover scheme. Zhu and Lin et al.[26]proposed an adap- tive hybrid crossover operator (AHX). Ghosh and Das[27]
proposed the optional blending crossover scheme. Qiu et al.[28]proposed a multiple exponential recombination.
Some scholars have studied the advantages of var- ious EAs and have proposed hybrid algorithms of DE and other EAs successfully. Li et al.[29] proposed a new hybrid algorithm, called as differential evolution algo- rithm (DE)/artificial bee colony algorithm (ABC). Vaisakh et al.[30] come up with a hybrid approach involving DE and BFOA algorithm. Ponsich and Coello[31]hybridized DE with Tabu Search (TS). Le et al.[32]merged differen- tial evolution and harmony search. Nenavath and Jatoth[33]
proposed a hybrid sine-cosine algorithm with differential evolution algorithm (Hybrid SCA-DE).
To further improve the exploitation and exploration ca- pability of DE algorithm, a novel hybrid dragonfly algo- rithm with differential evolution (Hybrid DA-DE) for solv- ing global optimization problems is proposed. In summary, the main contributions of this paper are as follows.
(1) A novel mutation operator is introduced. In the pro- posed mutation operator, the advantages of dragonfly algo- rithm and differential algorithm are combined to make full use of the exploitation capability of DE and exploration ca- pability of DA.
(2) The scaling factor self-adaption strategy is intro- duced. The proposed scaling factor self-adaption strategy is in a fitness-dependent and individual-dependent way with- out extra parameters.
The organization of this paper is as follows. The basics of DA and DE are briefly introduced in Sect. 2. In Sect. 3, the proposed Hybrid DA-DE algorithm is presented in de- tail. Section 4 deals with the evaluation of proposed algo- rithm using 30 well-known benchmarks with 10 state-of-art DE-based variants and 6 non-DE-based algorithms. Finally, the conclusion is given in Sect. 5, and future work is also described in this section.
2. Dragonfly Algorithm and Differential Evolution Al- gorithm
2.1 Dragonfly Algorithm
Seyedali Mirjalili[34]proposed a novel swarm intelligence optimization technique called Dragonfly algorithm (DA) for solving optimization problems. Two essential phases of optimization, exploration and exploitation are designed by modeling the social interaction of dragonflies in navigating, searching for foods, and avoiding enemies when swarming dynamically or statistically. The subsequent position updat- ing equations are presented for five mathematical models:
Separation: Si=−N
j=1X−Xj (1)
Where X is the position of the current individual, Xj
shows the position j-th neighbouring individual, and N is the number of neighbouring individuals.
Alignment: Ai=
N
j=1Vj
N (2)
WhereVj shows the velocity of j-th neighbouring in- dividual.
Cohesion: Ci=
N
j=1Xj
N −X (3)
WhereXis the position of the current individual,Nis the number of neighbourhoods, and Xjshows the position
j-th neighbouring individual.
Attraction: Fi=X+−X (4)
WhereXis the position of the current individual, and X+shows the position of the food source.
Distraction: Ei=X−−X (5) WhereXis the position of the current individual, and X−shows the position of the enemy.
To update the position of artificial dragonflies in a search space and simulate their movements, two vectors are considered: step (ΔX) and position (X).
ΔXt+1=(sSi+aAi+cCi+f Fi+eEi)+wΔXt (6) where sshows the separation weight, Si indicates the sep- aration of thei-th individual, ais the alignment weight,Ai
is the alignment ofi-th individual,cindicates the cohesion weight,Ciis the cohesion of thei-th individual, fis the food factor,Fiis the food source of thei-th individual,eis the en- emy factor,Eiis the position of enemy of thei-th individual, wis the inertia weight, andtis the iteration counter.
If a dragonfly has at least one neighbouring dragonfly, the position of dragonflies is updated using the following equation:
Xt+1=Xt+ Δt+1 (7)
Wheretis the current iteration.
If there is no neighbouring solution, the position of dragonflies is updated using the following equation:
Xt+1=Xt+Levy(d)×Xt (8) Levy(d)=0.01×r1×σ
|r2|1/β (9)
Wheretis the current generation, anddis the dimen- sion of the position vectors.r1andr2are two random num- bers in [0,1],bis a constant (equal to 1.5 in this paper), and σis calculated as follows. WhereΓ(x)=(x−1)!.
σ=
⎛⎜⎜⎜⎜⎜
⎜⎜⎜⎜⎜
⎜⎜⎜⎜⎝ Γ(1+β)×sin(πβ/2) Γ
1+β 2
×β×2(β−1)/2
⎞⎟⎟⎟⎟⎟
⎟⎟⎟⎟⎟
⎟⎟⎟⎟⎠
1/β
(10)
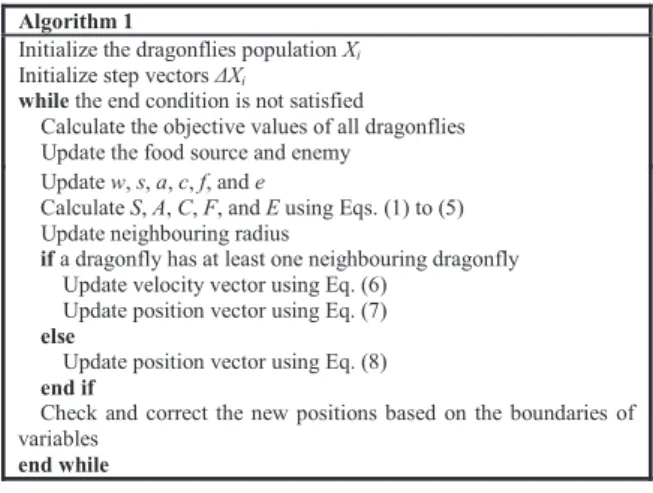
Fig. 1 Pseudo-codes of the DA algorithm
The pseudo-code of the DA algorithm is described in Fig. 1.
2.2 Differential Evolution Algorithm
DE is a population-based evolution algorithm. The algo- rithm basically has the involvement of three basic opera- tions: mutation, crossover and selection. ForD-dimensional minimum optimization problems:
minf(x1,x2. . . ,xD)
s.t xjmin≤xi,j≤xjmax, j=1,2, . . . . ,D (11) Where i = {1,2,· · ·,Np}, Np is the population size, xjmin andxjmaxare respectively the lower bound and upper bound ofxj.
Mutation: It is mainly to generate mutation vector by scaling the difference of different individuals. There are many mutation operators proposed by Storn and Price[35], [36], the typical one is “DE/current-to-best/1”:
Vit=Xit+F·(Xtb−Xit)+F·(Xr1t−Xr2t) (12) Where t indicates the generation, r1 r2 i, Vit is the mutation vector of the i-th target vector Xit, Xbt is the best individual at the current generationt. The scaling factor F controls the amplification of the difference vector and is closely related to convergence speed.
Crossover: By randomly selecting components from the mutant vectorVitand target vectorXti, the trial vector is generated. There are mainly three classic crossover opera- tors[37]: binomial crossover, exponential crossover and ro- tationally invariant arithmetic crossover operators. The fol- lowing binomial crossover operator is the most commonly used.
Uti,j=
Vit,j if randj≤CR or j= jrand
Xit,j otherwise (13) Where randj is a uniformly distributed random vari- able within (0,1). jrand is randomly chosen from the set {1,2,· · ·,D}, which guarantees thatUithas at least one com- ponent fromVit. CRis the crossover probability in (0,1],
which controls the diversity of the population and is closely connected with exploration power.
Selection:A greedy strategy is adopted to perform the selection operation in DE. The superior of the target vector Xti and trial vectorUit will survive in the next generation.
Mathematically, Xti+1=
Uit f(Uit)f(Xit)
Xti others (14)
3. Proposed Hybrid DA-DE Algorithm
3.1 Hybrid Mutation Operator
The novel hybrid mutation operator is introduced in details in this section. The main inspiration of the DA algorithm originates from static and dynamic swarming behaviours.
These two swarming behaviours are very similar to the two main phases of optimization using meta-heuristics: ex- ploration and exploitation. Hybridization in iteration level is a straightforward approach to enhance the optimization performance by iteratively executing two algorithms in se- quence. Here, DA is utilized to converge the search space to more promising areas and then DE is allowed to exploit the previously limited area for searching better solutions.
Therefore, in order to improve the exploitation and explo- ration ability, a novel hybrid dragonfly algorithm with dif- ferential evolution is proposed. The novel hybrid mutation operator is shown in Eq. (15). In terms of time complexity, the basic DE isO(T ∗Np∗D), but Hybrid DA-DE and DA areO(T∗Np∗Np∗D). Here,T is the maximum generation.
Vit=Fti·(Xr1t−Xr2t)+Fti·(DAti−Xr3t) (15) Wheretis the generation counter,r1 r2 r3, they are randomly chosen from the set {1,2,· · ·,Np} \ {i},Fti is the amplification factor,DAtiis thei-th individual after DA algorithm.
3.2 Amplification Factor Self-Adaption
The fitness of each individual indicates the solution quality.
The fitness is larger and better. The amplification factorFtiis self-adaptively and independently adjusted by the difference of f(Xti) and fmaxtfor each individual, which is as shown in Eq. (16). It only uses fitness without extra parameters.
Fti=(fmaxt−f(Xit))/(fmaxt−fmeant
) (16)
Wheref(Xit) is the fitness of thei-th target vector, fmaxt is the optimal fitness at current generationt, and fmeantis the mean fitness.
4. Experiments and Results Analysis
4.1 Benchmark Test Functions
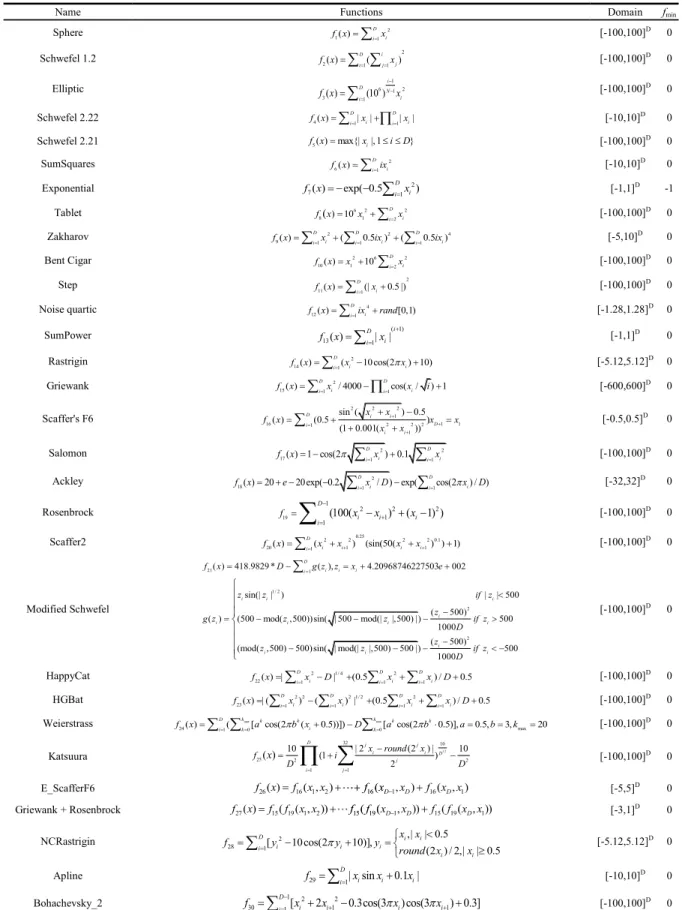
In our experiments, 30 benchmark test functions from the literatures[38]–[40]are used to test the performance of Hy- brid DA-DE. There have different properties: unimodal-
Table 1 Benchmark test functions
Fig. 2 The result of Friedman test with 30 variables over 30 independent runs.
Table 2 The results of Wilcoxon’s rank-sum test over 30 independent runs.
ity, multimodality, non-separation, separation, symmetrisa- tion, non-symmetrisation and quadratic function. In Ta- ble 1, f1-f13are unimodal functions,f13-f30are multimodal functions.
4.2 Sensitivity Analysis to Crossover Probability CR The impact of the control parameterCRon the performance of proposed algorithm is analyzed. In the sensitivity anal- yses, the candidate values for CR are 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9 and 1.0, respectively. We perform Friedman test and Wilcoxon’s rank-sum test[41]among the optimization result on differentCRvalues, respectively. The test results are shown in Fig. 2 and Table 2, respectively.
From Fig. 2, we can observe that the performance of Hybrid DA-DE is best atCR=0.3.
From Table 2, it can be observed that Hybrid DA-DE is not sensitive toCRexcept forCR = 0.1. Based on the trade-offof the convergence precision and convergence rate, we think thatCR=0.7 is a more appropriate value. There- fore, we setCR=0.7 in the following series of experiments unless noted otherwise.
4.3 Sensitivity Analysis to the Population SizeNp
The impact of the population size Np on the performance of hybrid DA-DE is also investigated. Four Hybrid DA-DE
Fig. 3 The result of Friedman test on different population size atD=30.
Table 3 The results of Wilcoxon’s rank-sum test over 30 independent runs.
variants withNp =50,Np =150,Np =200 andNp =250 are compared with the standard Hybrid DA-DE withNp = 100. Non-parametric statistical tests results are shown in Fig. 3 and Table 3, respectively. In Fig. 3, Hybrid DA-DE withNp = 250 is best, Hybrid DA-DE with Np = 50 are worst.
From Table 3, there is no obvious difference in perfor- mance. In conclusion, Hybrid DA-DE is not sensitive to the population sizeNp.
4.4 Comparing Hybrid DA-DE with Sixteen Meta- Heuristic Algorithms
4.4.1 Parameter Settings and Involved Algorithms For rigorous performance verification, Hybrid DA-DE is compared with the following 10 DE-based algorithms (i.e. IMMSADE[5], AGDE[7], EFADE[9], MPEDE[11], EDEV[14], Rank-jDE[15], SHADE[16], Rcr-JADE[17], LSHADE-EpSin[18], EsDEr-NR[21]) and 6 non-DE-based algorithms (i.e. MFO[42], MVO[43], DA[34], ALO[44], WOA[45]and SCA[46]), which are tested on CEC2005, CEC2015 and CEC2017 benchmark functions. Most pa- rameters of compared algorithms are kept the same as used in their original literatures.
The common parameters are set as follows. The max number of iterations is setT =1000, the population size is setNp = 100, 30 independent runs are conducted for each function.
4.4.2 Optimization Results
The optimization performance of DE is evaluated by non-
Fig. 4 The Wilcoxon’s signed-rank test results with a significance level of 0.05 over 30 independent runs. Signs “+”, “-” and “≈” indicate that the performance of Hybrid DA-DE is better than, worse than and similar to the performance of its competitor, respectively. The legend of Fig. 4 (b) and Fig. 5 (a) are same.
Fig. 5 The results of Friedman test and Kruskal Wallis test atD=30 and atD=100 respectively.
parametric statistical tests based on the Mean function er- ror value (f(Xbest)− f(X∗)). Xbest is the best solution ob- tained by algorithms in one run, X∗ is the true global op-
timal solution. Wilcoxon signed-rank test[41]at the 0.05 significance level is conducted for each function, which is summed up in Fig. 4. We also conduct the Friedman test and
Table 4 The results of Wilcoxon rank-sum test over 30 independent runs.
Fig. 6 Number of cases on which each algorithm performs the best in the comparison.
Kruskal Wallis test[41]based on the optimization results to evaluate the overall performance of algorithms, which are respectively shown in Fig. 5 and Table 4.
From Fig. 4, atD=30, Hybrid DA-DE is significantly superior to other 16 competitors sequentially in 19, 25, 20, 19, 20, 19, 20, 21, 21, 20, 27, 24, 30, 25, 15 and 30 func- tions. The comparative results in the reverse direction are only 4, 4, 4, 4, 4, 4, 4, 4, 3, 4, 2, 2, 0, 3, 4 and 0 functions, respectively. It is obviously that the performance superiority of Hybrid DA-DE becomes gradually more significant with the increase of the problems’ dimension. AtD=100, Hy- brid DA-DE is significantly superior to other 16 competitors sequentially in 23, 29, 27, 24, 27, 28, 26, 27, 27, 27, 29, 29, 30, 26, 14 and 30 functions, respectively.
According to Fig. 5, we can draw the following conclu- sions: (1) For low-dimensional and high-dimensional func- tions, Hybrid DA-DE is the best, WOA is the second best, and MFO is the worst. (2) The optimization performance of other algorithms is decreased rapidly with the high dimen- sions, but Hybrid DA-DE still keeps the excellent optimiza- tion performance.
As shown in Table 4, we can observe that Hybrid DA- DE gets higher R+values than R−values for all the com-
pared algorithms, which means that Hybrid DA-DE is out- performs other compared algorithms significantly.
To further show the performance clearly, we summa- rize the number of the best results graphically in Fig. 6.
From the histogram in Fig. 6, for the 30-D dimensions, Hy- brid DA-DE obtains 25 best results, and Hybrid DA-DE has more obvious advantage in 100-D problems.
Based on the above analysis, it is clear that the pro- posed algorithm has a high exploitation ability and high performance in finding the global solution, which demon- strate that Hybrid DA-DE manages to successfully balance the main two objectives of a meta-heuristic algorithm: ex- ploration and exploitation.
4.4.3 Convergence Analysis
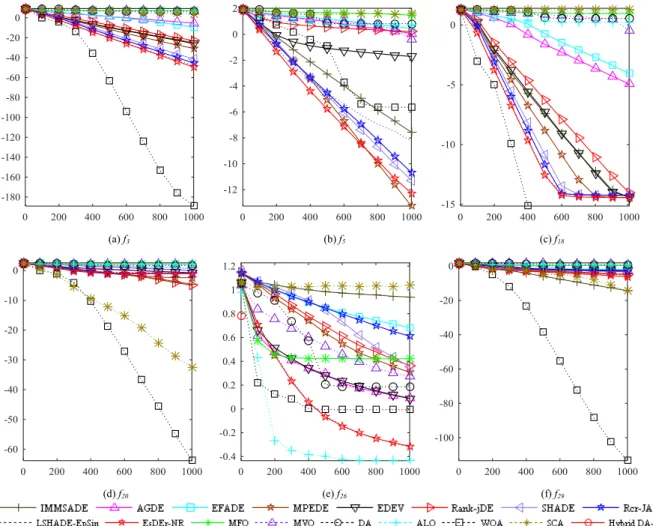
The fitness of the best solution in each generation of Hy- brid DA-DE and other 16 compared algorithms is drawn as the convergence curves in Fig. 7. We choose a part of test functions to perform convergence analysis. As evident from Fig. 7, the proposed Hybrid DA-DE can obtain global opti- mal solution on f3, f5, f18, f20, f26 and f29 in few genera- tions and the convergence speed is the fastest. The conver-
Fig. 7 Comparison between convergence curves of the Hybrid DA-DE and other 16 compared algo- rithms atD=30. The horizontal axis and the vertical axis are generations and the mean function error values over 30 independent runs.
gence curves in Fig. 7 can be divided into two categories.
(1) For f3, f20 and f29, there is no obvious “evolution stag- nation” for all the algorithms, but the performance (i.e. con- vergence precision and speed) of Hybrid DA-DE is superior to 16 competitors significantly. (2) For f5, f18and f26, Hy- brid DA-DE can get the global optimal solution, however, some compared algorithms fall into “evolutionary stagna- tion” on different test functions. For example, SCA, MFO, DA, ALO, SHADE, MPEDE, Rcr-JADE, LSHADE-EpSin and EsDEr-NR have trapped into “evolution stagnation” on
f18.
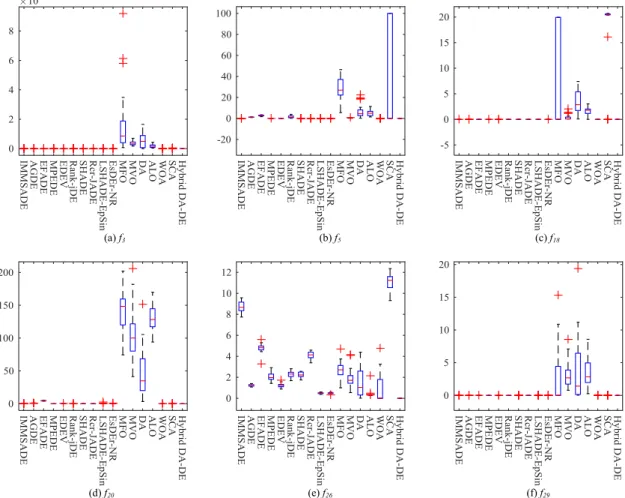
Due to the stochastic nature of the meta-heuristic algorithms, the stability of the proposed algorithm has an- alyzed by using the Box plot analysis. Box plots of the result of solution error are shown in Fig. 8. It can be seen that the Hybrid DA-DE outperformed some of other algo- rithms in terms of stability of solutions. The reason is that the proposed Hybrid DA-DE combined the advantage of DA and DE to realize a better balance of exploration and exploitation.
As evident from Figs. 7–8, the proposed Hybrid DA- DE demonstrates the better performance of convergence precision, convergence speed and robustness than most of
the compared algorithms.
4.5 Adaptability Analysis to High-Dimensional Problems In order to evaluate the adaptability to high-dimensional problems of each algorithm, we conduct Wilcoxon’s signed- rank test[41]results at the 0.05 significance level for each algorithm between its own 30 variables and 100 vari- ables. The test results are shown in Fig. 9. Compar- ing the statistical results, we can obtain the following ob- servations: (1) For AGDE, EFADE, Rank-jDE, SHADE, LSHADE-EpSin and EsDEr-NR, the low-dimensional per- formance is significantly better than high-dimensional per- formance for all the test functions. Therefore, the adapt- ability of AGDE, EFADE, Rank-jDE, SHADE, LSHADE- EpSin and EsDEr-NR is poor. (2) For Hybrid DA-DE, the low dimensional performance is significantly better than, worse than and similar to high dimensional performance in 4, 1 and 25 out of 30 functions, respectively. (3) For WOA, the low-dimensional performance is better than, worse than and similar to high-dimensional performance in 14, 1 and 15 out of 30 functions, respectively. Therefore, Hybrid DA-DE and WOA are respectively the best and the second best for
Fig. 8 Box plots of the result of solution error atD=30 over independent 30 runs.
Fig. 9 The Wilcoxon’s signed-rank test results with a significance level of 0.05 over 30 independent runs. Signs “+”, “-” and “≈” indicate the number of functions that the performance of algorithm for low dimensional problems is better than, worse than and similar to the performance for high dimensional problems, respectively.
the adaptability to high-dimensional problems.
4.6 Discussions on the Comparison Results
A series of experiment comparisons have proved the effec- tiveness (solution quality) of Hybrid DA-DE. The reasons for the superior performance of the proposed hybrid DA-DE algorithm are rationalized as follows:
(1) The DA has the limitation of being restricted to only a certain region, but there is no restriction in DE, which moves from one region to another in search for an optimum solution. In proposed Hybrid DA-DE, it makes full use of exploitation capability of DE and exploration capability of DA to help algorithm jump over the trap of local optimal solution.
(2) In proposed amplification factor self-adaption strat-
egy, the adjustment of scaling factor depends entirely on the individual itself. Therefore, superior individuals tend to be assigned with larger parameter values so as to explore fur- ther areas in the solution space.
5. Conclusions
A novel hybrid mutation operator and the amplification fac- tor self-adaption strategy are proposed in this paper. The performance of proposed algorithm is excellent even ifCR is set to a fixed value. Experiment results show that: (1) Hy- brid DA-DE has the best overall optimization performance among all the compared meta-heuristic algorithms. (2) Hy- brid DA-DE is less sensitive toCRexcept forCR = 0.1.
(3) Hybrid DA-DE is not sensitive to the population size Np. (4) For the high-dimensional functions, with the same- scale population and iterations, Hybrid DA-DE can still ob- tain the excellent global optimization performance, while there is serious performance degradation for other compared algorithms. Meanwhile, Hybrid DA-DE has a more supe- rior performance as the number of dimensions increasing.
In other words, Hybrid DA-DE has the best adaptability to high-dimensional problems.
As a continuation of this research, we will focus on multi-objective optimization (MOO) problems and some ac- tual engineering applications, such as path planning of Un- manned Aerial Vehicle, etc.
Acknowledgements
This work is supported by the National Major Sci- entific Instruments and Equipment Development Project (NO. 2013YQ49087905) and the NSFC and CAAC Joint Conjugal Fund project (NO. U1833115).
References
[1] R. Storn and K. Price, “Differential evolution: A simple and efficient adaptive scheme for global optimization over continuous spaces,”
Tech. Rep., TR-95-012, University of California, Berkeley, Califor- nia, 1995.
[2] F. Arce, E. Zamora, H. Sossa, and R. Barr´on, “Differential evolution training algorithm for dendrite morphological neural networks,” Ap- plied Soft Computing, vol.68, pp.303–313, 2018.
[3] J. Yi, D. Jian, and S. Zhenhong, “Pattern synthesis of MIMO radar based on chaotic differential evolution algorithm,” Optik, vol.140, pp.794–801, 2017.
[4] K.Y. Kok and P. Rajendran, “Differential-evolution control parame- ter optimization for unmanned aerial vehicle path planning,” PLOS ONE, pp.1–12, 2016.
[5] S. Wang, Y. Li, and H. Yang, “Self-adaptive differential evolu- tion algorithm with improved mutation mode,” Applied Intelligence, vol.47, no.3, pp.644–658, 2017.
[6] R. Tang, “Decentralizing and coevolving differential evolution for large-scale global optimization problems,” Appl Intell, vol.47, no.4, pp.1208–1223, 2017.
[7] A.W. Mohamed and A.K. Mohamed, “Adaptive guided differential evolution algorithm with novel mutation for numerical optimiza- tion,” International Journal of Machine Learning and Cybernetics, pp.1–23, 2017.
[8] X. He and Y. Zhou, “Enhancing the performance of differential evo- lution with covariance matrix self-adaptation,” Applied Soft Com- puting, vol.64, pp.227–243, 2018.
[9] A.W. Mohamed and P.N. Suganthan, “Real-parameter unconstrained optimization based on enhanced fitness-adaptive differential evolu- tion algorithm with novel mutation,” Soft Comput, vol.22, no.10, pp.3215–3235, 2018.
[10] S.M. Elsayed, R.A. Sarker, and D.L. Essam, “A self-adaptive com- bined strategies algorithm for constrained optimization using differ- ential evolution,” Applied Mathematics and Computation, vol.241, pp.267–282, 2014.
[11] G. Wu, R. Mallipeddi, P.N. Suganthan, R. Wang, and H. Chen, “Dif- ferential evolution with multi-population based ensemble of muta- tion strategies,” Information Sciences, vol.329, pp.329–345, 2016.
[12] M.-F. Yeh, H.-C. Lu, T.-H. Chen, and M.-S. Leu, “Modified Gaussian barebones differential evolution with hybrid crossover strategy,” Proc. 2016 International Conference on Machine Learn- ing and Cybernetics, pp.7–12, 2017.
[13] L. Cui, G. Li, Z. Zhu, Q. Lin, K.-C. Wong, J. Chen, N. Lu, and J. Lu,
“Adaptive multiple-elites-guided composite differential evolution algorithm with a shift mechanism,” Information Sciences, vol.422, pp.122–142, 2018.
[14] G. Wu, X. Shen, H. Li, H. Chen, A. Lin, and P.N. Suganthan,
“Ensemble of differential evolution variants,” Information Sciences, vol.423, pp.172–186, 2018.
[15] W. Gong and Z. Cai, “Differential Evolution With Rank- ing-Based Mutation Operators,” IEEE Trans. Cybern., vol.43, no.6, pp.2066–2081, 2013.
[16] R. Tanabe and A. Fukunaga, “Success-History Based Parameter Adaptation for Differential Evolution,” IEEE Congress on Evolu- tionary Computation, (CEC), pp.71–78, 2013.
[17] W. Gong, Z. Cai, and Y. Wang, “Repairing the crossover rate in adaptive differential evolution,” Applied Soft Computing, vol.15, pp.149–168, 2014.
[18] N.H. Awad, M.Z. Ali, P.N. Suganthan, and R.G. Reynolds,
“An ensemble sinusoidal parameter adaptation incorporated with L-SHADE for solving CEC2014 benchmark problems,” Proc. IEEE Congress on Evolutionary Computation, pp.2958–2965, 2016.
[19] L. Chen, S. Zhao, W. Zhu, Y. Liu, and W. Zhang, “A self-Adap- tive differential evolution algorithm for parameters identification of stochastic genetic regulatory networks with random delays,” Ara- bian Journal for Science and Engineering, vol.39, no.2, pp.821–835, 2014.
[20] X. Wang and S. Zhao, “Differential evolution algorithm with self- adaptive population resizing mechanism,” Mathematical Problems in Engineering, 419372, 2013.
[21] N.H. Awad, M.Z. Ali, and P.N. Suganthan, “Ensemble of param- eters in a sinusoidal differential evolution with niching-based pop- ulation reduction,” Swarm and Evolutionary Computation, vol.39, pp.141–156, 2018.
[22] Y. Wang, H.-X. Li, T. Huang, and L. Li, “Differential evolution based on covariance matrix learning and bimodal distribution pa- rameter setting,” Appl. Soft Comput., vol.18, pp.232–247, 2014.
[23] Y.Q. Cai and J.H. Wang, “Differential evolution with hybrid linkage crossover,” Inf. Sci, vol.320, pp.244–287, 2015.
[24] S.-M. Guo and C.-C. Yang, “Enhancing Differential Evolution Uti- lizing Eigenvector-Based Crossover Operator,” IEEE Trans. Evol.
Comput., vol.19, no.1, pp.31–49, 2015.
[25] Y. Xu, J.-A. Fang, W. Zhu, X. Wang, and L. Zhao, “Differential evo- lution using a superior-inferior crossover scheme,” Comput Optim Appl., vol.61, no.1, pp.243–274, 2015.
[26] Q. Zhu, Q. Lin, Z. Du, Z. Liang, W. Wang, Z. Zhu, J. Chen, P.
Huang, and Z. Ming, “A novel adaptive hybrid crossover operator for multiobjective evolutionary algorithm,” Information Sciences, vol.345, pp.177–198, 2016.
[27] A. Ghosh, S. Das, S.S. Mullick, R. Mallipeddi, and A.K. Das,
“A switched parameter differential evolution with optional blending
crossover for scalable numerical optimization,” Applied Soft Com- puting, vol.57, pp.329–352, 2017.
[28] X. Qiu, K.C. Tan, and J.-X. Xu, “Multiple Exponential Recombina- tion for Differential Evolution,” IEEE Trans. Cybern., vol.47, no.4, pp.995–1005, 2017.
[29] X. Li and M. Yin, “Hybrid differential evolution with artificial bee colony and its application for design of a reconfigurable antenna ar- ray with discrete phase shifters,” Iet Microwaves Antennas & Prop- agation, vol.6, no.6, pp.1573–1582, 2012.
[30] K. Vaisakh, P. Praveena, and K.N. Sujatah, “Differential evolution and bacterial foraging optimization based dynamic economic dis- patch with non-smooth fuel cost functions,” Swarm, Evolutionary, and Memetic Computing, pp.583–594, 2013.
[31] A. Ponsich and C.A.C. Coello, “A hybrid differential evolution-Tabu search algorithm for the solution of job-shop scheduling problems,”
Applied Soft Computing, vol.13, no.1, pp.462–474, 2013.
[32] D.L. Le, N.D. Vo, T.H. Nguyen, and A.D. Le, “A hybrid differen- tial evolution and harmony search for non-convex economic dispatch problems,” IEEE Conference on Power Engineering and Optimiza- tion, pp.238–243, 2013.
[33] H. Nenavath and R.K. Jatoth, “Hybridizing sine cosine algorithm with differential evolution for global optimization and object track- ing,” Applied Soft Computing, vol.62, pp.1049–1043, 2018.
[34] S. Mirjalili, “Dragonfly algorithm: A new meta-heuristic op- timization technique for solving single-objective, discrete, and multi-objective problems,” Neural Comput. Applic., vol.27, no.2, pp.1053–1073, 2016.
[35] K. Price, R. Storn, and J. Lampinen, Differential Evolution: A Prac- tical Approach to Global Optimization, Springer-VerlagR, Berlin, Germany, 2005.
[36] R. Storn and K. Price, “Differential evolution,” Int. Comput., Sci.
Inst., Berkeley, CA, USA, 2010.
[37] S. Das, A. Abraham, U.K. Chakraborty, and A. Konar, “Differen- tial evolution using a neighborhood-based mutation operator,” IEEE Trans. Evol. Comput., vol.13, no.3, pp.526–553, 2009.
[38] P.N. Suganthan, N. Hansen, J.J. Liang, K. Deb, Y.-P. Chen, A.
Auger, and S. Tiwari, “Problem definitions and evaluation criteria for the CEC 2005 Special Session on Real-Parameter Optimization,”
report no.2005005, 2005.
[39] J.J. Liang, B.Y. Qu, P.N. Suganthan, and Q. Chen, “Problem def- inition and evaluation criteria for the CEC 2015 competition on learning-based real-parameter single objective optimization,” report no.201411B, 2015.
[40] N.H. Awad, M.Z. Ali, P.N. Suganthan, J.J. Liang, and B.Y. Qu,
“Problem definitions and evaluation criteria for the CEC 2017 Spe- cial Session and Competition on Single Objective Real-Parameter Numerical Optimization,” 2016.
[41] J. Derrac, S. Garc´ıa, D. Molina, and F. Herrera, “A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms,” Swarm Evolutionary Computation, vol.1, no.1, pp.3–18, 2011.
[42] S. Mirjalili, “Moth-flame optimization algorithm: A novel nature-in- spired heuristic paradigm,” Knowledge-Based Systems, vol.89, pp.228–249, 2015.
[43] S. Mirjalili, S.M. Mirjalili, and A. Hatamlou, “Multi-verse opti- mizer: A nature-inspired algorithm for global optimization,” Neural Comput. Appli., vol.27, no.2, pp.495–513, 2016.
[44] S. Mirjalili, “The Ant Lion Optimizer,” Advances in Engineering Software, vol.83, pp.80–98, 2015.
[45] S. Mirjalili and A. Lewis, “The Whale Optimization Algorithm,”
Advances in Engineering Software, vol.95, pp.51–67, 2016.
[46] S. Mirjalili, “SCA: A sine cosine algorithm for solving optimization problems,” Knowledge-Based Systems, vol.000, pp.1–14, 2016.
Mei Jun Duan received M.S. degree in electrical system control and information tech- nology from Southwest Jiaotong University in 2012. She has been worked toward the Ph.D.
degree in the National Key Lab. of Fundamental Science on Synthetic Vision, Sichuan University since 2016. Her current research interests in- clude evolutionary algorithms, intelligence opti- mization and global optimization.
Hong Yu Yang is a professor and Ph.D. su- pervisor at National Key Lab. of Fundamental Science on Synthetic Vision, Sichuan Univer- sity. Her research interests include intelligence optimization, air traffic management and image processing.
Bo Yang is an associate professor at Col- lege of Computer Science, Sichuan University.
His research interests include intelligence op- timization, air traffic management and image processing.
Xi Ping Wu has been worked toward the post-doctoral in the National Key Lab. of Fun- damental Science on Synthetic Vision, Sichuan University since 2018. Her current research in- terests include intelligence optimization and air traffic management.
Hai Jun Liang is an associate professor at College of air traffic management, Civil Avi- ation Flight University of China. His research interests include intelligence optimization, air traffic management.