On computation of HOMFLY-PT polynomials of 2–bridge diagrams
村上 雅彦
(日本大学
)∗1谷 聖一
(日本大学
)∗2竹下 文雄
(日本大学大学院
)∗3 概 要2–bridge linkのHOMFLY-PT polynomialをn交点2–bridge dia- gramからO(n3)時間で計算するアルゴリズムを提案する.また,この アルゴリズムを実装する事により行った計算機実験についても触れる.
1.
はじめに
Alexander polynomial [1], Jones polynomial[7]
,
HOMFLY-PT polynomial[3, 16]は,いずれも絡み目の分類において有用な代表的不変量である.
Alexander polyno- mialは多項式時間で計算可能であるが,自明な結び目と同じ
Alexander polynomialを持つ非自明な結び目が知られている.一方,
Jones polynomialや
HOMFLY-PT polynomialは,
Alexander polynomialに比べて絡み目の分別能力が優れている ものの,それらの計算は困難であることが知られている.
Jones polynomialは,
L.H. Kauffman [8]
により示された捻り数と向き付けられていないダイアグラム
の
Kauffman bracket polynomialを用いた組合せ的な計算方法を用いると,
O(n)次の多項式の
2O(n)回の和積で計算できる.ここで,
nは入力のダイアグラムの 交点数とする.K. Sekine, H. Imai, K. Imai [17] は,Jones polynomial の計算時 間を
2O(√n)時間に改善した.しかし,一般に
Jones polynomialや
HOMFLY-PT polynomialの計算は
#P–hardである事が
F. Jaeger, D.L. Vertigan, D.J.A. Welsh[6, 19]
により示されている.このことより,最悪の場合,これらの計算には指数
時間必要であると予想される.
そこで,絡み目に妥当な制限を設けた場合の
Jones polynomialや
HOMFLY-PT polynomialを高速に計算するアルゴリズムの研究も行われている.
J.A. Makowsky [9, 10]は,入力の
Tait graphの木幅が定数で制限されている場合,
Jones poly- nomialは多項式時間で計算可能である事を示した.
J. Mighton [12, 13]は,入 力の
Tait graphの木幅が高々2 である場合,Jones polynomial は
O(n)次の多項 式の
O(n4)回の多項式の演算で計算可能である事を示した.
M. Hara, S. Tani, M. Yamamoto [5]は,
arborescent linkの
Jones polynomialは標準的なダイアグラ ムから
O(n)次の多項式の
O(n3)回の多項式の演算で計算可能である事を示した.
M. Hara, M. Murakami, S. Tani, M. Yamamoto [15, 4]
は,
2–bridge link, closed∗1〒156-8550東京都世田谷区桜上水3-25-40 日本大学文理学部情報科学研究所 e-mail:[email protected]
∗2〒156-8550東京都世田谷区桜上水3-25-40 日本大学文理学部情報システム解析学科
e-mail:[email protected]
∗3〒156-8550東京都世田谷区桜上水3-25-40 日本大学大学院総合基礎科学研究科
e-mail:[email protected]
3–braid link, Montesinos link
の
Jones polynomialは標準的なダイアグラムから
O(n)次の多項式の
O(n)回の多項式の演算で計算可能である事を示した.
T. Ut- sumi, K. Imai [18]は,pretzel link の
Jones polynomialは標準的なダイアグラムか ら
O(n2)時間で計算可能である事を示した.
Y. Diao, C. Ernst, U. Ziegler [2]は,
入力の
nested closed tangle diagramの
tangle depthが高々定数である場合,
Jones polynomialは多項式時間で計算可能である事を示しており,特に,
pretzel link, 2–bridge link, Montesinos linkを含む
Conway algebraic linkの
Jones polynomialは
O(n2)時間で計算可能である事を示した.
H.M. Morton, H.B. Short [14]はあ る定数
kに対して
closed k–braid linkの
HOMFLY-PT polynomialは多項式時間 で計算可能である事を示した.
J.A. Makowsky, J.P. Mari˜no [11]はある定数
kに
対して
k–algebraic linkの
HOMFLY-PT polynomialsは多項式時間で計算可能で
ある事を示した.
本稿では,
2–bridge linkの
HOMFLY-PT polynomialを
n交点
2–bridge diagramから
O(n3)時間で計算するアルゴリズムを提案する.また,このアルゴリズムを 実装する事により行った計算機実験についても触れる.
2.
準備
定義 2.1 HOMFLY-PT polynomial H
は
link diagramの集合から変数
l, mの整 係数ローラン多項式環への写像であり,
link diagramLeに対して以下の様に定義 される.
H() = 1, lH
(
@
@ I )
+l−1H (
@@
@ I )
+mH (
I )
= 0.
ここで,
は任意の
trivial knot diagramである.第
2式において
3つの
linkdiagram
は示されている交点の周辺以外は同一である.
観測 2.2
任意の
n交点の
link diagramの
HOMFLY-PT polynomialの次数の絶対 値は
O(n),項数は
O(n2),係数の絶対値は
O(2O(n))である.
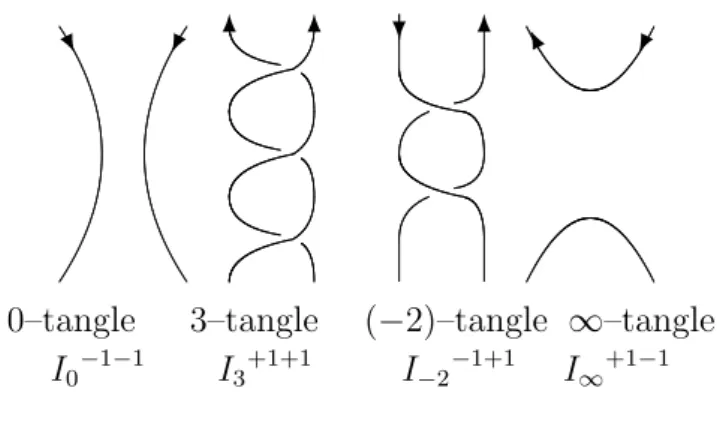
交点の無い
2本の垂直な紐からなる
tangleを
0–tangleとし,交点の無い
2本の 水平な紐からなる
tangleは
∞–tangleとする.任意の整数
kに対して,0–tangle を
k回捻った
tangleを
k–tangleとする.これらを
integer tanglesとし
Ikと表す.
integer tangle
の
2本の紐に向きが与えられているとき,その
integer tangleは向
き付けられているといい,それの向きを+1と
−1で表す.上向きを
+1,下向きを
−1とする.北西を通る紐の向きが
olで北東を通る紐の向きが
orである
integer tangle Ikを
Ikolorと表す(図
1参照).
補題 2.3
H(Ikolor) =
{ −l−2H(Ik−2olor)−l−1mH(Ik−1olor) ol =or
−l2H(Ik−2olor)−lmH(I∞olor) ol 6=or
U 6 6 ? 6K
0–tangle 3–tangle (−2)–tangle ∞–tangle I0−1−1 I3+1+1 I−2−1+1 I∞+1−1
図
1: Integer tanglesと
∞ tangle.ここで,
3つの
link diagramは示されている
integer tangleの周辺以外は同一で ある.
証明 k > 0
の場合は
HOMFLY-PT polynomialの定義と
Reidemeister moveより 明らかである
(図
2, 3参照
).
k ≤0の場合は
HOMFLY-PT polynomialの定義と
Reidemeister moveより以下が明らかである
(図
4, 5参照
).
H(Ik−2olor) =
{ −l2H(Ikolor)−lmH(Ik−1olor) ol=or
−l−2H(Ikolor)−l−1mH(I∞olor) ol6=or
...
6 6
...
6 6
...
6 6
Ikolor Ik−2olor Ik−1olor
図
2: k > 0かつ
ol =or....
6 ?
...
6 ?
...
6 ?
Ikolor Ik−2olor I∞olor
図
3: k >0かつ
ol 6=or....
6 6
...
6 6
...
6 6
Ik−2olor Ikolor Ik−1olor
図
4: k ≤0かつ
ol=or....
6 ?
...
6 ?
...
6 ?
Ik−2olor Ikolor I∞olor
図
5: k ≤0かつ
ol 6=or.整数
a1, . . . , amに対して,integer tangle
Ia1, . . . , Iamからなる図
6の様なダイア
グラムを
2–bridge diagramとし,
R(ae 1, . . . , am)と表す.向き付けられた
2–bridge diagramR(ae 1, . . . , am)に対して,
i番目の
integer tangleIaiの北西を通る紐の向き
を
oli,北東を通る紐の向きを
oriとし,この
2-bridge diagramを
Reol1or1(a1, . . . , am)と表す(図
6参照).
ol1, or1,(a1, . . . , am)より
ol2, or2, . . . , olm, ormは計算可能である.
I
a1
I
a2
I
a3
Iam−1
I
am@@
ApppppA
I
I
a1
I
a2
I
am
Iam−1
@@
@@
ppppp ppppp pp I
m
が奇数
mが偶数
Re+1+1(a1, . . . , am) Re+1−1(a1, . . . , am)
図
6: 2–bridge diagram観測 2.4 i≥2
のとき,以下が成り立つ.
oli =
ori−1 i
が偶数かつ
ai−1が偶数
oli−1 iが偶数かつ
ai−1が奇数
oli−2 iが奇数かつ
ai−2が偶数
ori−2 iが奇数かつ
ai−2が奇数
ori =
−or1 if i= 2
oli−1 if i
が奇数で
ai−1が偶数
ori−1 if iが奇数で
ai−1が奇数
ori−2 if i≥4
かつ
iが偶数かつ
ai−2が偶数
oli−2 if i≥4かつ
iが偶数かつ
ai−2が奇数
3.
アルゴリズム
任意の
n交点
2–bridge diagramは
O(n2)時間で
Tait graphに変換可能である.
その
Tait graphから
R(ae 1, . . . , am)が元の
2–bridge diagramとなる様な整数列
(a1, . . . , am)は
O(n)時間で計算可能である
[15].ここで
n = |a1|+· · ·+|am|で
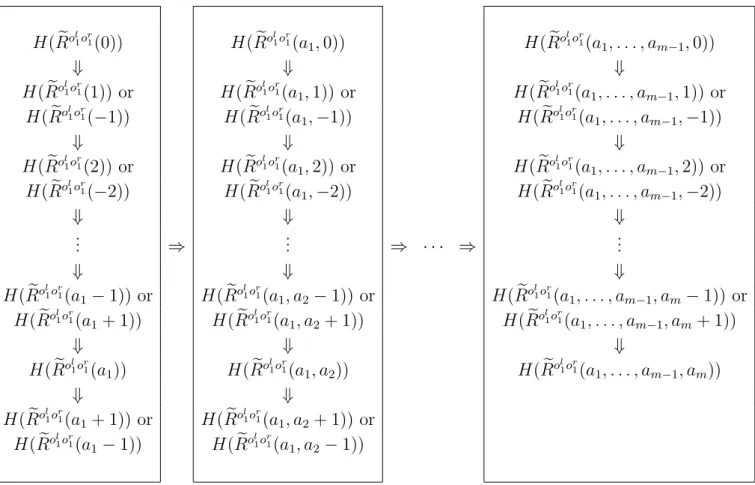
ある.本稿では
(a1, . . . , am)から
HOMFLY-PT polynomial H(R(ae 1, . . . , am))を
O(n3)時間で計算するアルゴリズムを提案する.このアルゴリズムでは重複しな
い
O(n)個の
HOMFLY-PT polynomialをそれぞれ
O(n2)時間で計算する(図
7参
照).補題
3.1, 3.2で各
HOMFLY-PT polynomialがどの様に計算可能か示す.
H(Reol1or1(0)) H(Reol1or1(a1,0)) H(Reol1or1(a1, . . . , am−1,0))
⇓ ⇓ ⇓
H(Reol1or1(1)) or H(Reol1or1(a1,1)) or H(Reol1or1(a1, . . . , am−1,1)) or H(Reol1or1(−1)) H(Reol1or1(a1,−1)) H(Reol1or1(a1, . . . , am−1,−1))
⇓ ⇓ ⇓
H(Reol1or1(2)) or H(Reol1or1(a1,2)) or H(Reol1or1(a1, . . . , am−1,2)) or H(Reol1or1(−2)) H(Reol1or1(a1,−2)) H(Reol1or1(a1, . . . , am−1,−2))
⇓ ⇓ ⇓
... ⇒ ... ⇒ · · · ⇒ ...
⇓ ⇓ ⇓
H(Reol1or1(a1−1)) or H(Reol1or1(a1, a2−1)) or H(Reol1or1(a1, . . . , am−1, am−1)) or H(Reol1or1(a1+ 1)) H(Reol1or1(a1, a2+ 1)) H(Reol1or1(a1, . . . , am−1, am+ 1))
⇓ ⇓ ⇓
H(Reol1or1(a1)) H(Reol1or1(a1, a2)) H(Reol1or1(a1, . . . , am−1, am))
⇓ ⇓
H(Reol1or1(a1+ 1)) or H(Reol1or1(a1, a2+ 1)) or H(Reol1or1(a1−1)) H(Reol1or1(a1, a2−1))
図
7: 2–bridge diagramの
HOMFLY-PT polynomialの計算
補題 3.1
H(Reol1or1(a1, . . . , am))
=
−l−2H(Reol1or1(a1−2))−l−1mH(Reol1or1(a1−1)) olm =orm
かつ
m = 1−l−2H(Reol1or1(a1, . . . , am−1, am−2))
−l−1mH(Reol1or1(a1, . . . , am−1, am−1)) olm =orm
かつ
m ≥2−l2H(Reol1or1(a1−2))−lm olm 6=orm
かつ
m = 1−l2H(Reol1or1(a1, . . . , am−1, am−2))
−lmH(Reol1or1(a1, . . . , am−1)) olm 6=orm
かつ
m ≥2 証明この補題は
Reol1or1(a1, . . . , am)の
m番目の
integer tangle Iamolmorm
に補題
2.3を適用する事により導かれる.
補題 3.2
H(Reol1or1(a1, . . . , am))
=
−lm−1−l−1m−1 m = 1
かつ
a1 = 01 m = 1
かつ
a1 =±1または
m = 2かつ
a2 = 0H(Reol1or1(a1∓1)) m = 2
かつ
a2 =±1 H(Reol1or1(a1, . . . , am−2)) m ≥3かつ
am = 0 H(Reol1or1(a1, . . . , am−2, am−1∓1)) m ≥3かつ
am =±1証明 m = 1
かつ
a1 = ±1または
m = 2かつ
a2 = 0の場合は
Reidemeister moveより
Reol1or1(±1)と
Reol1or1(a1,0)は
trivial knotである事から導かれる.
m = 1
かつ
a1 = 0の場合は
Reol1or1(0)と
Reol1,−or1(0)は同じ
linkである事より一般 性を失うことなく
ol1 =or1と仮定し
Reol1or1(0)の
integer tangle I0ol1or1に補題
2.3を適 用する事により以下が得られる.
H(Reol1or1(1)) =−l−2H(Reol1or1(−1))−l−1mH(Reol1or1(0))
m = 2
かつ
a2 =±1の場合は
Reol1or1(a1,±1)と
Reol1or1(a1∓1)が
equivalent linkで ある.
m ≥ 3
かつ
am = 0の場合は
Reidemeister moveより
Reol1or1(a1, . . . , am−1,0)と
Reol1or1(a1, . . . , am−2)が
equivalent linkである.
m ≥ 3
か つ
am = ±1の 場 合 は
Reol1or1(a1, . . . , am−1,±1)と
Reol1or1(a1, . . . , am−1, am∓1)が
equivalent linkである.
補題
3.3で図
7の各
HOMFLY-PT polynomialの計算に必要な時間の解析を行う.
補題 3.3 (a1, . . . , am)
を整数列,
ol1, or1を向き,
n = |a1|+ · · · +|am|とする.
H(Reol1or1(a1, . . . , am))
の計算に必要な時間は以下である.
1. m= 1
の場合
O(|a1|n2)時間で計算可能である.
2. m= 2
の場合
H(Reol1or1(a1+ 1))より
O(|a2|n2)時間で計算可能である.
3. m≥3
の場合
H(Reol1or1(a1, . . . , am−2))と
H(Reol1or1(a1, . . . , am−2, am−1+ 1))よ り
O(|am|n2)時間で計算可能である.
証明 2–bridge diagram Reol1or1(a1, . . . , am)
の
integer tangle Ia2, . . . , Iamの向き
ol2, or2, . . . , olm, ormは観測
2.4より
ol1, or1から
O(m)時間で計算可能である.
1.