Overlapping
Domain Decomposition with
Non-matching
Grids
-Yuri
A. Kuznetsov
Institute of Numerical $\mathrm{M}\mathrm{a}\mathrm{t}\mathrm{h}\mathrm{e}\mathrm{m}.\mathrm{a}\mathrm{t}\mathrm{i}_{\mathrm{C}}\mathrm{s}$
Russian Academy of Sciences, Moscow
Abstract –A macro-hybrid formulation based on overlapping domain
decompo-sition is introduced and studied for a model elliptic partial differential equation.
The problem is discretized by the mortar element method using non-matching grids
on the interfaces between subdomains. An iterative method of an optimal order of arithmetical complexity is proposed for solving the arising algebraic systems in the
case of regular quasiuniform hierarchical grids. Results of numerical experiments
are presented.
1
INTRODUCTION
In this paper we consider two topics. In Section 2 we introduce a new macro-hybrid
formulation for the Poisson equation with the Neumann boundary condition based on
overlapping domain decomposition. An example of such$\mathrm{f}\mathrm{o}\mathrm{r}\acute{\mathrm{m}}\mathrm{u}\mathrm{l}\mathrm{a}\mathrm{t}\mathrm{i}_{\mathrm{o}\mathrm{n}}$
was originally given
in [8]. The approach proposed here has many common points with the decentralization
methods studied more than twenty years ago in $[1, 10]$. In these papers the authors
used splittings ofbilinear forms between different subdomains to decompose avariational
problem.
The second important topic is presented in Section 4 where we consider an extension
of results from $[7, 8]$ to the case of overlapping subdomains. Here we present several
results which mainly concern the construction of the interface preconditioner.
In
Section
5 results ofnumerical experiments for a $2\mathrm{D}$ test problem are given.2
MACRO-HYBRID BASED
ON OVERLAPPING
DOMAIN
DECOMPOSITION
Let us consider a model elliptic problem
$-\Delta u+Cu$ $=$ $f$
in
$\Omega$$\frac{\partial u}{\partial \mathrm{n}}$ $=0$ on $\partial\Omega$
(1)
where $f\in L_{2}(\Omega)$ is a given function, $c\equiv \mathrm{c}\mathrm{o}\mathrm{n}\mathrm{s}\mathrm{t}\in(0;1$], $\partial\Omega$ is the boundary of a domain
$\Omega$ and
$\Omega$ is a polygon in $\mathrm{R}^{2}$, with diam
$(\Omega)\sim O(1)$, and all further subdomains of $\Omega$
a.re
alsopolygons with diameters $O(1)$
.
The classical weak formulation of (1) is: find $u\in H^{1}(\Omega)$ such that
$\Phi(u)=$ $\min\Phi(v)$, (2)
$v\in H^{1}(\Omega)$
where
$\Phi(v)=\int\Omega[|\nabla v|2+Cv^{2}-2fv]d\Omega$. (3)
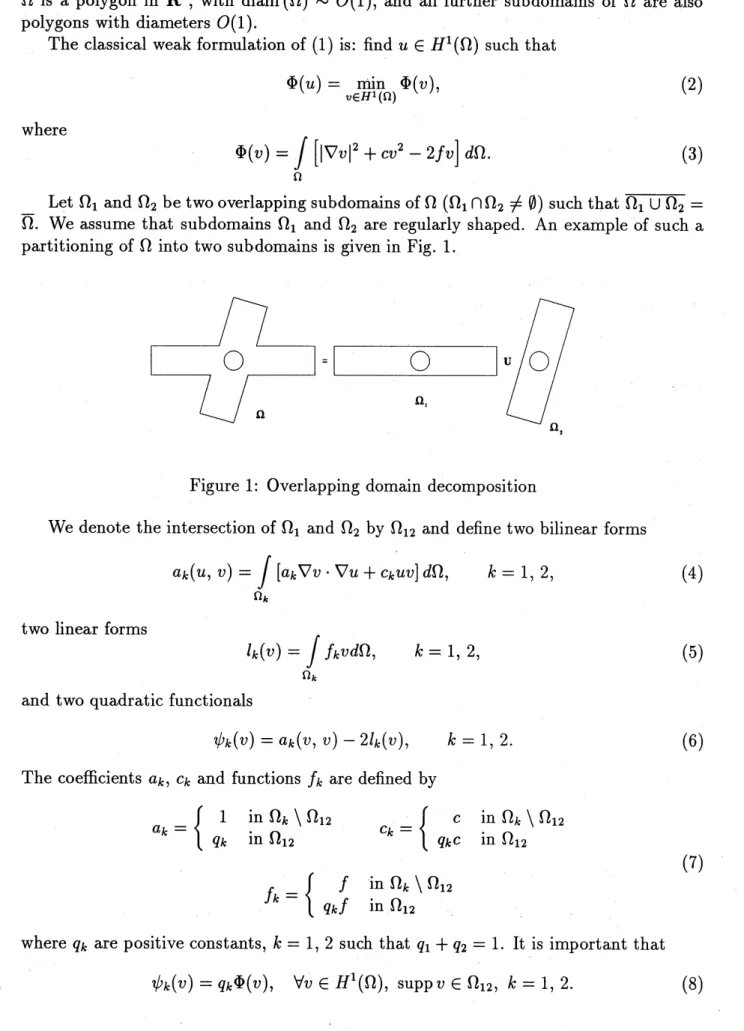
Let $\Omega_{1}$ and $\Omega_{2}$ be twooverlapping subdomains of$\Omega(\Omega_{1}\cap\Omega_{2}\neq\emptyset)$ such that $\overline{\Omega_{1}\cup\Omega_{2}}=$
$\overline{\Omega}$
.
We assume that subdomains $\Omega_{1}$ and $\Omega_{2}$ are regularly shaped. An example of such a
partitioning of$\Omega$ into two subdomains is given in Fig. 1.
Figure 1: Overlapping domain decomposition
We denote the intersection of$\Omega_{1}$ and $\Omega_{2}$ by $\Omega_{12}$ and define two bilinear forms
$a_{k}(u, v)= \int[ak\Omega_{k}\nabla v\cdot\nabla u+C_{k}uv]d\Omega$, $k=1,2$, (4)
two linear forms
$l_{k}(v)= \Omega\int_{k}fkvd\Omega$, $k=1,2$, (5)
and two quadratic functionals
$\psi_{k}(v)=a_{k}(v, v)-2l_{k}(v)$, $k=1,2$. (6)
The coefficients $a_{k},$ $c_{k}$ and functions $f_{k}$ are defined by
$a_{k}=\{$ 1 in $\Omega_{k}\backslash \Omega_{12}$ $q_{k}$ in $\Omega_{12}$ $c_{k}=\{$ $c$ in $\Omega_{k}\backslash \Omega_{12}$ $q_{k^{C}}$ in $\Omega_{12}$ $f_{k}=\{$ (7) $f$ in $\Omega_{k}\backslash \dot{\Omega}_{12}$ $q_{k}f$ in $\Omega_{12}$
where $q_{k}$ are positive constants, $k=1,2$ such that $q_{1}+q_{2}=1$
.
It is important thatTo introduce andto analyze macro-hybridformulationsof elliptic
moblems
wehave to deal$\mathrm{w}\mathrm{i}\dot{\mathrm{t}}\mathrm{h}$interfaces betweensubdomains. Tothis end weintroducethefollowingnotation:
$\Gamma_{k}$ $=$ $(\partial\Omega_{k}\cap\Omega)$, $k=1,2$, (9)
$\Gamma$ $=$ $\Gamma_{1}\cup\Gamma_{2}$.
Now we introduce the space $V=H^{1}(\Omega_{1})\cross H^{1}(\Omega_{2})$
,
the space$W= \{\overline{v}=(v_{1}, v_{2}):\overline{v}\in V,\int_{\Gamma}(v_{1}-v_{2})\mu dS=0,$ $\forall\mu\in H-1/2(\Gamma)\}$ (10)
and the $..\mathrm{q}_{l}\mathrm{u}\mathrm{a}\mathrm{d}\mathrm{r}\mathrm{a}\mathrm{t}\mathrm{i}\mathrm{C}\mathrm{f}\mathrm{u}\mathrm{n}\mathrm{c}\mathrm{t}\mathrm{i}\mathrm{o}\mathrm{n}\mathrm{a}:1.-$
$\psi(\overline{v})=\psi_{1}(v_{\iota})+^{\psi}2(v_{2})$, $\overline{v}\in V$. (11)
It can be shown (see, for instance [5]) that under the assumptions made the following
macro-hybrid formulation of problem (1):
$\overline{u}\in V$ :
$\psi(\overline{u})=\min_{\overline{v}\in W}\psi(\overline{v})$ (12)
has a unique solution and is equivalent to problem (2). We understand the equivalence
in the sense that
$u(x)=u_{k}(x)$ $\forall x\in\Omega_{k}$, (13)
where $u$ is the solution function to (2).
Problem (12) has also an equivalent formulation in terms of Lagrangemultipliers. For
instance, in the case $0\dot{\mathrm{f}}$example in Fig. lb it can be presented in the following form: find
$(\overline{u},\overline{\lambda})\in V\cross$ A such that
$a_{1}(u_{1,1}v)+ \int_{1}\lambda 1v_{1}ds-\int_{\Gamma\Gamma 2}\lambda 2v1ds$ $=$ $l_{1}(v_{1})$,
$a_{2}(u_{2}, v_{2})- \Gamma_{1}\int\lambda_{1}v2dS+\int_{\Gamma_{2}}\lambda_{2}v2d_{S}$ $=$ $l_{2}(v_{2})$, $\int(u_{1}-u_{2})\mu 1dS$ $–0$,
(14)
$\int_{\Gamma_{2}}^{\Gamma_{1}}(u_{1}-u2)\mu_{2}dS$ $=$ $0$,
$\forall(\overline{v},\overline{\mu})\in V\cross\Lambda$
.
Here $\Lambda=\prod_{s=1}^{2}H-1/2(\Gamma_{S})$. It can be easily shown that$\lambda_{1}=-q_{1^{\frac{\partial u_{1}}{\partial \mathrm{n}_{1}}}}$ on $\Gamma_{1}$, $\lambda_{2}=-q_{2^{\frac{\partial u_{2}}{\partial \mathrm{n}_{2}}}}$ on $\Gamma_{2}$, (15)
where $\mathrm{n}_{1}$ and $\mathrm{n}_{2}$ are the outer normal
$.\mathrm{v}$
ecto.rs
to$\partial\Omega_{1}$
. and
$\partial\Omega_{2}$, respectively. Recall that
$u_{1}\equiv u$ in $\Omega_{1}$ and $u_{2}\equiv u$ in $\Omega_{2}$.
In a compact form (14) can be presented $[6^{\backslash },‘ 5]$
by: find $(\overline{u},\overline{\lambda})\in V\cross\Lambda$ such that
\^a$(\overline{u},\overline{v})+b(\overline{\lambda},\overline{v})$ $=$ $l(\overline{v})\wedge$,
(16)
Here
$V= \prod_{k=1}V_{k}2$
,
$V_{k}=H^{1}(\Omega_{k}),$ $k_{--}1,2$,$\Lambda=\prod_{s=1}^{2}..\Lambda_{s}$, $\Lambda_{S^{--H^{-1}}}/2(\mathrm{r}_{s}),$ $s=1,2$, (17)
\^a$( \overline{u},\overline{v})=\sum_{k=1}^{2}a_{k}(u, v)$, $l( \overline{v})\wedge=\sum_{k=1}^{2}l_{k(v})$.
Remark If$\int_{\Omega}fd\Omega=0$ and $c\ll 1$ then problem (1) can be considered as a singular
perturbation of the
Neumann
problem$-\Delta u$ $=$ $f$ in $\Omega$
$\frac{\partial u}{\partial \mathrm{n}}$
$=$ $0$ on $\partial\Omega$
.
(18)
3
THE MORTAR
ELEMENT METHOD
AND
ALGEBRAIC SYSTEMS
We consider the only case when $\Omega_{kh}$ are conforming triangular partitions of$\Omega_{k},$ $k=1,2$.
Then $V_{kh}$ are the standard piece-wide linear finite element subspaces of $V_{k}\equiv H^{1}(\Omega_{k})$,
$k=1,2$
.
The finite element subspaces $\Lambda_{sh}\subset\Lambda\equiv H^{-\frac{1}{2}}(\Gamma_{s}),$ $S=1,2$ are chosen using themortar element technique $i^{\mathrm{f}\mathrm{r}\mathrm{o}\mathrm{m}}[3,2,8]$.
The mortar finite element discretization of (16)$-(17)$ is defined by: find $(\overline{u}_{h},\overline{\lambda}_{h})\subset$
$V_{h}\cross\Lambda_{h}$ such that
$b(^{\frac{\overline{u}}{\mu}},\overline{u}_{h}’)\hat{a}(h\overline{v})+b(\overline{\lambda}h,\overline{u}h)$ $==$ $0l(,\overline{v})\wedge$, (19)
V$(\overline{v},\overline{\mu})\in V_{h}\cross\Lambda_{h}$ where $\Lambda_{h}=\prod_{s=1}^{2}\Lambda_{sh}$. Problem (19) leads to an algebraic system
$Ax=y$ (20)
with a saddle-point matrix
$A=$
(21)and vectors
$x=$
,$y=$
.
(22)Here $A$ is a symmetric positive definite matrix and $\mathrm{k}\mathrm{e}\mathrm{r}BT^{-}=0$. It
follows immediately that $\det A\neq 0$.
For further analysis we need a more detailed description of $A$ and $B$ in block forms.
The simplest block representations of $A$ and $B^{T}$ are:
Here the $k\mathrm{t}\mathrm{h}$ block corresponds
to the degrees of freedom of the finite element space $V_{k,h}$,
$k=1,2$
.
For each subdomain $\Omega_{k}$ we partitiondegrees of freedom ($\mathrm{g}\mathrm{r}\mathrm{i}\acute{\mathrm{d}}$nodes) into two groups.
In the second group denoted by $\Gamma$ we collect the degrees
offreedom which correspond to
the grid nodes belonging to $\Gamma$
.
Allother degrees of freedom we collect in the first group
denoted by $I$
.
These partitionings induce thefollowing
blockrepresentations:$A_{k}=$
, $B_{k}^{T}=$.
(24)Let $B$ be a symmetric positive definite matrix and $\mathcal{H}=B^{-1}$. Since $A=A^{T}$ the
preconditioned Lanczos $[11, 8]$ can be used to solve system (20). In this paper we also
recommend the preconditioned $\mathrm{c}\mathrm{o}\mathrm{n}\mathrm{j}.\mathrm{u}\mathrm{g}\mathrm{a}\mathrm{t}\mathrm{e}$ method based on the
$B$-norm of minimal
er-rors [11]: $\hat{p}\iota$ $=$ $\{$ $\mathcal{H}\xi^{0}$, $l=1$, $\mathcal{H}\xi^{l-1}-\alpha\iota\hat{p}\iota-1$, $l>1$, $p_{l}$ $=$ $\mathcal{H}A\hat{p}\iota$, (25) $x^{l}$ $=$ $x^{l-1}-\beta lpl$, $\alpha_{l}=\frac{(\xi^{l-}1A\hat{p}\iota-1)_{\mathcal{H}}}{(A\hat{p}\iota-1,A\hat{p}\iota_{-}1)_{\mathcal{H}}},$, $\beta_{l}=\frac{(\xi^{l-1},\hat{p}l)}{(A\hat{p}_{l},A\hat{p}l)\mathcal{H}}$,
where $\xi^{l}=Ax^{l}-y$ are the residual vectors, $l=1,2,$
$\ldots$ Assume that the eigenvalues
of$\mathcal{H}A$ belong to the union of segments
$[d_{1} ; d_{2}]$ and $[d_{3};d_{4}]$ with $d_{1}\leq d_{2}<0<d_{3}\leq d_{4}$
.
Then the convergence estimate
$||x^{\iota_{-x}}||_{\mathcal{H}}\leq 2q^{l}||X^{0}-x||_{\mathcal{H}}$, $l\geq 1$, (26)
holds [11] where $q= \frac{\hat{d}-\check{d}}{\hat{d}+\check{d}},\hat{d}=\max\{d_{4};|d_{1}|\}$, and $\check{d}=\min\{d_{3};|d_{2}|\}$.
4
BLOCK
DIAGONAL
PRECONDITIONER
We propose a preconditioner $\mathcal{H}$ as a block diagonal
matrix:
$\mathcal{H}=$ (27)
where $H_{A}$ is also a block diagonal matrix:
$H_{A}=$
. (28)All blocks are symmetric positive definite matrices. $H_{k}$ are said to be the subdomain
If matrices $H_{k}$ are spectrally equivalent to the matrices $A_{k}^{-1}$ with constants
indepen-dent of the value of the coefficient $c$, and if a matrix $H_{\lambda}$ is spectrally equivalent to the
matrix $S_{\lambda}^{-1}$ with $S_{\lambda}$ given by
$S_{\lambda}=BA-1BT \equiv\sum_{k=1}^{2}Bk\mathrm{r}s_{k}^{-1\tau_{\mathrm{r}}}\mathrm{r}Bk$ (29)
with the constants independent of the value of$c$then the values of$\hat{d},\check{d}$in (26) are positive
constants [7] also independent of $c$. Here
$s_{k\mathrm{r}}=A_{k\Gamma}-Ak\Gamma IA^{-}kI1A_{k}I\Gamma$ (30)
are the Schur complements. Our aim is to construct a preconditioner $\mathcal{H}$spectrally
equiv-alent [7] to the matrix $A^{-1}$ with constants independent of
$c$.
4.1
Subdomain Preconditioners
Let us define matrices $[mathring]_{k}_{A}$
and $M_{k}$ by:
$([mathring]_{k}_{A}v, w)$
$= \int_{\Omega_{k}}\nabla v_{h}\cdot\nabla w_{h}d\Omega$, (31)
$(M_{k}v, w)$
$= \int_{\Omega_{k}}v_{h}w_{h}d\Omega$
$\forall v_{h},$$w_{h}\in V_{kh},$ $k=1,2$. Thus, matrices $A_{k}\mathrm{o}$
are the stiffness matrices forthe $\mathrm{o}\mathrm{p}\mathrm{e}\mathrm{r}\mathrm{a}\mathrm{t}\mathrm{o}\mathrm{r}-\triangle$
with the Neumann boundary conditions, and $M_{k}$ are the corresponding mass matrices. It
can be easily shown [8] that
$A_{k}^{-1} \sim(\mathrm{O}A_{k}+Mk)-1+\frac{1}{c}P_{k}$ (32)
where$P_{k}$ is the $M_{k}$-orthogonal projector onto$\mathrm{k}_{\mathrm{e}\mathrm{r}}Ak\mathrm{o}$
and thesign $”\sim$” denotesthe spectral
equivalence. Moreover, the constants of the spectral equivalence in (32) are independent
of the value of $c$
.
Suppose that a matrix $H_{k}\mathrm{o}$ is
spectrally equivalent to the matrix $([mathring]_{k}_{A}+M_{k})^{-1}$ Then
the matrix
$H_{k}=[mathring]_{k}_{H}+ \frac{1}{c}P_{k}$ (33)
is spectrally equivalent to matrix $A_{k}^{-1}$ with constants independent of the value of
$c$.
We have plenty of choices for $H_{k}^{\mathrm{o}},$
$k=1,2$.
4.2
Interface
Preconditioner
We can easily shown [8] that
$S_{\Gamma k}^{-1} \sim\tilde{S}^{-1}+k\frac{1}{c}P\mathrm{r}k$
where
$\tilde{S}_{k}^{-1}$ isthe Schurcomplementforthematrix $A_{k}\mathrm{o}+M_{k}$ and $P_{\Gamma k}$ isthe $M_{\Gamma k}$orthogonalprojector onto $\mathrm{k}\mathrm{e}\mathrm{r}S_{\Gamma k}$ in the case $c=0$
.
Moreover, the constants of equivalence in (34)are independent ofthe value of$c$
.
Here $M_{\Gamma k}$ is the interfacemass matrix defined by:$(M_{\Gamma k}v, w)$
$= \int_{\mathrm{r}_{k}}v_{h}w_{h}d_{S}$ V$v_{h},$
$w_{h}\in V_{k}\mathrm{r}h$ (35)
where $V_{k\Gamma h}$ is the trace of $V_{kh}$ into $\Gamma_{k},$ $k=1,$
$\ldots,$ $m$.
Let the matrices
$H_{k}^{\mathrm{o}}=($ $[mathring]_{k\Gamma}_{H}IH_{k}^{\mathrm{O}}I$ $H^{\mathrm{O}}kIH^{\mathrm{o}}k\mathrm{r}\mathrm{r}$
)
(36)be spectrally equivalent to the matrices $(\mathrm{O}A_{k}+M_{k})^{-1},k=1,2$. We can also prove that
the matrix
$\hat{S}_{\lambda}=\sum_{=k1}^{2}Bk\Gamma([mathring]_{k}_{H}\Gamma+\frac{1}{c}P\mathrm{r}k)B_{k}^{\tau_{\Gamma}}$ (37)
is spectrally equivalent to $S_{\lambda}$ with constants independent ofthe value of $c$
.
To construct the interface preconditioner $H_{\lambda}$ we shall use the preconditioned
Cheby-shev iterative procedure $[4, 7]$
.
Let $\hat{H}_{\lambda}$be a symmetric positive defined matrix and
$\nu_{\lambda}=\lambda_{\max}/\lambda_{\min}$ where $\lambda_{\max}$ and $\lambda_{\min}$ are the maximal and minimal eigenvalues of $\hat{H}_{\lambda}\hat{S}_{\lambda}$
,
respectively. Then for any $t_{\lambda}\sim\sqrt{\nu_{\lambda}}$ the matrix
$H_{\lambda}=[I_{\lambda}-\square (I_{\lambda}-\alpha_{t}\hat{H}\lambda\hat{s}_{\lambda})t=1t_{\lambda}]\hat{s}^{-1}\lambda$ (38)
is spectrally equivalent to the matrix $S_{\lambda}^{-1}$
.
Let $\hat{B}_{\lambda}$ be a symmetric positive
definite matrix such that $1 \in[\mu\min;\mu_{\max}]$ where $\mu\min$
and $\mu_{\max}$ are the minimal and maximal eigenvalues of the matrix $\hat{B}_{\lambda}^{-1}\sum_{1k=}^{2}B_{k\mathrm{r}}H_{k\Gamma}B_{k\Gamma}^{T}$,
respectively. Then for the choice $\hat{H}_{\lambda}=\hat{R}_{\lambda}^{-1}$ where
$\hat{R}_{\lambda}=\hat{B}_{\lambda}+\frac{1}{c}k\sum_{=1}Bk\mathrm{r}P2k\mathrm{r}B^{T}k\Gamma$
’ (39)
the estimate
$\nu_{\lambda}\leq\hat{\nu}_{\lambda}\equiv\mu_{\max}/\mu\min$ (40)
holds.
A solution algorithm for a system
$\hat{R}_{\lambda^{Z}}=g$
is presentedin $[8, 9]$. It includes a so called “coarse grid” problembased on the projectors
4.3
Arithmetical
Complexity for
Hierarchical grids
Assume that grids $\Omega_{kh}$ are regular, quasiuniform and hierarchical with the average grid
step size $h\sim\sqrt[\mathrm{p}]{N}$where $N$ is the dimension of matrix $A$.
In this case we can usevarious $V$-cycle multilevelpreconditioners to define matrix $[mathring]_{k}_{H}$
in (33). These preconditioners are spectrally equivalent to the matrices $(A_{k}^{\mathrm{o}}+M_{k})^{-1},$ $k=$
$1,2$ andhave theoptimalorder of arithmetical complexity $[12, 13]$, $\mathrm{i}$
.
$\mathrm{e}$. the multiplication
with such a preconditioner by a vector costs $O(N)$ arithmetical operations.
Our choice $H_{k\Gamma}^{\circ}$
in (37) as the corresponding blocks of $V$-cycle multilevel
precon-ditioner (BPX or MDS-type) is based on two observations. The first one is obvious:
spectral equivalenceof $H_{k\Gamma}^{\mathrm{o}}$
and $\tilde{S}_{\Gamma k}^{-1}$ follows directly from the spectral equivalence
of $H_{k}$
and $(\mathrm{O}A_{k}+M_{k})^{-1},k=1,2$
.
The second observation is rather technical and concernsim-plementation algorithms for $V$-cycle multilevel preconditioners: multiplication of $[mathring]_{k\Gamma}_{H}$
by
a vector can be implemented with $O(h^{-1})$ arithmeticaloperations. The latter observation
has at least one very important consequence: the corresponding matrix $\hat{S}_{\lambda}$ can be
multi-plied by a vector with $O(h^{-1})$ arithmeticaloperations, i.e. multiplication with $\hat{S}_{\lambda}$ has
the
optimal order of arithmetical complexity.
$\mathrm{s}$
It remains to choose preconditioner$R_{\lambda}$, and wedo not need an optimal preconditioner
because the dimension of $S_{\lambda}$ is much smaller than the dimension of$A$.
In paper [7] we proposed to choose $\hat{B}_{\lambda}$
being equal to a scalar matrix which is a
spectrally equivalent to the matrix $\sum_{k=1}^{2}B_{k\mathrm{r}\mathrm{r}}M_{k}^{-1}B^{T}k\Gamma$. With this choice, obviously
$\nu_{\lambda}\leq \mathrm{c}\mathrm{o}\mathrm{n}\mathrm{s}\mathrm{t}\cdot h^{-2}$
where the constant is independent of$h$ and $c$, and the multiplication $B_{\lambda}^{-1}$ by a vector can
be implemented with $O(h^{-1})$ arithmetical operations.
On the basis of thelatter facts we conclude that $t_{\nu}$ should be proportional to $h^{-1}$, and
arithmetical complexity of the corresponding preconditioner $H_{\lambda}$ in (38) is of the order
$O(h^{-1})$
.
In some particular cases we can prove $[4, 7]$ that $t_{\nu}\sim h^{-1/2}$ and consequently5
NUMERICAL EXPERIMENT
The numericalexperiments have been performed
for..
the test case given in Fig. 2.$\mathrm{r}4_{\mathrm{h}}$
.
Figure 2:
Cartesian
locally fitted grids in $\Omega_{1}$ and $\Omega_{2}$In the subdomains $\Omega_{1}$ and $\Omega_{2}$ we use rectangular cartesian grids which are fitted to
the interface boundary which consists of four straight segments. These grids are givenin
Fig. 2.
Table 1: Results of numerical experiments
Cartesian
Cartesian
Number of Number ofgrids in $\Omega_{1}$ grids in $\Omega_{2}$ Chebyshev Lanczos
iterations iterations $16\cross 8$ $16\cross 8$ 14 44 $32\cross 16$ $32\cross 16$ 23 52 $64\cross 32$ $64\cross 32$ 32 52 $128\cross 64$ 128 $\cross 64$ 45 54 $256\cross 128$ $256\cross 128$ 63 55
Remark For numerical experiments the subdomain BPX preconditioners were used
in combination with the fictitious domain technique, because grids $\Omega_{kh},$ $k=1,2$ aren’t
hierarchical. The procedure of coupling is described in [7].
ACKNOWLEDGEMENTS
The results of numerical experiments in Section 5 are kindly given for this paper by
References
[1] Bensoussan A., Lions J.-L., and TemamR. (1974) Surles methodes de decomposition,
de decentralisation et de coordination et applications. In Lions J.-L. and Marchuk
G. I. (eds) Methodes Mathematiques de L’Informatique-4, pages
133-257.
Dunod,Paris.
[2] Ben Belgacem F. B. and Maday Y. (1994) The mortar element method for three
dimensional finite elements. Technical report, Universite Paul Sabartier.
[3] Bernardi C., Maday Y., and Patera A. (1989) A new nonconforming approach to
domain decomposition: the mortar element method. In Lions J.-L. and Bresis H.
(eds) Nonlinear PDE and their Applications. Pitman.
[4] Bramble J., Pasciak J., and SchatzA. (1986) The construction of preconditioners for
elliptic problems by substructuring, 1. Math. Comp.
47:
103-134.[5] Brezzi F. and FortinM. (1991) Mixedand Hybrid Finite Element Methods.
Springer-Verlag, New York.
[6] Glowinski R. andWheelerM. (1988) Domain decomposition and mixedfiniteelement
methods for elliptic problems. In Glowinski R., Golub G., G.Meurant, and Periaux
J. (eds) Proc. First DDInt. Conf., pages
144-172.
SIAM, Philadelphia.[7] Kuznetsov Y. A. (1995) Efficient iterative solvers for elliptic finite element problems
on nonmatching grids. Russ. J. Numer. Anal. Math. Modelling 10:
187-211.
[8] Kuznetsov Y. A. (June 1995) Iterative solvers for elliptic finite element problems
on nonmatching grids. In Proc. Int. $Co\check{n}f$. AMCA-95, pages 64-76. NCC Publisher,
Novosibirsk.
[9] Kuznetsov Y. and Wheeler M. (1995) Optimal order substructuring preconditioners
for mixed finite element methods on nonmatching grids. East-West J. Numer. Math.
3:
127-143.
[10] Lemonnier P. (1974) Resolution numerique d’equations aux derivees partielles par
decomposition et coordination. In Lions J.-L. and Marchuk G. I. (eds) Methodes
Mathematiques de L’Informatique-4, pages
259-299.
Dunod, Paris.[11] Marchuk G. I. and Kuznetsov Y. A. (1974) Methodes iteratives et fonctionnelles
quadratiques. In Lions J.-L. and Marchuk G. I. (eds) Methodes Mathematiques de
L’Informatique-4. Dunod, Paris.
[12] Oswald P. (1994) Multilevel Finite Element Approximations: Theory and
Applica-tions. Teubner-Scripten zur Numerik.
[13] Xu J. (1992) Iterative methods by space decomposition and subspace correction.