Stator Metal
Rotor
Piezoelectric ceramics Pressure
Movement of rotor
Direction of the traveling wave
Group 1
t sin ω V
〜
) t sin( ω + φ V Alternating voltage of two aspects
〜 Elliptic motion
Group 2 St
温度特性を考慮した超音波モータの数学モデルの導出
Derivation of Mathematical Models of an Ultrasonic Motor Considering Temperature Characteristics
精密工学専攻 3号 井澤広朗
Hiroaki Isawa
ator Metal
Rotor
Piezoelectric ceramics Pressure
Movement of rotor
Direction of the traveling wave
Group 1
t sin ω V
〜
) t sin( ω + φ V Alternating voltage of two aspects
〜 Elliptic motion
Group 2
Alternat ing voltage
(V, ω,φ)
Rotat ional speed
St ator Rot or
USM St ator/Rotor
cont act Alternat ing voltage
(V, ω,φ)
Rotat ional speed
St ator Rot or
USM St ator/Rotor
cont act
1. 緒言
今後,高齢化社会になり医療・福祉現場でも機械化が進み 人間との共同作業の場面が増えると予想されている.
このような現場で用いられるアクチュエータとして,注目 されているのが超音波モータ(
USM
)である.このモータは,超音波領域の超音波振動を駆動源とするアクチュエータで 電磁波を発生せず,またその影響を受けない.このような特 性は計器類が多く存在する医療現場において有効であると 考える.また,電源が切れていても保持力(自己保持特性)を 有し,低速・高トルクであるためブレーキ機構を必要としな い.このため,様々な分野で応用が期待されている.
一方,
USM
の駆動原理は複雑で入出力関係を表す有効な 解析的モデルが導出されておらず,速度制御やトルク制御を 容易に行うことができない.また,温度の影響を受けやすい.摩擦駆動のため長時間の運転をする際に発熱を伴い,その発 熱により
USM
自身の機械的特性が変化し,回転数が減少し てしまう.このような欠点があるために,限られた分野でし か応用されていないのが現状である.そこで,本研究では
USM
の入力波形による特性の違いに ついて把握し,制御系の運用を容易にするため熱特性を考慮 したモータの入出力特性を表す数学モデルの導出が目的で ある.
2. USM の基礎理論
USM
は圧電素子に高周波の交流電圧を加えることで生じ る振動を用いて駆動するモータである.振動の利用の仕方か ら,クサビ型と進行波型の2
つに分かれるが,進行波型の方 が耐久性に優れているなどの点から現在はこちらが主流と なっている.本研究で用いるUSM
は進行波型である.
Fig. 1
にUSM
の原理図を示す.圧電素子である圧電セラミックを図のように
1
,2
と二つのグループに分けてステータ 金属(弾性体)に接着し,それぞれ交流電圧を加えると定在 波が生じる.各グループに互いに時間的位相差φ
持つ交流電 圧を加えると,発生する二つの定在波が合成され,進行波を 得ることができる.すると,ステータ金属のある一点は楕円 軌跡を描き,ここにロータ(移動体)を押し付けることで駆 動力を得る.この入力する交流電圧の振幅V
,角振動数ω
, 位相差φ
によってUSM
の回転数を制御することが可能であ る.
Fig.1 Principles of a USM
3. USM の特性モデル
3.1 入出力モデル 3.1.1 モデル化の流れ
Gregor Kandarel (1)
・青柳, (2)
のモデル式を参考に,USM
の数 学モデルを検討した.導出は,ステータ,ステータとロータ の接触部,ロータの三要素に分割してそれぞれモデル化し,一つに統合することで行った.
Fig. 2
にモデルの要素につい て図で示す.入力変数は交流電圧の振幅V
,角振動数ω
,位 相差φ
で,出力はUSM
の回転数である.
Fig.2 Components of the model of the USM
3.1.2 ステータモデル
ステータは,電気を機械的なエネルギーに変換する
USM
の重要な要素である.ステータのモデルとして一般的に用い られるのがFig. 2
である.これは,ステータで発生する定常 波の機械的な等価モデルである.上の部分が圧電セラミック の電気的な要素を,下の部分がステータ金属の機械的な要素 を表している.A
は電気的なエネルギーを機械的なものに変 換する比例定数である.このモデルを二つ連結させ,進行波 が発生するステータのモデルとする.このモデルの運動方程式より,入力である二相の交流電圧 を
U Pn
とすると,ステータの振動振幅w n
はそれぞれ次式のよ うに表せる.ここでn
は1
,2
である.( ) t
V
U P 1 = sin ω
(1)
( ω + φ )
= V t
U P 2 sin
(2) (3)
(4)
( )
[
U P i
C P
R P
d S 1/c
S m
eff A
U
Pi
C
PR
Pd
S1/c
Sm
effA
U P i
C P
R P
d S 1/c
S m
eff A
U
Pi
C
PR
Pd
S1/c
Sm
effA
U P i
C P
R P
d S 1/c
S m
eff A
U
Pi
C
PR
Pd
S1/c
Sm
effA
U P i
C P
R P
d S 1/c
S m
eff A
U
Pi
C
PR
Pd
S1/c
Sm
effA
Fig.3 A electrical equivalent circuit
1/C
PR
PU
Pnc
Sd
Sm
effA
1 w
n1/C
PR
PU
Pnc
Sd
Sm
effA
1 w
nm eff kg 0.018 ds Nsm -1 5.761 C p nF 3.37 f res kHz 47.53 R p Ω 37.57 f ant kHz 47.71
1 ]
1 1 1 1
1
S S eff
U U A
w c w d w m
ε
ε +
−
=
+
+ &
&&
]
2 2 1 1
1 P P
( )
[ 2 2 1 1
2
2 2 2 2 2
1 P P
S S eff
ε U ε U
A
w c w d w m
+
−
=
+
+ &
&&
ただし,
V
は振幅,ω
は角周波数,φ
は位相差,m eff
は等価質 量,c Sn
は等価剛性,d Sn
は等価粘性である.ε n
は二つのモデル の連結時に伴うゆがみやずれを表す変数である.ε 1 = ε 2 = ε
として,その値は一般的5%
以下である.また,二つのモデ ルが理想的に同じ振動振幅で振動するとしてw 1 = w 2 = w
と する.
ここで,
USM
の重要な特性として,入力アドミタンスが 挙げられる.交流回路における電流の流れやすさを表わし,入力電流と印加電圧の比で求められる.ステータの等価回路
を
Fig. 3
と仮定すると,次式のように表わせる.( ) [ eff s 2 + ( A 2 R P + d s ) s + A 2 / C P + c S ]
( )
( )
2 1 3
/ /
/ −
⎥ ⎥
⎦
⎤
⎢ ⎢
⎣
⎡
+ +
+
+
× +
=
P S P S S P
P eff s P eff P
C c s C d c R
s C m d R s m R
m s s Y
(5)
ただし,
C P
はキャパシタンス,R p
は等価抵抗である,f res
は共 振周波数,f ant
は反共振周波数である.実験により計測したア ドミタンス曲線と式(3)
,(4)
の計算によって求めた理論値が 一致するようにそれぞれのパラメータを決定した.具体的な各パラメータの決定方法について述べる.等価質 量
m eff
,キャパシタンスC P
,共振周波数f res
,反共振周波数f ant
の各パラメータについては,実験により計測した値を用いた.
さらに,これらの実測したパラメータより,等価剛性
c S
,比 例定数A
は次式のように表わせる.( 2 res ) 2
eff
S m f
c = π
(6)
( ) ( )
[ 2 2 ]
2 m eff C p f ant f res
A = π − (7)
残りの等価粘性
d S
,等価抵抗R P
を,実験により計測したア ドミタンス曲線と式(3.5)
より計算した値が一致するように パラメータを決定した.実験により計測したステータのアドミタンス曲線と式
(5)
より計算した値をFig. 4
に示す.また,この実験値と理論値 の比較によって決定した各パラメータをTable 1
に示す.実 験値と理論値は で,概ねよい近似ができたと考え る.987 .
2 = 0 R
4.65 4.7 4.75 4.8 4.85
x 10 4 -75
-70 -65 -60 -55 -50 -45
A d m it tan ce d B
3.1.3 ステータ/ロータの接触部のモデル
ステータとロータの接触部の拡大図を
Fig. 5
に示す.式(3)
,(4)
で求めた を振幅とする定在波がステータで発生し,それ らを重ね合わせると,ステータに進行波が発生する.その波 の頂点の速度 は次式で表せる.w
v S
( )
( ω φ ) ω φ
φ ω ω φ
sin sin sin
2 cos cos 1
2 2 t 2 t
t r
w an v
S n
S + +
+
= − (8)
ただし,
a
はステータの厚み,n
は波の数,r S
はステータの半 径である.次に,ロータの慣性モーメントを
J
,回転角をθ
,ロータ の押し付け力をF C
とすると,ステータからロータへの力の伝 達式が次式で表すことができる.
J θ && + Br R 2 F C θ & = Br R v S F C
(9)
v R = r R θ &
(10)
ただし,
B
は比例定数,r R
はロータの半径である.Fig.2 Mechanical equivalent models of a stator
Table 1 Parameters of the admittance model Fig.4 The admittance curve of the stator and the model
Frequency Hz
Measurement Model
4.65 4.7 4.75 4.8 4.85
x 10 4 -75
-70 -65 -60 -55 -50 -45
A d m it tan ce d B
Frequency Hz
Measurement Model
Admittance dB
Frequency kHz
F
cRotor
Stator v
sv
Ra
Moving direction of traveling wave Surface
F
cRotor
Stator v
sv
Ra
Moving direction of traveling wave Surface
-75 -70 -65 -60 -55 -50 -45 -40
46.80 47.00 47.20 47.40 47.60 47.80 48.00 48.20 24 ℃ 40 ℃ 50 ℃ 60 ℃
Admittance dB
Frequency kHz Frequency kHz
Rotational speed rpm
0 50 100 150 200 250 300 350 400 450 50049 49.5 50 50.5 51 51.5 52 52.5 53
Frequency kHz Rotational speed rpm
0200 400 600 800 1000 1200 1400
47 47.5 48 48.5 49 49.5 50 50.5
3.2 温度特性モデル
2
章で述べたとおり,USM
は駆動させ続けると温度が上昇 し,回転数が減少する.そして,この減少によって,摩擦熱 は減少し,今度はUSM
の温度が減少する.結果,長時間経 過すると,温度と回転数が一定値に収束していく.まず,
USM
の駆動によって発生する摩擦熱を考える.質量W
の物体を摩擦係数µ
の平面にF C
の力で押し付け,速度 で 動かすときの熱量が次式で表せるv
(3)
.( C )
usm v t W g F
Q = ∆ ⋅ +
∆ µ
)
(11)
ただし,g
は重力加速度である.このとき速度 はUSM
の 回転速度で,温度T
によって変化する関数 と仮定する.v
( ) T v
次に,大気の熱容量を無限大と仮定すると,
USM
の温度上 昇は,ニュートンの冷却法則および熱容量式より,次式で表 せる(4)
.( ) ( usm air
air S t T t T
Q = ∆ −
∆ α
(12)
(13)
( ) (
[ ]
air usm
usm usm
usm
Q Q
t T t t T C
∆
−
∆
=
−
∆
+ )
ただし,
∆ Q usm
はUSM
の発熱量,∆ Q air
は大気に放出される 熱量,C usm
はUSM
の熱容量,α
は表面熱伝導率,S
はUSM
の 全表面積,T usm
はUSM
の表面温度,T air
は大気温度,t
は駆動 時間である.以上の式(11)
〜(13)
をまとめ,時間で微分するこ とにより次式が求められる.( )
( )( )
⎥ ⎥
⎦
⎤
⎢ ⎢
⎣
⎡
⎟⎟ ⎠
⎜⎜ ⎞
⎝
⎛ − + −
= ⋅
−
C t S S
F g W T v
T t T
usm C
air usm
α α
µ 1 exp
(14)
4. 実験結果と考察
4.1 入出力特性
USM
は周波数制御方式が,その容易さから一般的である.そこで,モデルの検証として,交流電圧の振幅
200 V
,位相差
90 deg
,表面温度24
℃の場合の周波数と回転数の関係を計測し,モデルによって求めた理論値と比較した.それを
Fig. 6
に示す.実験値は,回転数がもっとも高い共振周波数から周波数を 上昇させると,回転数が減少した.モデルによる理論値は,
オーダーとグラフの傾向を一致させることができた.しかし,
共振周波数近辺では大きく違う値となった.これは,超音波 モータの特徴のためだと考える.
実験において,共振周波数より周波数を減少させると,回 転数は急激に減少した.このような挙動を示すのことは,
USM
の特徴として知られており,製品化されているUSM
は 最高回転数より低い回転数の範囲で制御を行うことが多い.理論値は,最高回転数を示す共振周波数が実験値と
2
kHz 差が生じた.また,回転数のオーダーは一致したが,最高 回転数で大きな差が生じた.さらに,傾きも大きく異な った.ステータとロータ間のモデルの更なる検討が必要だと 考える.
Fig.5 Driving Mechanism of USM
(a) Measurement (b) Model
Fig.6 The relationship between frequency and rotational speed
4.2 温度特性
式
(8)
によって,温度特性を求めるには温度と回転数の関数 であるv ( ) T
が必要である.そこで注目したのが,Fig. 4
に示 したステータのアドミタンス特性である.表面温度が
24
,40
,50
,60
℃の時の,特性について計測 した結果をFig. 7
に示す.図より,温度が上昇するとグラフ がx
軸のマイナス方向にスライドおり,共振周波数は10
℃の上昇で
100 Hz
減少している.よって,USM
の周波数と回転数の特性も同様の傾向を示すと考える.
ここで,周波数と回転数の特性について,温度を室温
24
,40
,50
,60
℃と変化させて計測した結果と,モデルによっ て計算した結果をFig. 8
に示す.ただし,挙動が安定な共振 周波数より高い周波数の範囲で検討していく.図より,ステ ータのアドミタンス特性と同様に,温度上昇によってグラフ がx
軸のマイナス方向にスライドした.この
Fig. 9
のモデルの理論値を各温度において,周波数をf
と回転数をn
として= a / ( f + b )
T
n
の式で近似を行った.さ らに,各温度T
においてa
は定数でb
の値を温度T K
の関数 と仮定し,一次式で近似した.以上よりv )
は次式のように なる.( ( ) T = 30 ∗ f + ( 9 . 94 ∗ 10 140 − 3 ∗ T − 50 . 3 )
v π
(15)
Fig.7 The relationship between the admittance and frequency
of the stator as a parameter of temperature
Time s
25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
0 50 100 150 200
300[rpm]
230[rpm]
180[rpm]
110[rpm]
50[rpm]
0 50 100 150 200 250 300 350 400 450 500
49 49.5 50 50.5 51 51.5 52 52.5 53
24 ℃ 40 ℃ 50 ℃ 60 ℃
Rotation al speed rp m
Fig.8 The relationship between frequency and rotational speed as a parameter of temperature
Frequency kHz
Rotation al speed rp m
Frequency kHz
Time s Rotation al speed rp m Rotation al speed rp m
Time s
0 200 400 600 800 1000 1200 1400
47 47.5 48 48.5 49 49.5 50 50.5
24 ℃ 40 ℃ 50 ℃ 60 ℃
0 50 100 150 200 250 300 350
0 50 100 150 200
300[rpm]
230[rpm]
180[rpm]
110[rpm]
50[rpm]
25 30 35 40 45 50 55 60 65 70 75 80 85 90
0 50 100 150 200
300[rpm]
230[rpm]
180[rpm]
110[rpm]
50[rpm]
0 50 100 150 200 250 300 350
0 50 100 150 200
300[rpm]
230[rpm]
180[rpm]
110[rpm]
50[rpm]
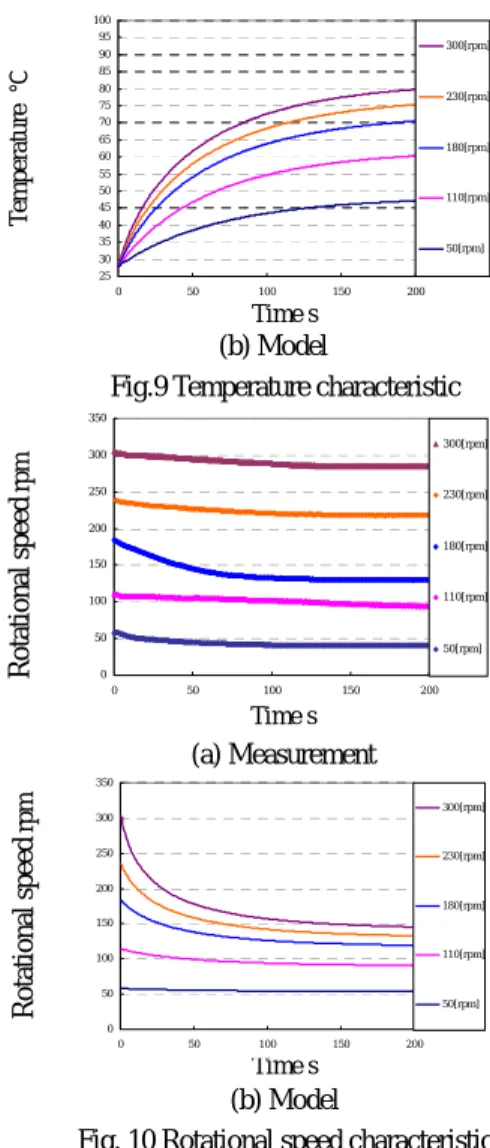
初期回転数を
50
,110
,180
,230
,300 rpm
で100 s
回転さ せた時の温度と回転数の変化を実験によって計測した結果 を,式(14)
,(15)
より理論値を計算した結果をFig. 9, 10
に示 す.時間が経過するにしたがって,
USM
の表面温度は上昇し,回転数が下がる様子を実験により確認できた.モデルの理論 値は表面温度,回転数の変化ともに同じ傾向を示し,オーダ ーは一致した.しかし,表面温度の特性は実験値より大きな 値になった.また,回転数の特性は初期回転数が上昇するに したがって実験値より大幅に減少する結果となった.これは モデルにおいて,大気への熱量の移動はモータ表面からしか 考慮していないが,実際はモータを固定してある土台からも 放熱しているためだと考える.また,本モデルにおける温度 による影響を,回転数にしか考慮していないが,他にも温度 依存性の高いパラメータがあるためだと考える.
T emperatu re ℃
(b) Model
Fig.9 Temperature characteristic
(a) Measurement
(a) Measurement
(b) Model
(b) Model
Fig. 10 Rotational speed characteristic
5. 結言
USM
の入出力特性及び温度特性の数式モデルを導き出し,実験値と比較した.
(1) 入出力特性は,グラフの傾向とオーダーを一致させるこ とができた.しかし,実験値よりも傾きが大きく異なり,
最高回転数付近で実験値より大きな値を示した.
(2) 温度特性は,グラフの傾向とオーダーを一致させること ができた.しかし,初期回転数を高くするに従い,実験 値と大きく異なる結果となった.
参考文献
(1) Gregor Kandare and Jorg Wallaschek, Derivation and Validation of a Mathematical Model for Traveling Wave Ultrasonic Motors, Smart Materials and Structures, 11, (2002) pp. 565–574 .
(2)
青柳誠司,小田高広,神谷好承,岡部佐規一,超音波 モータの高速・精密位置決め制御に関する研究,精密機 械工学会誌,59-2 (1993) pp. 299-304
T emperatu re ℃
(3) F
.P
.バウデン,D
.テイバー,固体の摩擦と潤滑,丸善,東京