2階層制御システムに基づく経済性能最適化に関する 研究
指 導 教 員 増 田 士 朗
首都大学東京大学院
システムデザイン研究科 機械システム工学域
( 2 0 1 9
年 度
)1 8 8 6 2 6 3 4
岡山 早百合
目 次
1
はじめに
11.1
背景
. . . . 11.2
研究の目的
. . . . 12
経済性能最適化を含むシステムの構造
3 2.1一般的な構造
. . . . 32.2
本研究における構造
. . . . 43 LQG
基準に基づく経済性能最適化
6 3.1背景
. . . . 63.2
問題の記述
. . . . 63.3 LQG
基準に基づく経済性能最適化の構造
. . . . 73.4
経済性能最適化におけるトレードオフ関係の導入法
. . . . 83.5
学習アルゴリズムに基づく経済性能評価
(Caiの手法
) . . . . 103.6
数値例
. . . . 123.6.1
分離プロセスシステム
2入力
2出力
. . . . 123.6.2
結果:
LQG制御系
. . . . 143.6.3
結果:
MPC . . . . 154
制約条件付き
MPCに基づく経済性能最適化
17 4.1背景
. . . . 174.2 MPC. . . . 17
4.2.1
制約条件のない
MPC. . . . 174.2.2
制約条件のある
MPC. . . . 184.3
問題の記述
. . . . 194.4
下位層における制約条件付き
MPC . . . . 204.5
下位層の制約条件を考慮した上位層の目的関数の設定法
. . . . 234.6
数値例
. . . . 254.6.1
上位層に下位層の制約条件の考慮がない場合
. . . . 254.6.2
上位層に下位層の制約条件の考慮がある場合
. . . . 255
おわりに
31付録
Aモデルに基づく分散の理論値の計算の方法
32付録
Bモデルに基づく評価関数の理論値
34参考文献
36付録:研究業績
371 はじめに
1.1
背景
プロセス制御とは,
JIS-B0155によると「プロセスの操業状態に影響する諸変量を,所 定の目標に合致するように意図的に行う操作」と定義されている.つまり,その主な目的 とは安全に効率的に望まれた操作条件でプロセスを維持することであるので,プロセス制 御の問題とはこれらの目的をいかに達成するかということである.
プロセス制御の基本はフィードバック制御であり,
1942年
Ziegler & Nicholsによって
PID制御則が誕生し,
PID調整器の本格的普及が始まった.その後,
1960年
Kalmanに よって状態ベクトルに注目した最適制御理論の考えが発表されたが,現実のプロセス制御 ではいまだに制御ループの多くは
PID制御で行われている.
PID制御は実績が長く,実 用的で優れており制御性能のよい様々な方式が継続的に開発されている.
しかし,産業界において,原材料の高騰,他社との競合,環境問題などに直面する中,
持続的な利益を得る必要がある.そこでプラントは生産量を拡大しエネルギー消費量を 減少させ製品の品質を向上させるだけではなく,安全性と環境に配慮するため
advanced process control (APC)技術を採用した
[1].特に
model predictive control(MPC)は近年,
広く産業界に浸透した.この時,現状の操業条件で制御されたシステムの経済性能評価が 求められた.先行研究においては最適な経済性能指標の決定の方法を制御されたシステム の経済性能を同定するための指標として用いた.しかし,
Xuらは,性能評価に基づいた 分散が
MPCの経済性能評価に用いられることを示した.制約のある
MPCの性能と経済 性能を評価するために,
linear matrix inequality (LMI)に基づいたアルゴリズムが提案さ れ,制御性能評価として一般的な
LQG指標は経済性能評価に拡張された.ここで問題と なる
LQGトレードオフ曲線の扱いについては,
equigrid LQG回帰法を
2階層
MPCに用 いることを提案した.
一方,
MPCは制約条件を効果的に扱え,多入出力にも対応できるため製造業界に普及 したが.評価関数における重みパラメータの調整が問題となった.また,設定値の選択 は,経済性能向上に影響するため重要である.
MPCにおける重みパラメータと経済性能 の面から見た設定値との関係を明らかにするために,効率的な最適調整と設計方法が必要 となった.しかし,経済性能最適化のための最適設定値を得る以前に,非線形である入出 力分散の完全な関係を得ることは困難であった.そこでこの問題に対して先行研究では
iterative learning control(ILC)を用いて
MPCの重みパラメータの調整を行った.
ILCは 前の試行の追従偏差を使用して,反復性を持ったシステムの制御信号を向上する方法であ る.この方法で適正な生産が行われると同時に変動性が減少し,プロセスシステム分野に 急速に広まった.これによって,経済性能最適化の非線形問題は単純な線形計画問題に帰 着した.さらに,
Caiらは感度分析に基づいた
ILCによって
MPCのパラメータ調整を行 うことで,さらなる経済性能の向上が行えることを示した.
1.2
研究の目的
先行研究では,
LQGトレードオフ関係について近似もしくは推定をしている.そこで
本研究では上位層に経済性能最適化を下位層に制御性能最適化を持つ
2階層制御システム
において,
LQG制御であれば
,制御対象のプロセスモデルを用いて制御量の分散と操作量 の分散の理論値が計算できることに着目し,モデルより求められたトレードオフ関係を用 いて理論的に最適な重みパラメータと設定値を計算する手法を提案する。さらに,その重 みパラメータを初期値として学習アルゴリズムを適用する手法も与える.
次に,
2階層の制御性能最適化を行う下位層について変更を行う.
LQG制御では制約条 件を設定することが出来ないため,上位層の経済性能評価に制約条件を組み込んで最適化 を行った.そこで,下位層を制約条件付き
MPCにすることにより,上位層での入出力分 散のトレードオフ関係の複雑さを解消でき,制約条件内で制御性能の最適化を行へること を示す.
本論の構成は,初めに
2階層制御システムの構造について述べ,次に,
LQG基準に基 づく経済性能最適化について,制約条件付き
MPCに基づく経済性能評価について述べる.
最後に本研究のまとめをおこなう.
2 経済性能最適化を含むシステムの構造
2.1
一般的な構造
MPC
制御システムの実装において,
MPCの目的関数はシステム全体の経済効果に基 づいて決定されるべきである.これは,制御プロセスの変数に関して最適な設定値や参照 値追従を得ることを意味する.そこで,経済性能評価を行う上位層と上位層で得られた設 定値に於いて制御性能最適化を行う下位層の
2階層構造が提案された
[5].
この時,上位層における経済性能最適化のための目的関数はプラント全体の最適化を 念頭に於いて決定されなければならない.この問題について,
”Process Dynamics and Control”[7]では,その一般形式が
Latour, 1996によって示された.さらに,具体的に次 の
4つの形式が示されている.
J =E[ϑ] =
∫
yj
ϑ(yj)f(yj, µ, σ)dyj (2.1)
ここで
yjは経済性能最適化に関わる重要な変数として選択されたプロセスの出力を表す.
µ, σ
は出力の平均値と標準偏差である.
ϑ(yj)は確率密度
f(yj, µ, σ)を含む経済性能目的関 数である.企業の生産要件に応じて以下のような形式が示されている
(Edgar et al,2001).
1.
目的関数として材料や燃料費などのコストの最小化を図る.
J =
∑m i=1
Cu(i)ui (2.2)
=F1(ui, yj)D+n[F2(ui, yj) +F3(ui, yj)D] (2.3)
ここで
Dは生産量,
nは生産時間,
Fl(ui, yj)は入出力の関数である.
2.
目的関数として生産の最大化を図る.
J =
∑p j=1
Cy(j)yj (2.4)
3.
前記を統合して,生産の最大化,コストの最小化を図る.
J =
∑p j=1
Cy(j)yj−
∑m i=1
Cu(i)ui (2.5)
4.
多目的経済性能関数;多くの場合ある目的関数を最適化すると他の目的と対立する 可能性がある.たとえば,利益の最大化,汚染の減少,不適格率の最小化,最大生 産量,資源の最適使用などがあげられる.
以上のよう示された経済性能評価を基に決定された設定値に基づいて下位層では,制御量
の分散と操作量の分散を考慮した最適化が行われる.
2.2
本研究における構造
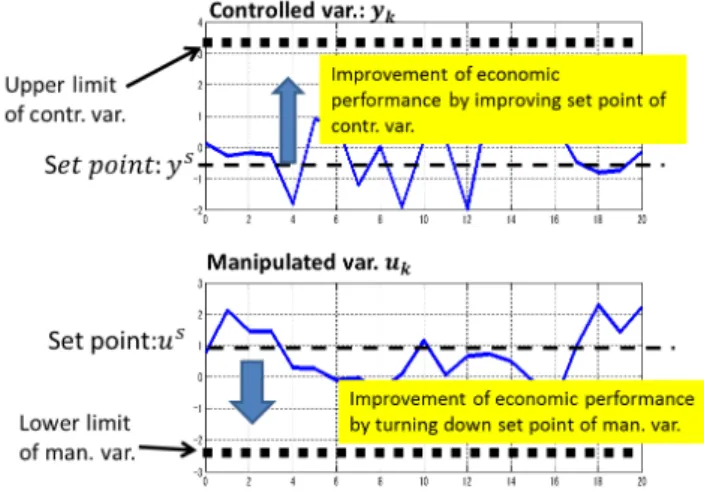
実際のプロセスシステムでは,確率的外乱は避けられずシステムの安全性や製品品質を 確保するためにも設定値はプロセスシステムの上下限値から離す必要がある.しかし,上 下限値と設定値の乖離は経済的利益を損なうものである.この時,
Fig. 2.1のように設定 値を変更することが出来れば経済性能の向上が図れる.そこで,経済性能向上のための設 定値最適化を行う上位層と,二次計画問題を用いて最適制御を扱う下位層との
2階層構造 が提案された
[5],
[6].
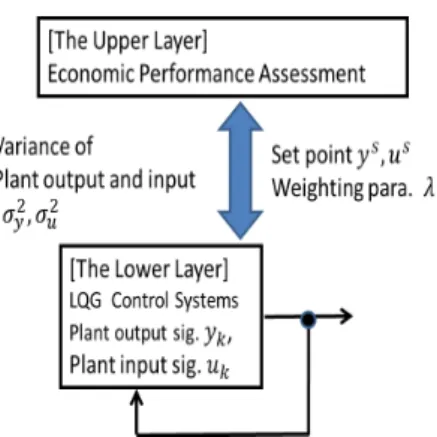
Fig. 2.2に概要を示す.ここで,
Cは制御器で,
LQGまたは
MPCである.
Pは制御対象である.
yは出力,
uは入力,
λは重みパラメータ,
σyは制御量分 散,
σuは操作量分散,
xは状態変数である.
Fig. 2.1: Image for Improvement of economic performance
この時,上位層における目的関数は経済性能最適化を目的とし
max
us,ys,σy(λ),σu(λ)J =
∑P p=1
Cy(p)yps−
∑N n=1
Cu(n)usn (2.6)
となる.なお,
Cy(p) Cu(n)は,
p番目の制御量や
n番目の操作量を経済評価値に換算する 正の係数であり操操業時における,材料,エネルギー,マンパワーなどのコストや生産品 に対する利益を示す.また,
ys, usは制御量及び操作量の設定値である.
また,下位層において制御性能最適化を目的とし
Φλ =E∥yk−ys∥Q+λE∥uk−us∥R→min (2.7)
であり,ここで,
Φは,半正定値対称行列
Q,正定値対称行列
Rによって重みづけられ た最適レギュレータの評価関数をあらわす.
以上のような
2階層制御システムに基づいて,下位層における目的関数の重みパラメー
タ
λを決定するため,入出力のデータから得た分散値を利用して経済性能最適化を行い,
Fig. 2.2: The twe-layer structure of the economic performance assessment of a control system
それによって計算された設定値と重みパラメータを下位層で利用する
.このように,経済
性能評価行う層と制御性能評価を行う層を設けその相互関係を利用しプロセスシステム全
体の最適化を行う.
3 LQG 基準に基づく経済性能最適化
3.1
背景
製造現場では省力化,環境保護,マンパワー不足などの様々な経済問題を抱えている.
このような状況下で持続的な経済利益を生み出すため,プロセス制御における経済性能評 価が必要とされているここで
,経済性能評価とは制御システムの改善による経済的メリッ トを定量的に評価することである.
主要なアプローチとして制御量の分散に着目する研究がなされている.そのアプローチ として,最小分散制御
(MVC)をベンチマークとする方法がある.この
MVCはコントロー ラの特性に関係なく,制御量分散の最小値が決まる.したがって,この最小値と実際の分 散の比を制御性能評価指数として利用することができる.
Harris indexまたは
Closed-loop potential(CLP)と呼ばれる
[2]. しかし,
MVCは出力分散のみを扱っているうえ,アク チュエータの限界への考慮もなかった。そこでこの欠点を補うため
LQG指標が
Huangら により提案された.この指標は入出力分散を考慮しているため,制御システムの性能評価 に適しているといえる.さらに,
Huangら
[3]の研究を基に,
Zhaoらはこの
LQGベンチ マークを制御システムの経済性能を評価するために拡張した
[4].
しかし,
LQGベンチマークの経済性能評価への拡張は,バックオフ問題や統計的最適 化問題を合わせて考慮しなければならなかった.特に,経済性能評価問題において,入出 力分散の関係として
LQGトレードオフ関係を組み入れなければならない.つまり,最適 経済性能を得るために,入出力分散のトレードオフ関係を含めて非線形制約問題として解 かなければならない.だがトレードオフ曲線は非対称に分布された離散点から回帰される ため,不必要な計算,精度の悪い回帰性能を生じることになる.
この問題を解決するため
Zhe[5]は
equigrid LQGベンチマークを提案した.この手法は,
重みによってパラメータ化した
LQG評価関数を考え,
LQG制御で制御対象のプロセスモ デルを用いて制御量と操作量の分散の理論値が求められる.このとき,重みパラメータを 変化させてトレードオフ曲線をプロットし,トレードオフ曲線を多項式回帰曲線として導 出することで解決を図った.
また,
Caiら
[6]は経済性能設計を行う際に,入出力分散の関係を線形問題として処理す ることを提案した.これは繰り返し学習法を用いて,各々の試行でパラメータと設計条件 を向上するものである.ここで,繰り返し学習法とは感度分析に基づいてパラメータの調 整を行うことであるが,いずれの場合もトレードオフ曲線を近似もしくは推定している.
3.2
問題の記述
本研究では,
LQG制御であれば
,制御対象のプロセスモデルを用いて制御量の分散と操
作量の分散の理論値が計算できることに着目し,モデルより求められたトレードオフ関係
を用いて理論的に最適な重みパラメータと設定値を計算する手法を提案する.さらに,そ
の重みパラメータを初期値として学習アルゴリズムを適用する手法も与える.
Fig. 3.1: The two-layer structure of the economic performance assessment of a control system
3.3 LQG
基準に基づく経済性能最適化の構造
LQG
基準に基づく経済性能最適化は
Fig. 3.1のような
2階層構造になる.上位層は,下 位層の
LQG制御によって決まる制御量と操作量の分散に基づき設定値の最適化が行われ,
下位層では,上位層で決定された設定値を基準として
LQG制御が実行される.上位層に おける経済性能評価の目的関数を以下に示す.
max
us,ys,σy(λ),σu(λ)J =
∑P p=1
Cy(p)yps−
∑N n=1
Cu(n)usn (3.1)
なお,
Cy(p) Cu(n)は,
p番目の制御量や
n番目の操作量を経済評価値に換算する正の係数 であり操操業時における,材料,エネルギー,マンパワーなどのコストや生産品に対する 利益を示す.また,
ys, usは制御量及び操作量の設定値である.次に制約条件を示す.
yps=
∑N i=1
kp,nusn (3.2)
yp,min+zαp/2σyp(λ)≤yps≤yp,max−zαp/2σyp(λ) (3.3) un,min+zαn/2σun(λ)≤usn≤un,max−zαn/2σun(λ) (3.4)
σy(λ) =F(σu(λ)) (3.5)
ここで,
(3.2)式は,
ys,usの定常的な等式関係を示し,
ki,jは定常ゲインを示す.
yj,max, yj,min, ui,max, ui,min
は,制御量,操作量の上下限値を表している。
σy, σuは,あ る区間取得されたデータに対する標準偏差である.
zαn/2は雑音を正規分布であると仮定 したとき,制御量や操作量の上下限値の
100(1−αn)%の信頼区間になるように定めた閾 値である.
(3.5)
式は,重みパラメータ
λによってパラメータ化された
LQG制御系において目的関
数
Φを最小化することで得られる
,制御量分散と操作量分散のトレードオフ関係を表して いる.ここで,
Φは,半正定値対称行列
Q,正定値対称行列
Rによって重みづけられた最 適レギュレータの評価関数をあらわす.
Φλ =E∥yk−ys∥Q+λE∥uk−us∥R→min (3.6)
ここで,下位層において設定値からの偏差量に対して白色雑音を含む以下のシステムモデ ルを考える.
˜
xk+1 =A˜xk+Bu˜k+Dwk (3.7)
˜
yk =Cx˜k (3.8)
ここで,
y˜k=yk−ys,u˜k=uk−usで設定値からの偏差量を表し,
wkは白色雑音である.
このモデルに対して離散時間リカッチ代数方程式を用いて次の状態フィードバック制御則 が表される.
˜
uk=−Fλx˜k
(3.9)
Fλ= (λR+BTPλB)−1BTPλA (3.10)
ここで
Pλ =ATPλA+Q−ATPλB(BTPλB+λR)−1BTPλA (3.11)
である。以上の経済性能最適化において,本研究で行ったトレードオフ関係の導入法につ いて示す.
3.4
経済性能最適化におけるトレードオフ関係の導入法
LQG
制御系における制御量の分散と操作量の分散の関係は重みパラメータ
λの値によっ て変動し,
Fig. 3.2のようなトレードオフ曲線となる.すなわち,経済性能最適化はトレー ドオフ曲線上のどの
λの値によって制御量の分散と操作量の分散が最適になるのかを決定 することである.したがって,経済性能評価問題では
,トレードオフ曲線を制約条件にし て最適化問題を解く必要がある.しかし,先行研究では,重みパラメータ
λを変化させて トレードオフ曲線をプロットしトレードオフ曲線
σy(λ) =F(σu(λ))を表す多項式回帰曲 線の導出を行ったり,線形計画の感度分析と学習アルゴリズムを導入することによって,
トレードオフ曲線を制約式として利用することなく経済性能最適化計算を行うものであっ た.これに対し,本研究では制御量分散と操作量分散をそれぞれ重みパラメータを用いて 記述しそれらを等式制約条件に用いて最適化計算を行う.
Fig. 3.2: The trade-off curve
(3.7)
式,
(3.8)式のシステムに対して,最適レギュレータ
(3.9)式,
(3.10)式,
(3.11)式 を適用したときの閉ループ系は,
˜
xk+1 =Ac,λx˜k+Dwk, Ac,λ=A−BFλ (3.12)
となる。このとき,
Ac,λが安定行例,
wkが白色雑音であることに注意すると,状態ベク トルの共分散行列
E[xtxTt]は,
E[xtxTt] =
∑∞ k=0
Akc,λDW DT(ATc,λ)k (3.13)
となる.この状態ベクトルの共分散行列の理論値は,さらに離散時間
Lyapunov方程式を 用いてモデルを用いて求めることができる.
(3.13)式 の右辺を
Πλとおくと,
Πλは,次 の離散時間
Lyapunov方程式の解となる.
Ac,λΠλATc,λ+DW DT = Πλ (3.14)
このことは,
Πλ−DW DT =
∑∞ k=0
Akc,λDW DT(ATc,λ)k−DW DT
=
∑∞ k=1
Akc,λDW DT(ATc,λ)k
=Ac,λΠλATc,λ (3.15)
から示すことができる.さらに,
Πλを用いて
[σy,12 . . . σy,p2 ] = diag[Ey˜ky˜Tk]
= diag[
CΠλCT]
(3.16) [σu,12 . . . σ2u,m] = diagEu˜ku˜Tk = diag[FΠλFT] (3.17)
と表すことができる.
このように
,制御量分散と操作量分散の関係については,直接関係づけることは困難で あるが
,制御量分散と操作量分散をそれぞれ重みパラメータを用いて記述することでそれ らを等式制約条件に用いて最適化計算を行うことが可能になる.
この関係を用いることで経済性能評価に基づく重みパラメータの最適化を行う.さらに,
Cai
らの学習アルゴリズムの手法に決定された重みパラメータ
λを初期値として用いる.
この方法を用いることにより,モデルベースの
LQG制御則を前提とする制御量と操作量
のトレードオフ関係が変動した場合でも
,その変動分を
Caiらの手法である学習アルゴリ
ズムを用いて補償することができ,さらなる経済性能評価の向上が図れることを示す.そ
こで
,以下に
Caiらの方法の概略を示す.
3.5
学習アルゴリズムに基づく経済性能評価
(Caiの手法
)Cai
らは,以下に示すように上位の経済性能評価に基づき下位のモデル予測制御
(MPC)の評価関数の重みパラメータと設定値を調整する手法を提案した.この問題は,制御量と 操作量が指定された信頼度で上下限値の範囲に入ることを制約条件とする。経済性能評価 の最大化問題として定式化されるので,下位の
MPCにおける入出力データの分散に関す るトレードオフ曲線が制約条件として必要となる.しかし,一般的に解析的にトレードオ フ曲線を求めることが難しいうえ,非線形の制約条件となるため,最適解の導出が難しく なる.
Caiら
[6]は,この問題に対し繰り返し学習法を導入した手法を提案した.まず
1.
ある一定区間,
MPCによる定値制御データを集め,それによって現時点での重みパ ラメータによる 制御量と操作量の分散を求める.
2.
データにより求めた分散を用いて,上位の経済性能評価の最大化問題で設定値を決 定変数とする線形計画問題として定式化する.
3.
前ステップで設定した線形計画問題において,操作量の分散と制御量の分散を ど のように変化させると目的関数が増大するかを線形計画法の感度分析を利用して求 める.
4.
経済評価を増大するための操作量の分散と制御量の分散の変化の方法を利用して,
MPC
の重みパラメータを調整する.
5.
新しく設定された重みパラメータおよび設定値を用いて
MPCを構成し,定値制御 データを集める.以下,
1.に戻り,重みパラメータや設定値が収束するまで繰り 返す.
のような手順をとする.このように繰り返し設計法によって,本質的には非線形計画問題 となる最適化問題を線形計画法を繰り返すことによって求めることが可能となっている.
以下に具体的な方法を示す.
Fig. 3.3: Economic performance assessment for MPC
まず経済性能評価の目的関数の意義は,下層の制御量分散と操作量分散のトレードオフ
関係の下である操作量にたいして最大限の制御量を得ることである.よって,
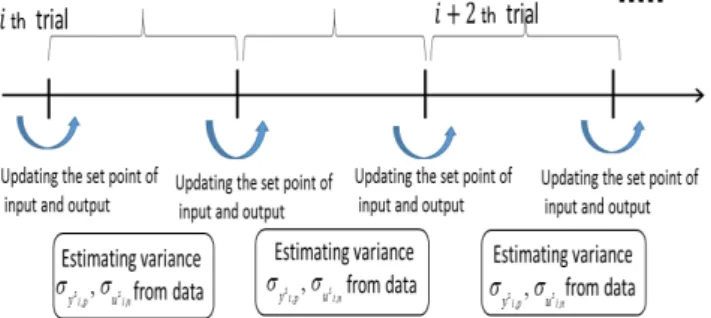
(3.18)式を
用いて第
i試行から第
i+ 1試行までの設定値の変動分を最適化する.その評価関数は以
下の通りである.
∆umaxs,∆ys∆Ji =
∑P p=1
Cy(p)∆yi,ps −
∑N n=1
Cu(n)∆usi,n (3.18)
なお,
Cy(p),
Cu(n)は,経済性能評価を行わせるために変換した正の値であり,また
ys, usは設定値である.
∆ys,
∆usは,
ys, usからの変化量を表している.制約条件は以下の通り である.
∆yi,ps =
∑N n=1
knp∆usi,n (3.19)
uminn +zαn/2σusi,n −usi,n≤∆usi,n
≤umaxn −zαn/2σusi,n −usi,n (3.20) ypmin+zαn/2σys
i,p −yi,ps ≤∆ysi,p
≤ypmax−zαn/2σysi,p−yi,ps (3.21)
ここで,
ymax, ymin, umax, uminは,制御量,操作量の上下限値を表している.
zαn/2は,閾 値である。
σy, σuは,ある区間取得されたデータに対する標準偏差である.雑音が正規分布 であると仮定すると,制御量や操作量の上下限値が,それぞれ
∆ys,
∆usの
100(1−αn)%の信頼区間にあることを示している.
0≤|∆usn|≤∆umax (3.22)
0≤|∆yns |≤∆ymax (3.23)
よって,線形の制約条件に帰着できるので,上式を
A∆usi ≤biとおく.ここで,
Aは,各 試行時での定常ゲインであり,
(3.19)式,
(3.20)式,
(3.21)式 より,次のように示される.
A= [IN,−IN,
∑N n=1
knl. . .−
∑N n=1
knp. . .]T (3.24)
また,ラグランジェ乗数
βを用いて,
KKT条件のもとで制約条件は次のように示される.
∇Lu(u∗, β∗) =−c+ATβ∗ = 0 (3.25)
b−Au∗ ≥0 (3.26)
β∗ ≥0 (3.27)
β∗T(b−Au∗) = 0 (3.28)
これによって,各試行ごとに,線形計画問題として最適化を行い感度分析を適用し,この 線形計画問題を解決する.例えば,
A∆usi ≤bi + ∆biのように右辺が変動した際,経済 性能が改善するかを検討する.
∆biには,制御量分散、操作量分散の変動量が含まれてい る。ここで,経済性能評価関数
max ∆Ji =cT∆u2iを ラグランジェ乗数
βを用いて,式変 形を行い,つぎの式を導出する.
∆Ji= (β+ ∆β)T∆bi (3.29)
第
i試行の線形問題を解くと同時に
βを求め,その最大値を利用して,
MPCの重み係 数
λの更新に利用する.以下に方法を述べる.
Bu= maxβn (3.30)
By = maxβp (3.31)
λi+1 =λi+l(ηi.λi)ηi (3.32)
ηi =
1, Bu >0 andBy = 0
−1, Bu = 0 and By>0 0, Bu >0 and By>0 0, Bu = 0 and By= 0
(3.33)
l(ηi, λi) = {
l1λi, l1 >1 (if ηi= 1)
l2λi, 0< l2 <1 (if ηi=−1) (3.34)
この時,
Bu >0, By = 0であれば,操作量分散を小さくする必要があるので,
λを大きく する一方 .
Bu = 0, By >0であれば,制御量分散を小さくする必要があるので,
λを小さ くする.
以上を用いて
λの重み係数を変更して経済性能評価を更新する。このように繰り返し 設計法によって,本質的には非線形計画問題となる最適化問題を線形計画法を繰り返すこ とによって求めることが可能となっている.
3.6
数値例
3.6.1
分離プロセスシステム
2入力
2出力
Cai
ら
Fig. 3.4に示した
2入力
2出力の分離システムを例題とし,本論における特徴を 示す.このプロセスでは,操作量は還流量
u1とスチーム流量
u2であり
,制御量は蒸留生 成物
y1と底部生成物
y2である。外乱は
Feedの変動
wであり,平均零,分散
1の白色過 程で記述されているとする.
1以下の伝達関数行列によってプロセスはモデル化されたとし,サンプリング時間は
1分 とする.
[y1
y2
]
=
[ 2.56e−s
16.7s+1 −5.76e−3s 21s+1 1.32e−7s
10.9s+1 −5.82e−3s 14.4s+1
] [ u1
u2
] +
[ 3.8e−8s 14.9s+1 4.9e−7s 13.2s+1
]
w (3.35)
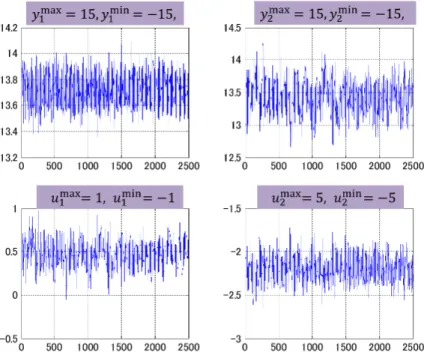
さらに,制御量と操作量には次のような制約があり
,経済性能最適化は,これらの制約
条件を
99.7%の信頼度を満足しながら蒸留生成物の生産量
y1を最大化する.
−15≤y1 ≤15,−15≤y2 ≤15 (3.36)
−1≤u1≤1,−5≤u2 ≤5 (3.37)
ここで,例題に対する経済性能最適化問題は
,以下のようにまとめられる.
1R.K.wood and M.W.Berryモデル[11]
Fig. 3.4: Two-input and two-output separation process
•
上位層:経済性能評価目的関数は,文献
[6]と同様に,
λ,y1s,ys2,us1,us2max,σy1,σy2,σu1,σu2
J =y1s (3.38)
となる設定とした。これは生産量
y1sの最大化が利益に貢献すると考えられるためで ある.制約条件における
,定常状態の条件は,
[ y1
y2
]
= [
2.56 −5.76 1.32 −5.82
] [ u1
u2
]
(3.39)
となり,さらに
,正規分布を仮定した場合の
99.7%の信頼度で制約条件を満足する式 は以下のようになる.
ymin1 + 3σy1(λ)≤ys1 ≤y1max−3σy1(λ) (3.40) ymin2 + 3σy2(λ)≤ys2 ≤y2max−3σy2(λ) (3.41) umin1 + 3σu1(λ)≤us1 ≤umax1 −3σu1(λ) (3.42) umin2 + 3σu2(λ)≤us2 ≤umax2 −3σu2(λ) (3.43)
ここに下位層より得られる制御量分散と操作量分散の重みパラメータ
λとの関係式 を制約条件に含めて経済性能評価問題を解く。重みパラメータと制御量分散と操作 量分散の等式制約条件は以下に示す.
[σy,12 . . . σy,p2 ] = diag[CΠλCT] (3.44) [σ2u,1. . . σ2u,m] = diag[FΠλFT] (3.45)
•
下位層:
LQG制御プロセスシステムをサンプル時間
1 minで離散時間化し,各々の
状態区間モデルを導出する.さらに,最小次元化したモデルと外乱の拡大状態空間
Fig. 3.5: Simulation results in case of optimized wighting parameters based on economic performance assessment (EPA)
モデルを導出し,
2入力
2出力,
31次元の状態変数を持つ状態空間モデルとした.評 価関数は
Φλ =E∥yk−ys ∥Q+λE∥uk−us∥R (3.46)
であり,この時の重み行列は,結果に於いて文献
[6]との比較を容易にするため同様 の値とした.
Q= [
10 0 0 1
]
, R= [
3 0 0 3
]
(3.47)
この
LQG制御系の離散時間リカッチ方程式の解
Πλを用いることで
,制御量分散と 操作量分散の重みパラメータ
λとの関係式,
(3.44)式,
(3.45)式 が 与えられる。
ここで,最適化計算は,
MATLAB optimization toolboxの
fmincon.mを用いて実行した.
3.6.2
結果:
LQG制御系
最適計算の結果,重みパラメータ
λは
0.9931となり,この時の経済性能評価値は初期
値
ys1 = 0.975に対して
13.715に向上した.この重みパラメータのトレードオフ曲線上の
位置を確認するために,
2変数からなる制御量の分散と操作量の分散をスカラー化し重み
パラメータ
λを変化させてプロットした.このとき,経済性能最適化された重みパラメー
タがトレードオフ曲線上の点に配置されていることが確認された.ここで,経済性能最適
化後のシミュレーション結果を示す.
Fig. 3.5に示されるように制御量
,操作量ともに制約
条件を満足する範囲で設定値周りで変動していることが確認できた.
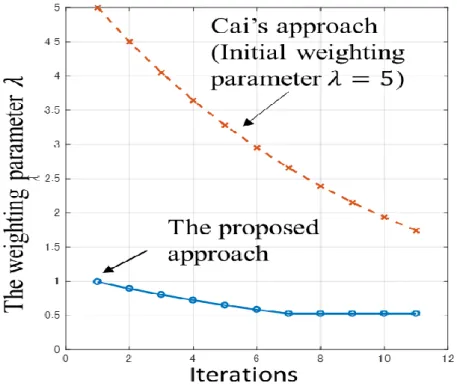
Fig. 3.6: The weighting parameter
λ
adjustment in cases of both the proposed and the Cai’s approach.3.6.3
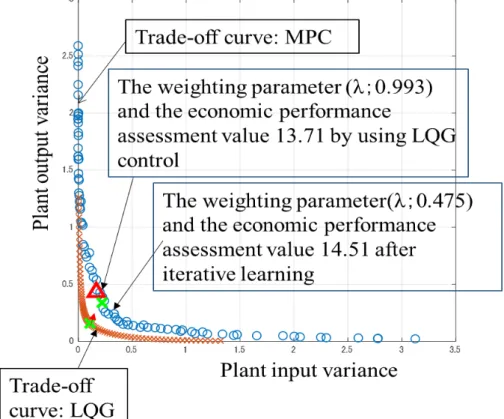
結果:
MPC下位層に
LQG制御を用いた経済性能評価において得られた重みパラメータ
λを初期値 に用いて下位層に
MPCで経済性能評価を行った.この時システムモデルが変動した場合 を考え,提案法の有効性と実用性を示す.システムモデルは
˜
xk+1 =A˜xk+Bu˜k+Dwk (3.48)
˜
yk =Cx˜k (3.49)
とし,
B⇒0.5Bに変動したとする.
LQG制御系で求めた重みパラメータ
λを初期値 として
,MPCで学習アルゴリズムを適応した結果を
Fig. 3.7に示す
.△は
LQG制御則で決 定した重みパラメータでの最適値を示す.さらに
,学習アルゴリズムを適用した結果は
×で,最適値は
J = 13.71から
14.51となり経済性能が向上したことが示せた.
さらに,
Fig. 3.6に示されるように重み係数の初期値にモデルベースの
LQG制御則を前
提とした最適重みパラメータを設定した場合としない場合について学習アルゴリズムを適
用した結果を示している.いずれの場合も同様の学習アルゴリズムを用いているが初期重
み設定による提案法は経済性能最適化への繰り返し回数の削減が実現できることを示せた.
Fig. 3.7: The comparison result of
λ
adjustment between the proposed method and the Cai’s approach.4 制約条件付き MPC に基づく経済性能最適化
4.1
背景
前章の
LQGは広く実応用されてきた.しかし,プロセス産業の分野では大きな広がり はなかった.要因としては,制約条件を加味できない.プロセスモデルの非線形化に対応 できない.正確なモデルを必要とするなどである.プロセス産業にとって必要な制御器は 違反することのないぎりぎりで制約条件を満足することである.さらに,現在ではシステ ムが複雑化し多変数化している.そこで新しい制御技術として
MPCが開発された
[8].
4.2 MPC
model predictive control (MPC)
は,複雑な多変数制御問題に関する高度制御技術であ る.概要は多入出力の制約条件を満足しながら,その入出力を制御するものである.その 特徴を以下に示す.
1.
プロセスモデルは入出力と外乱の動的で確率的関係を捉えることが出来る.
2.
入出力における制約条件を制御設計の中に取り入れることが出来る.
3.
制御計算は最適設定値を用いて調整することが出来る.
4.
正確なモデル予測は潜在的問題の早期警告を可能にする.
5. MPC
が高度な制御を実現するためには正確なプロセスモデルを必要とする.
歴史的には
1970年代に開発され制約条件の中で多変数制御問題を解決出来るため広く 産業界に浸透した.
MPC制御の目的は入出力制約の違反の阻止をおこないながら,出力 変数を最適な設定値に近づけるものである.
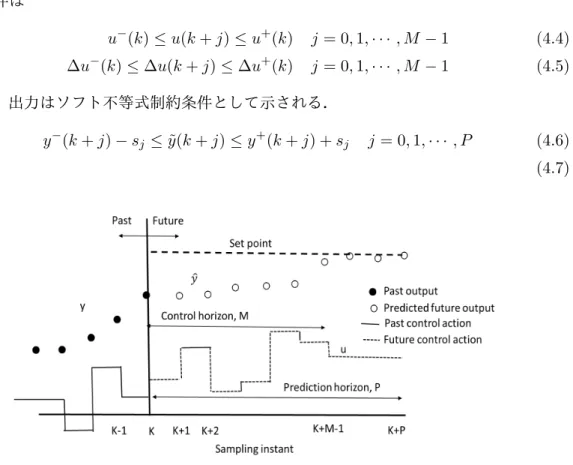
MPCの計算方法については,現在の測定値 と出力の予測値を基にし.予測された値が最適な設定値になるように制御則を決定するも のである.つまり,現時刻を
kとし,入力
u(k+i−1)i = 1,2,…
.Mを考える.この セットは現在の入力と
M −1 の将来の入力の組である.入力は
Mセット先で定常であ るとする.入力は予測される出力
y(kˆ +i)(i= 1,2,…
.., P)が最適設定値に到達するよう に計算される.制御計算は,目的関数を最適化するようになされる.ここで,
Pを予測区 間,
Mを制御入力区間とよぶ.
M個の制御則が計算されるが,最初の1つ目だけが実装 される.その後,
k+ 1を新たな時刻として同様の事を繰り返し行う.
Fig. 4.1はその概念 図である.
4.2.1
制約条件のない
MPC制御計算法を示すため,制約条件を持たない特別な場合について述べる.上記に述べた
通り
MPCの制御計算は現在の測定値とモデル予測を基に計算されるものである.制御の
目的は出力を出来る限り目標値に近づけるための操作量を決定することである.その制御
計算は,参照軌道からの予測された偏差を最小化することに基づいている.まず,k を現
在のサンプル時間とする.
MPCの制御則の計算は操作量の変動Δ
U(k)を計算することで
ある.目的関数が最小になるように,線形あるいは二次計画問題として解かれる.この時 の目的関数は
min
∆U(k)J = ˆE(k+ 1)TQE(kˆ + 1) + ∆U(k)TR∆U(k) (4.1)
である.ここで,
E(kˆ + 1)は予測された偏差ベクトル,
Qは重み正定行列,
Rは重み半正 定行列である.これによって
MPCの制御則が以下のように解析的に決定される.
∆U(k) = (STQS+R)−1STQEˆ0(k+ 1), Kc≜(STQS+R)−1STQ (4.2)
=KcEˆ0(k+ 1) (4.3)
ここで
Kcはゲイン行列,
Eˆ0(k+ 1)は予測された参照軌道との偏差ベクトルである.
4.2.2
制約条件のある
MPC入出力変数における不等式制約は
MPCに関して重要な特徴である.入力の制約条件は プラント設備に於いて物理的限界があるため生じる.出力変数の制約条件はプラントを操 作する上でカギとなる要素である.例えば,蒸留層の制御目的は生産量を最大化すること である.その際,品質を満足させながら,起こって欲しくない冠水や漏水を避ける必要が ある.不等式制約条件は制御計算に含むことが出来る.不等式制約条件には,必ず守らな ければならないハード制約と,多少の違反の余地があるソフト制約がある.入力の不等式 制約条件は
u−(k)≤u(k+j)≤u+(k) j= 0,1,· · ·, M −1 (4.4)
∆u−(k)≤∆u(k+j)≤∆u+(k) j= 0,1,· · ·, M −1 (4.5)
であり,出力はソフト不等式制約条件として示される.
y−(k+j)−sj ≤y(k˜ +j)≤y+(k+j) +sj j= 0,1,· · · , P (4.6) (4.7)
Fig. 4.1: Basic concept for model predictive control
Fig. 4.2: Image of structure for two- layers
ここで,
sjはスラック変数である.この不等式制約条件の導入は線形あるいは二次計画問 題を使用して制約付き最適化問題を数値的に解くことを可能にした
[7],
[10],
[12].
4.3
問題の記述
本研究では,制御システムにおいて
Fig. 4.2に示されたような制御性能の向上と経済性 能評価を行う
2階層構造を特徴としている.上位層での目的関数は
ys,umaxs,σy,σu
J =
∑P j=1
Cy(j)yjs−
∑N i=1
Cu(i)usi (4.8)
であり,出力は生産量を入力はプロセスを動かすエネルギー要因とする.この時,
Cy(j)は 区間当たりの生産量,
Cu(i)は区間当たりのエネルギーコストなどの正の係数である.この 目的関数によって,制御プロセスによる利益を総合的に判断し,設定値
(ys)の向上を図る ものである.
この上位層によって最適化された設定値の基,下位層では与えられた設定値周辺の外乱 に対して制御変数と操作変数の定値制御が行われる.前章では下位層に
LQG制御が適用 されたため,下位層で制約条件を設定できず,さらに上位層に於いては入出力の分散の関 係(トレードオフ関係)を考慮した制約条件を必要とした.
そこで,本研究ではまず,上位層に制約条件を付けず下位層に制約条件付き
MPCを用 いた.以下の
Fig. 4.3に概要を示す.この下位層を制約条件付き
MPCに変更することに より上位層での入出力分散のトレードオフ関係の複雑さを解消できる.上述した通りシス テムの構造は
2階層になっており,その上位層の目的関数は
(4.8)式 であり,制約条件は ない.
また,下位層における目的関数は
Jt=E
[t+N∑−1
k=t
(yk+1T Qyk+1+λuTkRuk) ]
(4.9)
Fig. 4.3: Image for objective of the study
である.
この時,制約条件は,
ysj =
∑N i=1
ki,jusi (4.10)
yj,min+zαj/2σy,j(λ)≤ysj ≤yj,max−zαj/2σy,j(λ) (4.11)
ui,min ≤usi ≤ui,max (4.12)
である.ここで,
(4.10)式は制御変数と操作変数の定常状態の関係を示す.
(4.11)式は制 御変数のソフト不等式制約条件であり
(4.12)式は操作変数のハード制約条件である.こ の時
ki,jは定常ゲイン,
zαj/2は
100(1−αj/2)%の標準正規分布における有効水準点で ある.
さらに,
2階層構造の相互関係から経済性能最適化を図るため,下位層の制約条件を考 慮した上位層における目的関数の設定について検討を行う.
4.4
下位層における制約条件付き
MPC下位層に確率的
MPCを導入する.そこで,
Nステップのプラントの状態方程式,
xk+1 =Aexk+Beuk+Eewk (4.13)
を考える.初期状態は
x=Φx0+ΓuU+ΓwW (4.14)
である.この時
Φ=
Ae A2e ... ANe
(4.15)
Γu =
Be 0 · · · 0 AeBe Be 0 ... ... . .. . .. 0 ANe Be · · · AeBe Be
(4.16)
Γw =
Ee 0 · · · 0 AeEe Ee 0 ... ... . .. . .. 0 ANe Ee · · · AeEe Ee
(4.17)
U =
uk uk+1
... uk+N−1
W =
wk wk+1
... wk+N−1
(4.18)
である.
この時,下位層の目的関数は
J =
N∑−1 k=0
(yk+1T Qyk+1+λuTkRuk) =
N∑−1 k=0
(xTk+1CeTQCexk+1+uTk(λR)uk) (4.19)
=
xk+1 xk+2
... xk+N
T
CeTQCe 0 · · · 0 0 . .. 0 ... ... . .. ... 0 0 · · · · CeTQCe
xk+1 xk+2
... xk+N
+
uk uk+1
... uk+N−1
T
λR 0 · · · 0 0 . .. 0 ... ... . .. ... 0 0 · · · · λR
uk uk+1
... uk+N−1
(4.20)


![Fig. 3.4: Two-input and two-output separation process • 上位層:経済性能評価目的関数は,文献 [6] と同様に, λ,y 1 s ,y s2 ,u s1 ,u s2 max,σy1 ,σ y 2 ,σ u 1 ,σ u 2 J = y 1 s (3.38) となる設定とした。これは生産量 y 1 s の最大化が利益に貢献すると考えられるためで ある.制約条件における , 定常状態の条件は, [ y 1 y 2 ] = [ 2.56 −5.761.32](https://thumb-ap.123doks.com/thumbv2/123deta/10132183.1966071/15.892.275.608.156.451/FigTwoinput上位層経済性能評価目関数文献同様λとなるられるおける.webp)