円柱導体による散乱現象を用いた同相写像FDTD法の 検証
著者 宮田 尚起, 葛西 陽介
雑誌名 東京都立産業技術高等専門学校研究紀要
巻 11
ページ 45‑58
発行年 2017‑03
URL http://id.nii.ac.jp/1282/00000209/
Creative Commons : 表示 ‑ 非営利 ‑ 改変禁止 http://creativecommons.org/licenses/by‑nc‑nd/3.0/deed.ja
円柱導体による散乱現象を用いた同相写像 FDTD 法の検証
A Verificatio of Homeomorphic FDTD through EM Field Scattered by a Conducting Cylinder
宮田 尚起1)
, 葛西 陽介2)
Naoki Miyata, Yosuke Kasai
Abstract: In this paper, we proposed a Homeomorphic-Finite-Difference-Time-Domain(Hom-FDTD) method which promote proving a direct relation between electromagnetic phenomena and geometry. That relation is fundamental in developing radio/optical devices such as filter or metameterials. The proposed Hom-FDTD method is one of FDTD methods in curvilinear coordinates, particularly, a mapping used in the Hom-FDTD has one-to-one, continuous and topol- ogy preserving property. Hence the method is not restricted by problems of coordinate singular points. And by evaluating a mapping, a geometry of model becomes mathematically clear. To verify the character of the method, experimentally an electromagnetic scattering from a perfectly conducting cylinder is discussed through comparative experiment with two other ordinary method in viewpoint of spacial and temporal observation. At this experiment, in the method, the cylinder is modeled by homeomorphism from square cylinder. One of way to determine the homeomorphism is also proposed. As a consequence, analysis with the method shows suitable characteristics, and modeling using the method is as accurate as those using polar coordinate, we confirmed
Keywords: metamaterial, FDTD analysis, mapping, homeomorphism
1 はじめに
電磁気現象を用いた様々なデバイスは,ある決まった 形状をした構造物であり,これらデバイスの設計は所定 の電磁気的性質を実現するための構造物の形状を決定す ることに帰する.例として分割リング共振器
(Split Ring Resonator; SRR)[1]
,[2]
があり,SRR
は共振周波数近傍 で負の実効透磁率を実現するデバイスとしてメタマテリ アル[3]
の構成要素に用いられる.分割リング共振器は 典型的にはリング状の共振器であるが,Rose Curve
と呼 ばれる形状のSRR[4]
も存在し,Rose Curve
の形状を決 めるパラメータごとに異なる周波数-
実効透磁率特性が得 られる.以上は一例であるが,これより構造物の電磁気 現象と構造物の形状との間に対応をつけられると考えら れる.したがって,無線通信機器に不可欠なフィルタ・ア ンテナや,無線技術および光学技術の開発に高いポテン シャルを持つメタマテリアルの設計を直観的かつ簡便に するため,構造物の電磁気的性質(e.g. S
パラメータの周 波数特性)
を構造物の形状によって直接記述することが 求められており,本研究では特にSRR
の形状による共振 周波数および実効透磁率の変化を調べることを目的とす る.この問題に対するアプローチとして,解析において モデルの連続変形を容易に実現し,かつ,モデルの形状1)東京都立産業技術高等専門学校ものづくり工学科
2)新潟大学理学部数学科
の数学的な評価に適した解析法が必要である.我々はそ のような解析法として,同相写像
FDTD(Homeomorphic Finite Time Difference Time Domain; Hom-FDTD)
法を提 案する.同相写像とは,集合間に定義される全単射の連 続写像であって,集合の位相的性質を保存するものをい う.例えば,集合A
と集合B
の位相を開集合によって定 めるとき,集合A
の開集合は同相写像f : A −→ B
で集 合B
へうつされても集合B
の開集合となる.直観的に は,領域A
から領域B
への写像であって,領域A
の形状 に対する連続変形で領域B
の形状を構成できるような写 像は同相写像である.さらに,2
つの領域の間に同相写 像が存在する場合,それらの領域は同相であるという.提案手法である
Hom-FDTD
法は,モデリングした構造 物を同相写像によって別な形状の構造物へ写像し,写像 後の構造物についてFDTD
解析をする方法である.Hom-
FDTD
法による解析をすることで,解析のたびにモデル の形状を変えることが不要となる.また,写像前のモデ ルを計算機で扱いやすい長方形とすれば,写像後のモデ ルには階段近似が含まれない.なお,曲面に対する高精 度なFDTD
解析については[5]-[9]
などで多く研究され ている.特に,高い精度でモデリングができるFDTD
法 としてContour-Path FDTD
法[5]
やConformal FDTD
法[6]
などが提案されているが,これらはモデルに合わせて グリッドを変形する方法であるため,モデルの形状を数学的に扱う上で不適である.これに対して
Hom-FDTD
法では,写像前のモデルの形状を固定すれば,写像後の 構造物,すなわち解析対象の構造物の形状は同相写像そ のものとして評価できるため,“
構造物の形”
なる概念 の数学的実体が明瞭となる.さらに,写像を記述する方 程式系に含まれるパラメータを連続的に変化させること で,写像後の構造物の形状を連続的に変えることができ る.以上よりHom-FDTD
法は,モデルの形状ごとの解 析結果を機械的に蓄積しつつ,直交グリッドに起因する 階段近似が伴う通常のFDTD
解析よりも高精度なモデ リングが実現できる解析法として,上述した我々の問題 を解決する良い手段となることが期待される.Hom-FDTD
法は曲線座標を用いたFDTD
法[9]
の一 種であるが,曲線座標として広く用いられる座標には極 座標があり,極座標は円形の構造物を解析する際に有用 である.しかし,物理学および工学において実用的な曲 線座標の多くは特異点を持ち,極座標も座標原点に特異 点を持つ.特異点はタイムステップの問題から解析領域 に含めることができないため,特異点を持つ座標によるFDTD
解析では解析できるモデルの形状が制限される.したがって,極座標による
FDTD
法では円柱は精度よく 解析できるが,リング状の構造物は直接解析できない.この問題は,長方形のリングを円形のリングへうつすよ うな同相写像による
Hom-FDTD
解析で解決される.Hom-FDTD
法の実用化に向けて,本論文ではHom- FDTD
法による解析の実例を示すことを目的とし,次の3
点について報告する:(1)
同相写像を決定する一手法;(2)
正方形を円にうつす同相写像の定式化;(3)
決定した 同相写像によるHom-FDTD
法の有効性.(3)
について は,完全導体の無限長円柱による散乱で生じた電磁界分 布を,Hom-FDTD
法と極座標によるFDTD
法,直交グ リッドによる通常のFDTD
法の3
つの方法ごとに計算 し,計算結果を比較することで検証した.本論文における説明のため,表
1
のように記号を定義 し,定義した記号は本論文を通して使用する.なお,写 像を表す文字には,本論文で報告するFDTD
解析で用い た写像に限って大文字を用いる.2 Hom-FDTD 法の基本原理
2.1 FDTD
法本研究の目的を達成するためには,構造物の形状がそ の電磁気的性質に及ぼす影響を調べることが重要とな る.そのために,異なる形状の構造物モデルを複数用意 し,同一の条件で観測した電磁気現象を構造物モデルの 形状ごとに比較することによって,構造物の形状とその
表
1:
本論文を通して使用する記号の一覧 記号 意味a ∈ A a
はA
の要素A ⊆ B A
はB
の部分集合A ∪ B A
とB
の和集合A ∩ B A
とB
の共通部分A − B A
からB
の要素を差し引いた集合A × B A
とB
の直積{ a } a
ただ1
つを要素にもつ集合N
自然数全体Z
整数全体R
実数全体R
+R
+= { x ∈ R | 0 ≤ x } (x
1, ··· , x
n) Physical Space
の任意の点(u
1, ··· , u
n) Virtual Space
の任意の点ξ
1, ξ
2rectilinear
座標r , θ
極座標f
p 極座標への座標変換F
rrectilinear
座標への座標変換F
p 適当に制限された極座標への座標変換F
h 本論文で示すHom-FDTD
法による解析で用いる同相写像
dom( f )
写像f
の定義域電磁気的性質との関係を調べることが必要となる.そこ で我々は構造物モデルの変形に座標変換を用いることが 有効であることを見出し,
FDTD
法は座標変換を用いた 解析に特に適した解析法である.FDTD
法のアルゴリズムは,電磁気現象の支配方程式 であるMaxwell
の方程式のうち,電磁界の回転を記述 する方程式∇ ×EEE = − µ ∂ H H H
∂ t (1)
∇ × H H H = ε ∂ EEE
∂ t + σ EEE (2)
を差分化することで構成される.
Hom-FDTD
法は曲線座 標によるFDTD
法の一種であり,曲線座標によるFDTD
法の場合は曲線座標で記述されたMaxwell
の方程式[9]
ε∂Eλ
∂t +σEλ=
√gλλ g
(∂H˜λ−1
∂uλ+1−∂H˜λ+1
∂uλ−1 )
, H˜λ= Hλ
√gλ λ
(3)
−µ∂Hλ
∂t −σ∗Hλ=
√gλλ
g
(∂E˜λ−1
∂uλ+1−∂E˜λ+1
∂uλ−1 )
, E˜λ= Eλ
√gλ λ
(4)
Ei=
∑
3k=1GikEk
(5)
Hi=
∑
3k=1GikHk
(6)
Gik=
√gkk
giigik
(7)
学的に扱う上で不適である.これに対して
Hom-FDTD
法では,写像前のモデルの形状を固定すれば,写像後の 構造物,すなわち解析対象の構造物の形状は同相写像そ のものとして評価できるため,“
構造物の形”
なる概念 の数学的実体が明瞭となる.さらに,写像を記述する方 程式系に含まれるパラメータを連続的に変化させること で,写像後の構造物の形状を連続的に変えることができ る.以上よりHom-FDTD
法は,モデルの形状ごとの解 析結果を機械的に蓄積しつつ,直交グリッドに起因する 階段近似が伴う通常のFDTD
解析よりも高精度なモデ リングが実現できる解析法として,上述した我々の問題 を解決する良い手段となることが期待される.Hom-FDTD
法は曲線座標を用いたFDTD
法[9]
の一 種であるが,曲線座標として広く用いられる座標には極 座標があり,極座標は円形の構造物を解析する際に有用 である.しかし,物理学および工学において実用的な曲 線座標の多くは特異点を持ち,極座標も座標原点に特異 点を持つ.特異点はタイムステップの問題から解析領域 に含めることができないため,特異点を持つ座標によるFDTD
解析では解析できるモデルの形状が制限される.したがって,極座標による
FDTD
法では円柱は精度よく 解析できるが,リング状の構造物は直接解析できない.この問題は,長方形のリングを円形のリングへうつすよ うな同相写像による
Hom-FDTD
解析で解決される.Hom-FDTD
法の実用化に向けて,本論文ではHom- FDTD
法による解析の実例を示すことを目的とし,次の3
点について報告する:(1)
同相写像を決定する一手法;(2)
正方形を円にうつす同相写像の定式化;(3)
決定した 同相写像によるHom-FDTD
法の有効性.(3)
について は,完全導体の無限長円柱による散乱で生じた電磁界分 布を,Hom-FDTD
法と極座標によるFDTD
法,直交グ リッドによる通常のFDTD
法の3
つの方法ごとに計算 し,計算結果を比較することで検証した.本論文における説明のため,表
1
のように記号を定義 し,定義した記号は本論文を通して使用する.なお,写 像を表す文字には,本論文で報告するFDTD
解析で用い た写像に限って大文字を用いる.2 Hom-FDTD 法の基本原理
2.1 FDTD
法本研究の目的を達成するためには,構造物の形状がそ の電磁気的性質に及ぼす影響を調べることが重要とな る.そのために,異なる形状の構造物モデルを複数用意 し,同一の条件で観測した電磁気現象を構造物モデルの 形状ごとに比較することによって,構造物の形状とその
表
1:
本論文を通して使用する記号の一覧 記号 意味a ∈ A a
はA
の要素A ⊆ B A
はB
の部分集合A ∪ B A
とB
の和集合A ∩ B A
とB
の共通部分A − B A
からB
の要素を差し引いた集合A × B A
とB
の直積{ a } a
ただ1
つを要素にもつ集合N
自然数全体Z
整数全体R
実数全体R
+R
+= { x ∈ R | 0 ≤ x } (x
1, ··· , x
n) Physical Space
の任意の点(u
1, ··· , u
n) Virtual Space
の任意の点ξ
1, ξ
2rectilinear
座標r, θ
極座標f
p 極座標への座標変換F
rrectilinear
座標への座標変換F
p 適当に制限された極座標への座標変換F
h 本論文で示すHom-FDTD
法による解析で用いる同相写像
dom( f )
写像f
の定義域電磁気的性質との関係を調べることが必要となる.そこ で我々は構造物モデルの変形に座標変換を用いることが 有効であることを見出し,
FDTD
法は座標変換を用いた 解析に特に適した解析法である.FDTD
法のアルゴリズムは,電磁気現象の支配方程式 であるMaxwell
の方程式のうち,電磁界の回転を記述 する方程式∇ × EEE = − µ ∂ H H H
∂ t (1)
∇ × H H H = ε ∂ EEE
∂ t + σ EEE (2)
を差分化することで構成される.
Hom-FDTD
法は曲線座 標によるFDTD
法の一種であり,曲線座標によるFDTD
法の場合は曲線座標で記述されたMaxwell
の方程式[9]
ε∂Eλ
∂t +σEλ=
√gλλ g
(∂H˜λ−1
∂uλ+1−∂H˜λ+1
∂uλ−1 )
, H˜λ= Hλ
√gλ λ
(3)
−µ∂Hλ
∂t −σ∗Hλ=
√gλλ
g
(∂E˜λ−1
∂uλ+1−∂E˜λ+1
∂uλ−1 )
, E˜λ= Eλ
√gλ λ
(4)
Ei=
∑
3k=1GikEk
(5)
Hi=
∑
3k=1GikHk
(6)
Gik=
√gkk
giigik
(7)
を差分化することで計算アルゴリズムを構成する.ただ し,
λ
は{ 1,2, 3 }
の値をサイクリックにとり,例としてλ = 1
ならばλ − 1 = 3, λ + 1 = 2
である.また,Eλ お よびH
λ は電界および磁界の反変成分,EλおよびH
λ は 電界および磁界の共変成分であり,[g
ik]
は計量テンソル である.[g
ik]
は[g
ik] =
g
11g
12g
13g
21g
22g
23g
31g
32g
33
=
eee
1· eee
1eee
1· eee
1eee
1· eee
3eee
2· eee
1eee
2· eee
1eee
2· eee
3eee
3· eee
1eee
3· eee
1eee
3· eee
3
, (8)
eee
i= ° x
1° u
i° x
2° u
i° x
3° u
i(9)
で表され,
[g
ik] = [g
ik]
−1,g= det([g
ik])
である.2.2 Physical Space
およびVirtual Space
一般に座標変換とは,変形と直接関係しない概念で ある.しかしながら,ここで説明する
Physical Space
とVirtual Space
なる2
つの空間を考えることで,領域の仮想的な変形を考えられる.
座標変換は,
R
nの部分集合で定義され,R
nに値を持 つ写像である.この際,両空間は物理的意味において 区別できる.すなわち,我々が直接観測できるPhysical Space
と,Physical Space
に属する点の座標(x
1, ··· ,x
n)
の 測り方を与えるパラメータu
1, ··· , u
nを軸にとったVirtual Space
とに区別できる.Physical Space
とVirtual Space
に ついて,極座標r, θ
による例を与える.2
次元のPhysical Space
に属する任意の1
点(x
1, x
2)
を極座標r, θ
による 表示へ変換する写像f
pは,f
p: R
+× R (r, θ ) −→ (r cos( θ ),r sin( θ )) ∈ R
2(10)
と定まる.いま,Physical Spaceにおける領域
D
を次の ように与える:D =
(x
1, x
2)
(x
1)
2+ (x
2)
2≤ R
= { (rcos(θ ),rsin(θ)) | 0 ≤ r ≤ R
∧θ ∈ R }
=
f
p(r, θ ) | 0 ≤ r ≤ R
∧θ ∈ R
= f
p(D
),
(11)
D
= { (r, θ) | 0 ≤ r ≤ R
∧θ ∈ R } . (12) D
は,Physical Spaceにおける半径R
かつ原点中心の円 盤である.一方で,Dに対応するVirtual Space
の領域D
は,θ
方向に無限の長さを持ち,r方向にR
の幅を持つ 長方形である.D
およびD
を図1
に示す.図1
より,D
は座標変換f
pによってD
へ仮想的に変形したと考える ことができる.しかしながらこの性質は,ある構造物を,計算機上でより扱いやすい形状の構造物としてモデリン グできることを意味する.曲線座標による
FDTD
法はこ の性質を利用した解析法であって,言い換えればFDTD
解析を
Virtual Space
で行うものである.また,PhysicalSpace
とVirtual Space
では異なる物理法則に支配され る.極座標の例では,一様な媒質で充填されたPhysical Space
で1点を励振して生じる波紋はPhysical Space
で は円形であるが,Virtual Spaceではθ
軸に平行な直線と なる.(D) (D
)
図
1:
座標変換による領域の形状の変化の例(極座標)
2.3
座標曲線と領域の変形(x
1, x
2) = f (u
1,u
2)
なる関係があるとき,1つのパラ メータu
iを固定し,他方のパラメータu
kを動かした際 に(x
1, x
2)
の定める1
点の軌跡は1
次元の空間,すなわ ち曲線をなす.このような曲線を座標曲線とよぶ.座標 曲線を定義するため,まずVirtual Space
において1
つ のパラメータを動かして得られる直線を定義する.i = 1, 2
に対してI
iをR
の部分集合とし,座標変換f : I
1× I
2−→ R
2が与えられているとする.dom(f ) = I
1× I
2⊆ R
2で,dom( f )
はf
の定義域である.また,A
1お よびA
2をそれぞれI
1およびI
2の部分集合とし,dom( f )
においてi
番目の軸に平行な方向をu
i方向とよぶ.いま,dom( f )
のある1
点a := (a
1, a
2)
をA
iの中にわたって動 かせば,点a
の軌跡はu
i方向に伸びる直線となる.し たがって,i = 1, 2
に対してC
i( f ; A
1,A
2)
を,dom( f )
に おける領域A
1× A
2に描かれたu
i方向の直線として次の ように定義する:C
1( f ;A
1,A
2) := { A
1× { a } | a ∈ A
2} ,
C
2( f ;A
1,A
2) := { { a } × A
2| a ∈ A
1} . (13) i = 1, 2
に対し,C
i( f ; I
1,I
2)
は単にC
i( f )
と書く.また,C
1( f ;A
1, A
2)
の各要素は,dom( f ) = I
1× I
2に含まれる領 域A
1× A
2において2
個のパラメータu
1, u
2のうち2
番 目のパラメータu
2を一定値に固定し,u
1をA
1の中で 動かして得られる軌跡であり,C
2( f ; A
1,A
2)
の要素も同 様である.さらに,C ( f ; A
1, A
2)
をC ( f ;A
1,A
2) := C
1( f ;A
1,A
2) ∪ C
2( f; A
1, A
2) (14)
と定義すれば,この集合は
A
1× A
2の中で描かれる直線 の全体となる.例としてg : R
+× Z −→ R
2とし,A1= [1,3], A
2= { 1, 2,3, 4 }
とすれば,C (g; A
1, A
2)
の全要素は 図2
のように描かれる.図2
に示されているように,Ii がR
の区間ならばC
i( f ; I
1, I
2)
の各要素はVirtual Space
における連続した直線を描くが,Iiが有限(または可算)
集合ならばC
i( f ; I
1,I
2)
の各要素はVirtual Space
の直線 上に並んだ離散的な点の集まりとなる.しかし,このよ うな離散的な点の並びも,本論文では広義の直線と考 える.f : I
1× I
2−→ R
2,Ai⊆ I
i(i = 1,2)
とするとき,f(C1)(A1,A2):={f(A1× {a})|a∈A2}
={ {f(x,y)|x∈A1} |y∈A2}, f(C2)(A1,A2):={f({a} ×A2)|a∈A1}
={ {f(x,y)|y∈A2} |x∈A1}
(15)
と定義された集合
f (C
1)(A
1, A
2)
の各要素は,dom(f )
に含まれる領域A
1× A
2の中で点(a
1, a
2)
をu
1方向に 動かしたときに点f (a
1, a
2)
がR
2に描く軌跡である.f (C
2)(A
1,A
2)
についても同様である.このような軌跡はf
によるu
i方向の座標曲線であり,以降ではf : I
1× I
2−→
R
2であるときにf (C
i)(I
1, I
2)
の各要素を単に,座標変換f
におけるu
i方向の座標曲線とよぶ.また,f(C )(A
1,A
2) := f(C
1)(A
1, A
2) ∪ f (C
2)(A
1,A
2) (16)
なる集合は,座標変換
f : I
1× I
2−→ R
2 をA
1× A
2 に制限した場合にR
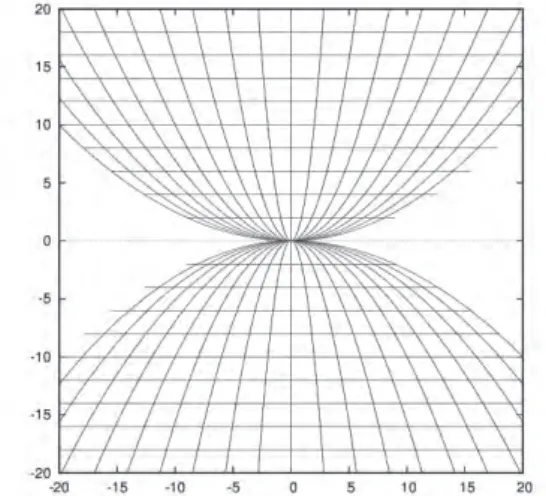
2 に描かれる座標曲線の全体で ある.例として,A1= { 0,R
1, R
2, ··· , R
6} ⊆ R
+,A2= { 0, Θ
1, Θ
2, ··· , Θ
5} ⊆ R
なる集合を与える.このとき,f
p(C )(A
1, A
2)
およびC ( f
p; A
1, A
2)
の各要素は図3
およ び図4
のようにプロットされる.図3
および図4
には 座標曲線とともに領域D
1, D
2, D
1, D
2が示されており,D
i= f
p(D
i) (i = 1, 2)
である.図4
に示されたD
1およ びD
2は,いずれもC ( f
p; A
1,A
2)
の要素である直線がな す交点を頂点とし,各頂点をr
およびθ
方向の直線で結 んで得られる長方形である.このような長方形は,Vir-tual Space
におけるセルに他ならない.ただし,この例では
A
1およびA
2が有限集合であることによってVirtual
Space
は離散的なので,D1およびD
2なる長方形の辺をなすような連続的な直線は
C ( f
p; A
1,A
2)
に含まれず,D
1 およびD
2はVirtual Space
に含まれない.しかしながら,前述のように,直線状の離散的な点の並びも広義の直線 と考えることで,頂点の集合自体をセルと考えられる.
よって本論文では,座標変換
f : I
1× I
2−→ R
2(I
1, I
2⊆ R )
と任意のA
i⊆ I
i(i = 1,2)
に対し,次なる集合の要素をVirtual Space
におけるセルとして扱う:Cell(f;A1,A2) :=
(u1,v1)×(u2,v2) u
i,vi∈Ai (i=1,2),
ui<vi(i=1,2)
.
(17)
このとき,
f(Cell)(A1,A2)
=
(f(u1),f(v1))×(f(u2),f(v2)) u
i,vi∈Ai (i=1,2), ui<vi(i=1,2)
.
(18)
は
Physical Space
におけるセルの全体となる.以上に定義した座標曲線によって,
f : I
1× I
2−→ R
2,A
i⊆ I
i(i = 1,2)
とするとき,集合としての定義が与えら れていなかったPhysical Space
およびVirtual Space
が式(19)
および式(21)
のように表せる:(Virtual Space)
= { l
1∩ l
2| l
i∈ C
i( f ;A
1,A
2) (i = 1,2) } , (19) (Physical Space)
= { f (x) | x ∈ (Virtual Space) } (20)
すなわち,Virtual Spaceはdom( f )
に存在する直線l
1∈ C
1( f ; A
1, A
2)
と直線l
2∈ C
1( f ; A
1, A
2)
の交点の全体で,Physical Space
は座標曲線の交点の全体に等しい.なお,特に
f
が一対一の対応の場合,Physical Space
について(Physical Space)
= { f (l
1) ∩ f (l
2) | l
i∈ C
i( f; A
1, A
2) (i = 1,2) } (21)
が成り立つ.(0,0) u2
u1
1 2 3 4
1 2 3 4
: elements of C 2(g; A1, A2) : elements of C 1(g; A1, A2)
図
2: C (g; A
1, A
2)
の各要素2.4
同相の概念と特異点座標変換
f : I
1× I
2−→ R
2(I
1, I
2⊆ R )
と任意のA
i⊆
I
i(i = 1,2)
に対して次の条件が成り立つとき,f
は同相 写像としての性質を持つ:と定義すれば,この集合は
A
1× A
2の中で描かれる直線 の全体となる.例としてg : R
+× Z −→ R
2とし,A1= [1, 3], A
2= { 1, 2,3, 4 }
とすれば,C (g; A
1, A
2)
の全要素は 図2
のように描かれる.図2
に示されているように,Ii がR
の区間ならばC
i( f ;I
1, I
2)
の各要素はVirtual Space
における連続した直線を描くが,Iiが有限(または可算)
集合ならばC
i( f ; I
1,I
2)
の各要素はVirtual Space
の直線 上に並んだ離散的な点の集まりとなる.しかし,このよ うな離散的な点の並びも,本論文では広義の直線と考 える.f : I
1× I
2−→ R
2,Ai⊆ I
i(i = 1,2)
とするとき,f(C1)(A1,A2):={f(A1× {a})|a∈A2}
={ {f(x,y)|x∈A1} |y∈A2}, f(C2)(A1,A2):={f({a} ×A2)|a∈A1}
={ {f(x,y)|y∈A2} |x∈A1}
(15)
と定義された集合
f (C
1)(A
1, A
2)
の各要素は,dom(f )
に含まれる領域A
1× A
2の中で点(a
1, a
2)
をu
1方向に 動かしたときに点f (a
1, a
2)
がR
2 に描く軌跡である.f (C
2)(A
1, A
2)
についても同様である.このような軌跡はf
によるu
i方向の座標曲線であり,以降ではf : I
1× I
2−→
R
2であるときにf (C
i)(I
1, I
2)
の各要素を単に,座標変換f
におけるu
i方向の座標曲線とよぶ.また,f(C )(A
1,A
2) := f(C
1)(A
1, A
2) ∪ f (C
2)(A
1,A
2) (16)
なる集合は,座標変換
f : I
1× I
2−→ R
2 をA
1× A
2 に制限した場合にR
2 に描かれる座標曲線の全体で ある.例として,A1= { 0, R
1, R
2, ··· , R
6} ⊆ R
+,A2= { 0, Θ
1, Θ
2, ··· , Θ
5} ⊆ R
なる集合を与える.このとき,f
p(C )(A
1, A
2)
およびC ( f
p; A
1, A
2)
の各要素は図3
およ び図4
のようにプロットされる.図3
および図4
には 座標曲線とともに領域D
1,D
2, D
1, D
2が示されており,D
i= f
p(D
i) (i = 1, 2)
である.図4
に示されたD
1およ びD
2は,いずれもC ( f
p; A
1,A
2)
の要素である直線がな す交点を頂点とし,各頂点をr
およびθ
方向の直線で結 んで得られる長方形である.このような長方形は,Vir-tual Space
におけるセルに他ならない.ただし,この例では
A
1およびA
2が有限集合であることによってVirtual
Space
は離散的なので,D1およびD
2なる長方形の辺をなすような連続的な直線は
C ( f
p;A
1, A
2)
に含まれず,D
1 およびD
2はVirtual Space
に含まれない.しかしながら,前述のように,直線状の離散的な点の並びも広義の直線 と考えることで,頂点の集合自体をセルと考えられる.
よって本論文では,座標変換
f : I
1× I
2−→ R
2(I
1, I
2⊆ R )
と任意のA
i⊆ I
i(i = 1,2)
に対し,次なる集合の要素をVirtual Space
におけるセルとして扱う:Cell(f;A1,A2) :=
(u1,v1)×(u2,v2) u
i,vi∈Ai (i=1,2),
ui<vi(i=1,2)
.
(17)
このとき,
f(Cell)(A1,A2)
=
(f(u1),f(v1))×(f(u2),f(v2)) u
i,vi∈Ai (i=1,2), ui<vi(i=1,2)
.
(18)
は
Physical Space
におけるセルの全体となる.以上に定義した座標曲線によって,
f : I
1× I
2−→ R
2,A
i⊆ I
i(i = 1,2)
とするとき,集合としての定義が与えら れていなかったPhysical Space
およびVirtual Space
が式(19)
および式(21)
のように表せる:(Virtual Space)
= { l
1∩ l
2| l
i∈ C
i( f ;A
1,A
2) (i = 1,2) } , (19) (Physical Space)
= { f (x) | x ∈ (Virtual Space) } (20)
すなわち,Virtual Spaceはdom( f )
に存在する直線l
1∈ C
1( f ;A
1, A
2)
と直線l
2∈ C
1( f ; A
1, A
2)
の交点の全体で,Physical Space
は座標曲線の交点の全体に等しい.なお,特に
f
が一対一の対応の場合,Physical Space
について(Physical Space)
= { f (l
1) ∩ f (l
2) | l
i∈ C
i( f; A
1, A
2) (i = 1,2) } (21)
が成り立つ.(0,0) u2
u1
1 2 3 4
1 2 3 4
: elements of C 2(g; A1, A2) : elements of C 1(g; A1, A2)
図
2: C (g; A
1,A
2)
の各要素2.4
同相の概念と特異点座標変換
f : I
1× I
2−→ R
2(I
1, I
2⊆ R )
と任意のA
i⊆ I
i(i = 1,2)
に対して次の条件が成り立つとき,f
は同相 写像としての性質を持つ:x
2x
1θ Θ =
1θ Θ =
2θ Θ =
5θ Θ =
3θ Θ =
4θ =
R1 R2 R3R4R5R6: elements of f
p( C
1)(A
1, A
2) : elements of f
p( C
2)(A
1, A
2)
D
1’ D
2’
図
3: f
p(C )(A
1, A
2)
の各要素Θ1 Θ2 Θ3
Θ4 Θ5
0 θ
r
: elements of C 2(fp; A1, A2) : elements of C 1(fp; A1, A2)
R
1R
2R
3R
4R
5R
60
D 1 D 2
図
4: C ( f
p;A
1, A
2)
の各要素1. Cell(A
1, A
2)
とf (Cell)(A
1, A
2)
の要素数が等しい.2. A
1× A
2における任意のVirtual Space
のセルD
と,D
と頂点を共有したVirtual Space
のセルの全体U (D)
に対し,f(U (D))
もまたPhysical Space
のセルf (D)
と頂点を共有するPhysical Space
のセルの全体と なる.このとき,条件の
(1)
はf
が全単射であること,(2)
はf
が連続であり位相構造が保存されることに相当する条件 である.また,条件(1)
および(2)
を満足するような写 像が構成できるとき,Virtual SpaceA
1× A
2とPhysical Space f (A
1× A
2)
は同相であるとする.さらに,Physical
Space
上のある点a
に対し,f
−1(a) = { x ∈ A
1× A
2| f (x) = a } (22)
なる集合の要素がVirtual Space
上の2
つ以上の点と なる場合,aを広義の特異点とする.狭義の特異点は通 常の意味での特異点とし,座標曲線がPhysical Space
の 点b
に縮退している場合,点b
を狭義の特異点とよぶ.狭義の特異点は広義の特異点に含まれ,特に狭義の特異 点では計量テンソルの行列式
g
が0
となる.なお,広 義の特異点は写像の制限によって解析領域から除去で きる.例としてf
pの場合,三角関数の周期性によってPhysical Space
のあらゆる点は広義の特異点となり,特に
(x
1, x
2) = (0, 0)
は狭義の特異点である.ここで,f
pの 定義域を1
周期分に制限し,r= 0
の直線を除いて得ら れる写像f
p|
A=
(x, y) x ∈ A
∧y = f
p(x)
=: F
p, (23) A = { (r , θ ) | r ∈ R
+− { 0 }
∧θ ∈ [0, 2 π ) } (24)
は
Physical Space
上に広義の特異点を持たない.直観的に,
Virtual Space
の圧縮,引き伸ばしのみによっ てPhysical Space
を構成できない場合,f
は同相写像で ない.さらに,Physical Spaceに広義の特異点が存在す るか,同じことであるがPhysical Space
に3
本以上の座 標曲線の交点が存在する場合,f
は同相写像でない.な お,上述の例によってf
pをF
pに制限することで広義 の特異点を除けることを示したが,Fpも同相写像でな い.なぜならば,Virtual Spaceの長方形をF
pによってPhysical Space
上の円にうつす際,長方形の端を接合する必要があるからである.このような変形はセルの近傍 を保存しないため,Fpは同相写像でない.
2.5
物理的意味における特異点の問題2.4
節で述べたように,広義の特異点には複数のVirtual
Space
の点が対応する.曲線座標を用いたFDTD
解析では
Virtual Space
で計算された電磁界をPhysical Space
に うつすので,広義の特異点では複数の物理状態(e.g.
電 磁界の強度)が存在することとなる.このような計算結 果は物理的に妥当でない.さらに数値計算ではタイムス テップが有限であるから,セルサイズが0
となる狭義の 特異点では計算上,物理現象の伝播速度が無限大となる.したがって
CFL
条件により,狭義の特異点は解析領域 に含められない.一方でf
pの例でみたように,写像の 定義域を制限することによって広義の特異点はPhysical
Space
から除去できる.しかしこの制限は,モデルの形状に対する制限に等しい.そしてこのような問題は,