Partial Differential Equation Approach and
Convolutional Neural Network Approach to Image Processing and Its Application
著者 モハマド ハフィズ
著者別表示 Mochammad Hafiizh journal or
publication title
博士論文本文Full 学位授与番号 13301甲第5005号
学位名 博士(理学)
学位授与年月日 2019‑09‑26
URL http://hdl.handle.net/2297/00056474
Creative Commons : 表示 ‑ 非営利 ‑ 改変禁止 http://creativecommons.org/licenses/by‑nc‑nd/3.0/deed.ja
Dissertation
Partial Differential Equation Approach and Convolutional Neural Network Approach to Image Processing and Its
Application
Graduate School of
Natural Science & Technology Kanazawa University
Division of Mathematical and Physical Science
Student ID No. 1624012013
Name Mochammad Hafiizh
Chief Advisor Prof. Seiro Omata
28 June 2019
博士論文
偏微分方程式と畳み込みニューラルネットワー ク を用いた画像処理とその応用
金沢大学大学院自然科学研究科 数物科学専攻
小俣研究室
学籍番号
1624012013
氏名 モハマドハフィズ 主任指導教員氏名 小俣正朗
”..., Allah will raise those who have believed among you and those who were given knowledge, by degrees. And Allah is Acquainted with what you do.”
(Al-Mujadila: 11)
Acknowledgements
First of all, I would like to express my deepest gratitude to the God of the universe, Allah subhaanahu wata’aala, for giving me strength, patience, and ability to finish and complete this doctoral thesis.
The second is I would like to say thank you very much to Prof. Seiro Omata for accepting me to be his student, giving me an interesting and challenging research problem, and guiding me to think, discuss, and complete this research. Because of him, I am able to apply the scholarship to LPDP and then continue my study at the beautiful university:
Kanazawa University, in a great country: Japan. I really love this city.
The third is I would like to mention here that this study is fully supported by LPDP (Lembaga Pengelola Dana Pendidikan). This is the most important.
I would like to express my thankfulness to Norbert Pozar. He gave me many advice and suggestion during the discussion time.
Last, I would like to say thank you to my beloved grandparents (Haji Kalim and Misna), my beloved parents (Hadi Suwarno and Romlah), my beloved wife (Ana Rofiati), my beloved daughter (Alya Khaira Ziyadah), Omata-lab members (especially Yoshiho-san and Koide-san), and all my dear friends for keeping supporting me during the difficult time. Because of them, I have a reason never to give up.
The least, thank you very much to Kanazawa University, Universitas Negeri Malang, Kementerian Keuangan, Kementerian Riset Teknologi dan Pendidikan Tinggi.
ii
Abstract
The study on image processing has been discussed. It covered mainly the image classifi- cation. The focus of this study is the capillaries of human fingertips which were reported give important information about the healthiness. The purpose of this research is to judge the status of images by (i) the partial differential equation (PDE) approach and (ii) the convolutional neural network (CNN) approach according to medical motivation.
The base of the PDE approach is the active contour method, the estimation of curvature, and Fourier transform. The output of the first approach is either straight or wiggly, but the more details explanation cannot be added. For the second approach, the output is not only straight or wiggly but also several abnormal patterns of the capillaries.
In this study, we report on training an image classifier implemented as a convolutional neural network (CNN) to judge the state of human capillaries from microscope pho- tographs. This work is motivated by medical research that suggests that their shape and other features are linked to other health measures. Instead of medical doctors di- agnosis and therefore to possibly lower the cost and consistency of the diagnosis, we propose a CNN classifier. To overcome the difficulty of obtaining a large number of training images, we utilize the transfer learning approach. We base our model on a pre- trained VGG16 model for the lower layers of the network and our implementation uses Python and the Torch library. Ab-normal types of capillaries are divided into several patterns and appropriate pre-processing is performed including the PDE approach. The trained CNN has been applied to real capillary patterns to verify its performance.
iii
Contents
Acknowledgements ii
Abstract iii
Table of Contents iv
List of Figures vi
1 Introduction 1
1.1 Image . . . 1
1.2 Capillaries . . . 2
2 Partial Differential Equation Approach on Edge Detection and Its Classification 7 2.1 Edge Detection . . . 7
2.1.1 Gradient method . . . 7
2.1.2 Active contour method . . . 9
2.1.2.1 Basic formulation . . . 9
2.1.2.2 Level-set formulation . . . 10
2.1.2.3 Gradient descent method . . . 12
2.2 Estimation of Curvature . . . 12
2.3 Analysis Using Fourier Transform . . . 14
3 Convolutional Neural Network Approach 17 3.1 Neural Networks . . . 17
3.1.1 Loss function . . . 19
3.2 Convolutional Neural Networks . . . 20
3.3 Transfer Learning . . . 21
3.4 The Proposed Model . . . 22
4 Application on the Image of the Capillaries 26 4.1 Partial Differential Equation Approach . . . 26
4.2 Convolutional Neural Network Approach . . . 33
4.3 Conclusion . . . 36
iv
Contents v
Bibliography 40
List of Figures
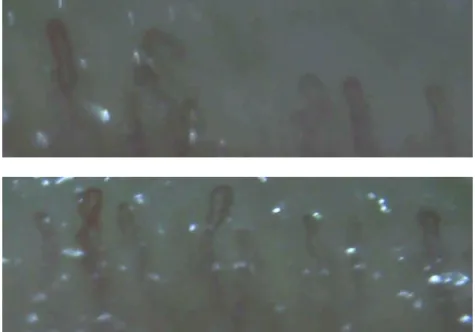
1.1 The left image is (256 ×512) -color image taken by a camera in the festival of Hyakumangoku at Kanazawa, 2019. Its decomposition with respect to the red, green, and blue channel are shown in the right. . . 2 1.2 The image of capillaries taken by a microscope. The upper and below
images are taken from different fingertips. . . 3 1.3 The images of artificial capillaries for the straight (left) and wiggly (right). 4 2.1 The summary of the PDE approach to judge the image. . . 8 3.1 A sample of N-layers neural networks. The circle or node indicates the
perceptron. . . 18 3.2 The first 37 layers of the model of VGG16. . . 23 3.3 The flow chart of the second approach. The proposed model is in the
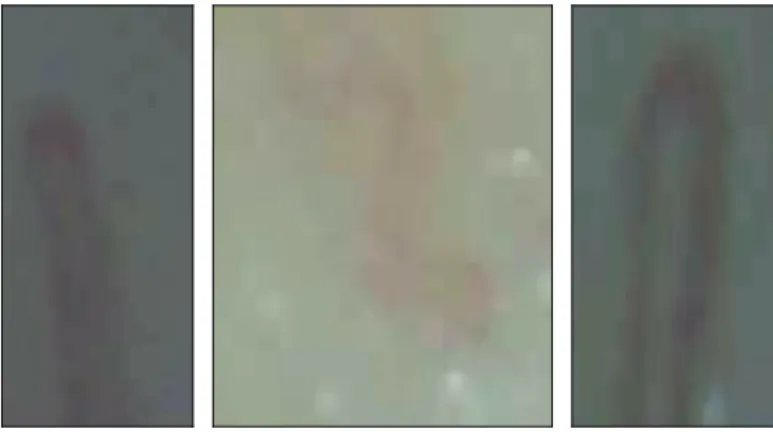
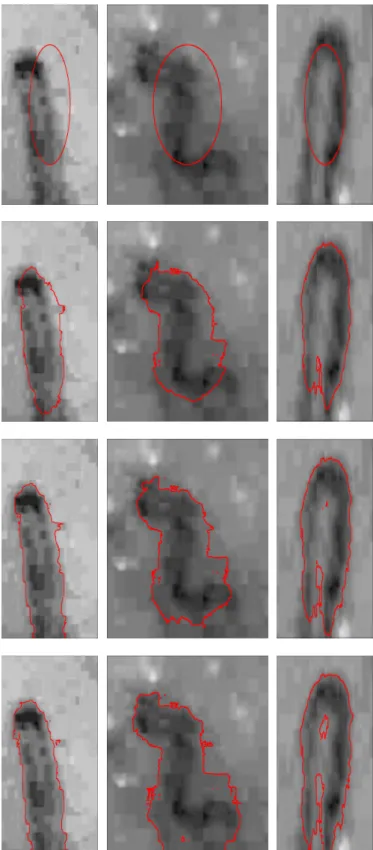
dashed rectangle. . . 24 4.1 The three selected images of capillary taken by a microscope. . . 26 4.2 The evolution of the given curve (red) on the given three different images
to detect the edge of the capillary. From top to below images show the iteration: 0, 20, 70, 150 except the lowest middle image which is the result of iteration 10,000. This image needs more iteration since the curve keep evolving at iteration 150. . . 28 4.3 The red curve (first column) is the outer edge of the capillary while the
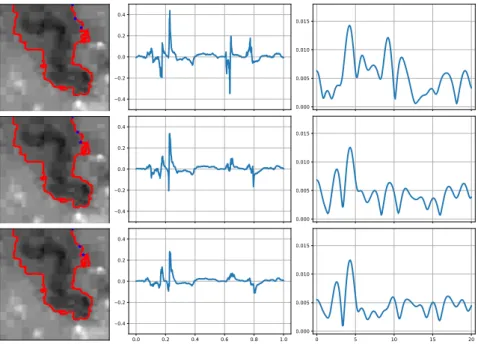
blue star is the first three points to calculate the curvature. From upper to below, the distance of these points is longer. The middle and the third column shows the curvature and the magnitude of the Fourier transfor- mation. . . 29 4.4 The red curve (first column) is the outer edge of the capillary while the
blue star is the first three points to calculate the curvature. From upper to below, the distance of these points is longer. The middle and the third column shows the curvature and the magnitude of the Fourier transfor- mation. . . 29 4.5 The red curve (first column) is the outer edge of the capillary while the
blue star is the first three points to calculate the curvature. From upper to below, the distance of these points is longer. The middle and the third column shows the curvature and the magnitude of the Fourier transfor- mation. . . 30
vi
List of Figures vii 4.6 The red curve (first column) is the outer edge of the capillary while the
blue star is the first three points to calculate the curvature. From upper to below, the distance of these points is longer. The middle and the third column shows the curvature and the magnitude of the Fourier transfor- mation. . . 31 4.7 The red curve (first column) is the outer edge of the capillary while the
blue star is the first three points to calculate the curvature. From upper to below, the distance of these points is longer. The middle and the third column shows the curvature and the magnitude of the Fourier transfor- mation. . . 31 4.8 The red curve (first column) is the outer edge of the capillary while the
blue star is the first three points to calculate the curvature. From upper to below, the distance of these points is longer. The middle and the third column shows the curvature and the magnitude of the Fourier transfor- mation. . . 32 4.9 The red curve (first column) is the outer edge of the capillary while the
blue star is the first three points to calculate the curvature. From upper to below, the distance of these points is longer. The middle and the third column shows the curvature and the magnitude of the Fourier transfor- mation. . . 32 4.10 All of the hand-drawn images are in 3 blocks: Training, Validation, and
Test. The first row of each block is labeled by straight while the second row of each block is wiggly. . . 34 4.11 The result of the process of the updating parameters of the first CNN
model. . . 34 4.12 Some images in the test dataset. The incorrect classification is shown in
the second row while the correct classification is shown in the first row. . 35 4.13 The results of the first CNN model when it is applied to the images of
capillary taken by a microscope. . . 35 4.14 The result of the process of the updating parameters of the model. . . 36 4.1 The accuracy and loss of each category from the second CNN model. . . . 37 4.15 The results of the second CNN model applied to the images of capillary
taken by a microscope. The score in each category is presented by the
horizontal bar next to each image. . . 38
Chapter 1
Introduction
The content of this chapter describes a brief explanation of the image. For detail obser- vation, the image of the capillaries is chosen as the main topic discussion.
1.1 Image
One of the main topic discussions of this research is a digital image. An image is the visualization of an object. It is the output of some devices, for example, cameras, microscopes, etc. Those devices see images as the collection of numbers which can be a matrix of two or three dimensions. The most appropriate way to see the image is as a function.
Let f : Ω ⊂ R
2→ R
nwhere Ω is open, bounded, and rectangular domain, n ∈ N.
If n = 1, it is called a monochrome, a grayscale, or a brightness image. If n = 3, then it is a color image. The most well-known color image is an RGB image. RGB is the abbreviation of red green and blue which forms the basis for the other colors. An example of this RGB image and their decomposition is shown in the right and the left of Figure 1.1 respectively. The color image is the main focus on chapter 3, while chapter 2 focuses on the brightness image.
One categorizes an image to be static or dynamic. The static image does not change with respect to the time. Otherwise, it is a dynamic image. The dynamic image is well-known as a video. The image in this study refers to the static image.
Numbers f (x), where x ∈ Ω, is called a pixel value. If the image is monochrome, then the pixel values represent the brightness level. This pixel value is a nonzero integer up to 2
m− 1 for some m ∈ N. When m = 1, it is well-known as the black and white image
1
Chapter One 2
red channel
blue channel
Figure 1.1: The left image is (256× 512) -color image taken by a camera in the festival of Hyakumangoku at Kanazawa, 2019. Its decomposition with respect to the red, green,
and blue channel are shown in the right.
or binary image. If m is higher, then the pixel values lie in the wider range. In this study, the range value of the images is [0, 255].
Images are important and interesting objects of study. There are some challenging problems involving the image, for example, image classification, segmentation, recon- struction, recognition, etc. It has been widely applied to many fields such as medical, robotics, informatics, etc. The focus of this study is image classification.
This study focuses on the brightness images for the PDE approach and the color images for the CNN approach. Hence, we can use the simple method to convert the color images into the brightness images, for example, linear combination. On the other hand, we can copy the pixel values of the brightness images to get RGB format images.
1.2 Capillaries
Capillaries are the smallest-diameter blood vessels which connect arteries to veins. The
size of capillaries is about 5 to 10 micrometers in diameter and their diameter averages
Chapter One 3
Figure 1.2: The image of capillaries taken by a microscope. The upper and below images are taken from different fingertips.
8 micrometers [6]. According to a private discussion with medical experts, there is a medical research that suggests that the shape and other features of human capillaries are linked to other health measures. Ogawa [14] outlined that the health of a person affects the shape of capillaries at the root of a fingernail. [20] also reported that the structure of capillaries is strongly related to serious diseases: connective tissue disease, diabetic Mellitus, and cancer. Hence, in the preventive medicine field, examining the capillaries status is important as a diagnostic tool.
In general, checking capillaries directly is not easy, for example, when examining the capillaries at eye’s fundus, the dilation of the pupil is required. However, by assuming the capillary is the track of the red blood cells, then capturing the image of the capil- laries around the root part of a fingernail can be conducted just by a microscope with magnification around 700-900. Thus, it is possible even to conduct the observation with a cheap microscope and record the changes of the patterns easily. Figure 1.2 show exam- ples of capillaries on human fingertips taken by 700-900 magnification of a microscope.
The lens of the microscope were located on the skin near the root of a fingernail.
However, diagnosis based on these images is not an easy task because it requires the
skill of medical experts (doctors). This skill is unique and not every doctor can perform
this diagnosis. Different doctors might give different diagnosis results. Hence, by the
motivation of how to learn the diagnosis from the skilled medical experts and how to
develop a consistent diagnosis, the problem is how to learn the structure of capillaries
from its image.
Chapter One 4
Figure 1.3: The images of artificial capillaries for the straight (left) and wiggly (right).
The starting point of this paper is the research work by Hung, Nakane, and Hashimoto [9] which developed a judgment category by measuring curve oscillation. They presented the images of capillaries for both healthy and unhealthy persons. According to those images, the straight capillary is related to healthy persons, while the wiggly capillary is related to unhealthy persons. The straight capillary has a shape expressed by a U-configuration. Let consider this U-shape as a turning point. We said the straight capillary has at most one turning point. However, if the shape of capillary has at least two turning points, then the capillary is wiggly.
The purpose of this research is to judge the status of images by (i) PDE approach and (ii) CNN approach according to medical motivation. The output of the first approach is either straight or wiggly, but the more details explanation cannot be added. For the second approach, the output is not only straight or wiggly but also several abnormal patterns of the capillaries.
The base of the PDE approach is the active contour method to detect the edge of an object in the brightness image input. The curvature is then estimated along the edge.
The curvature is analyzed using the Fourier transform. The output is the frequency that corresponds to the peak magnitude. If such frequency is zero, then the status image of the input is straight. If such frequency is nonzero, then the status image of the input is wiggly. Unfortunately, the abnormal patterns of the capillaries are classified as the wiggly by this PDE approach. Thus, we present the second approach, that is CNN.
We report two models of the CNN approach. The first model of CNN has two categories
that are straight and wiggly. We use the images of artificial capillaries to train the
CNN model. These images are created by hand and labeled intentionally based on
the images of real capillaries in [3] for each straight and wiggly, as shown in Figure
1.3. Actually, the wiggly capillary has a meaningless meander which is a complicated
structure. Unfortunately, the meaning of these complicated structures is very difficult
to transfer the information or technique to other doctors.
Chapter One 5 The first model of CNN can distinguish the structure of capillaries into two rough cate- gories, but no further information can be added by this model. We think it is insufficient because (i) skill cannot be transferred to other doctors, (ii) the causes and the effects are not clear, which is not good for further research, and (iii) new detail explanation cannot be found. To overcome these problems, we divide the meaning of the complicated structures into several patterns such as wiggly (meaningless meandering), unexpected separation pattern, a vague edge which the blood exudes on the random part of cap- illaries, and branch appearing. The edge is the boundary of an object on the image.
Therefore, the second model of CNN has nine categories, that are straight fine, straight 1 branch, straight 2 branches, straight jump, straight sharp, wiggly fine, wiggly 1 branch, and wiggly 2 branches, wiggly jump. The first category is the simple structure without any abnormal type. The second category is the simple structure with a branch point.
The third category is the simple structure with two branches points. The fourth cate- gory is the simple structure with a jump. The fifth category is the simple structure with sharp oscillation. The sixth category is the meandering pattern without any separation and branch. The seventh to ninth category is similar to the second to fourth category respectively except the pattern which is meandering type.
This model also uses the image of artificial images for each category. Instead of jumping directly into nine categories as the second CNN model, we report the first CNN model to assure that the CNN approach can work well as the first approach.
Here is the brief summary of our strategy of the second CNN approach:
1. Segmentation of notions.
We divide the abnormal types of capillaries into several patterns such as meander- ing, unexpected separation pattern, and branch appearing.
2. Defining a mathematical category for each pattern.
We give a stage number for each pattern. Here is the example: (i) by using the image processing which is PDE approach, we give meandering category for the case meaningless meandering, (ii) we count the number of ‘ separation ’ or ‘ branch ’ points and give indicator, and (iii) for the case of vague edge, we give indicator by measuring the vague part ratio by naked eye or image processing.
3. Creating artificial data for training. We create training image data with indicators for each pattern.
4. Train CNN using artificial data.
Generally, CNN requires a large number of images in training data. All these images
determine the adjusted parameters during training. However, this can be tackled by the
Chapter Two 6
transfer learning that leads to a reduction in the number of trainable parameters. The
transfer learning means we copy the model and its optimum parameters. This model
is a so-called pre-trained. We select VGG16 as the pre-trained model in this study
and combine it with our network. Hence, the input of the images is feeding up to the
pre-trained model first, and then the output becomes the input to our network. As a
consequence, the number of images used in training can be much declined. Besides, the
patterns of the capillaries are not as much complex as image classification between cats
and dogs. Hence, the number of image data is still able to be decreased. The benefit
of this approach is the possibility to train CNN by a small number of test data. The
other merit is not only the capillaries are classified into straight and wiggly, but the
damage of capillaries is also classified. The output is expressed by numbers (score) for
each category. This score means how close the input image to the training data of each
category.
Chapter 2
Partial Differential Equation
Approach on Edge Detection and Its Classification
The given image in this chapter is limited to the monochrome or brightness image. We propose the PDE approach to judge the image. The summary of this approach is given in Figure 2.1. The output of this approach is that the given input image is either straight or wiggly. From these outputs, we cannot add detail information about the abnormal pattern of capillaries. The first is a method to detect the edge of an object on a given image. The curvature of a given curve is the second. The last is the Fourier transform of a given function.
2.1 Edge Detection
Let f : Ω → R be a given image, where Ω ⊂ R
2is an open and bounded set. Assume that there is at least one object drawn on the given image f. This is called an object when it has a different brightness value than the background. The edge of this object refers to the location where there is a discontinuity on f . Mathematically, E ⊂ Ω is the edge if and only if f (x, y) is discontinuous for every (x, y) ∈ E. Hence, the mathematical problem of edge detection is how to find E from the given image f .
2.1.1 Gradient method
Looking at the gradient of f might be the first attempt since it is quite simple and fast.
The edge of an object on image f is E = { (x, y) ∈ Ω | |∇f (x, y)| 6= 0 } . However, it
7
Chapter Two 8
Input the brightness image
Detect the edge of the object by the ac- tive contour method
The curve of the edge of the object Estimate the curva-
ture of the curve
The approximated curveture along
the curve
Fourier transform
The magnitude that corresponds to the frequency kp: The frequency
at which the peak magnitude occurs
Ifkp= 0, then the input image is
straight
Ifkp6= 0, then
the input image is wiggly
Figure 2.1: The summary of the PDE approach to judge the image.
Chapter Two 9 is quite problematic if there exists a noise on f . Generally, these happen very often.
As a consequence, it gives an unwanted result E which now contains the edge and the location of the noise. Therefore, another approach is needed to get E containing exactly the edge. One of them is the optimization approach.
There have been several different methods when the optimization approach is selected, for example, Split Bregman [8], Perona-Malik [15], Mumford-Shah [3], or Canny method.
This study selects the active contour method since it is quite relevant to the specific image of capillary later.
2.1.2 Active contour method
For more details, please see [4]. The active contour method is a segmentation between object and background in the image. The object indicates the different brightness value with the background.
2.1.2.1 Basic formulation
Let f : Ω → R be given where we assume the object exists in f . The open subset ω ⊂ Ω is related to the object in Ω and the background is related to Ω\ω. Then we define the functionals as follows:
F
0(ω, c
0, c
1) = λ
1Z
ω
|f (x) − c
0|
2dx + λ
2Z
Ω\ω
|f (x) − c
1|
2dx + γ|∂ω| (2.1)
where c
0and c
1are constant, |∂ω| is the length of the boundary of ω, and λ
1, λ
2, γ > 0
are fixed parameters. Minimizing the first two terms in the right-hand side (RHS) of
(2.1) means that the curve will coincide to the edge of an object on f. While minimizing
the last term in RHS of (2.1) means we want the curve as shortest as possible. Finally,
minimizing the functional F
0means finding ω which its boundary is as shortest as
possible and coincides to the edge of an object on f . Taking the first variation of F
0is
complicated so that we need to express F
0in the other way by level-set formulation.
Chapter Two 10 2.1.2.2 Level-set formulation
Let φ : Ω → R be a Lipschitz function such that
∂ω = {(x, y)|φ(x, y) = 0}
ω = {(x, y)|φ(x, y) > 0}
Ω\ω = {(x, y)|φ(x, y) < 0}.
We approximate the Heaviside and the delta Dirac function in the distributive sense by smooth functions as follows:
H
(x) = 1 2
1 + 2
π arctan x
and
δ (x) = dH (x)
dx =
π (
2+ x
2) .
Thus, we introduce a functional F
1()related to F
0as the following, F
1()(φ, c
0, c
1) = λ
1Z
Ω
|f (x) − c
0|
2H (φ)dx + λ
2Z
Ω
|f (x) − c
1|
2(1 − H (φ))dx
+ γ Z
Ω
δ (φ)|∇φ|dx. (2.2)
F
1()is an approximation of F
0.
Let fix φ and c
1. We define one-dimensional real function, G
()0(c
0) := F
1()(φ, c
0, c
1).
The derivative is
dG
()0dc
0= 2λ
1Z
Ω
(f (x) − c
0)H (φ)dx.
We obtain
dGdc()00= 0 if
c
0= R
Ω
f (x)H
(φ)dx R
Ω
H (φ)dx . (2.3)
The denominator is not zero if |ω| 6= 0.
Let fix φ and c
0. We define one-dimensional real function,
G
()1(c
1) := F
1()(φ, c
0, c
1).
Chapter Two 11 The derivative is
dG
()1dc
1= 2λ
2Z
Ω
(f (x) − c
1) (1 − H
(φ)) dx.
We obtain
dGdc()11
= 0 if
c
1= R
Ω
f (x) (1 − H
(φ)) dx R
Ω
(1 − H (φ)) dx . (2.4)
The denominator is not zero if |Ω\ω| 6= 0.
The minimizer of c
0and c
1obtains from (2.3) and (2.4) respectively. From this formula, when we know φ, then c
0and c
1can be calculated directly. This means we can write F
1()(φ) instead of F
1()(φ, c
0, c
1).
The remained variable that needs to be considered is φ. Let Φ ∈ C
c∞(Ω, R), the first two terms of F
1()is F
12(), and the last term of F
1()is F
13(). By taking the first variation of F
12()with respect to φ, we get
d
dν F
12()(φ + νΦ)
ν=0= d dν
λ
1Z
Ω
|f (x) − c
0|
2H (φ + νΦ) dx
+λ
2Z
Ω
|f (x) − c
1|
2(1 − H (φ + νΦ)) dx
ν=0
= λ
1Z
Ω
|f (x) − c
0|
2δ
(φ) Φdx − λ
2Z
Ω
|f(x) − c
1|
2δ
(φ) Φ dx.
By taking the first variation of F
13()with respect to φ, we get d
dν F
13()(φ + ν Φ)
ν=0= d dν
γ
Z
Ω
δ (φ + νΦ)|∇φ + νΦ| dx
ν=0
= γ Z
Ω
d
dν (δ (φ + νΦ) |∇φ + ν∇Φ|)
ν=0dx
= γ Z
Ω
δ (φ) d
dν |∇φ + ν∇Φ|
ν=0
+ |∇φ + ν∇Φ| d
dν δ (φ + νΦ)
ν=0dx
= γ Z
Ω
δ (φ) ∇φ · ∇Φ
|∇φ| + |∇φ|Φδ
0(φ) dx
= γ Z
Ω
− div
δ (φ) ∇φ
|∇φ|
Φ + |∇φ|Φδ
0(φ) dx
= γ Z
Ω
−δ
(φ) div ∇φ
|∇φ|
Φ − ∇ (δ (φ)) · ∇φ
|∇φ|
Φ + |∇φ|Φδ
0(φ) dx
= γ Z
Ω
−δ
(φ) div ∇φ
|∇φ|
Φ − δ
0(φ) ∇φ · ∇φ
|∇φ|
Φ + |∇φ|Φδ
0(φ) dx
= γ Z
Ω
−δ
(φ) div ∇φ
|∇φ|
Φ − δ
0(φ) |∇φ|Φ + |∇φ|Φδ
0(φ) dx
= γ Z
Ω
−δ
(φ) div
∇φ
|∇φ|
Φ dx.
Chapter Two 12 Therefore, we get,
d
dν F
1()(φ + ν Φ)
ν=0= d
dν F
12()(φ + ν Φ)
ν=0+ d
dν F
13()(φ + νΦ)
ν=0= λ
1Z
Ω
|f(x) − c
0|
2δ
(φ) Φdx − λ
2Z
Ω
|f (x) − c
1|
2δ
(φ) Φ dx
− γ Z
Ω
δ (φ) div
∇φ
|∇φ|
Φ dx.
2.1.2.3 Gradient descent method
In this subsection, we consider the time-dependent problem, φ : [0, ∞) × Ω → R. Taking the first variation of F
1()in (2.2) with respect to φ and applying the gradient descent method lead to,
∂φ
∂t = δ
(φ)
−λ
1|f − c
0|
2+ λ
2|f − c
1|
2+ γdiv ∇φ
|∇φ|
in (0, ∞) × Ω, (2.5a)
φ = φ
0in {0} × Ω, (2.5b)
∂φ
∂n = 0 on (0, ∞) × ∂Ω. (2.5c)
where φ
0: Ω → R and
∂φ∂ndenotes normal derivative of φ at the boundary.
Let φ
Nbe the solution of (2.5). Then the edge of an object on f is the curve C
N, the zero level set of φ
N. We stop the iteration when the zero level set of {φ
n} converge because the main concern is the zero level set. Finite difference method is used to find the approximation of the solution of (2.5). The algorithm 1 shows the detailed implementation. All the given images when we apply this method in fourth chapter have m
1and m
2not greater than 280.
2.2 Estimation of Curvature
We show a brief explanation about curvature here. For more details, see [7]. Let ζ(s) = (x(s), y(s)) where s ∈ [0, 1] be the parametric representation of ∂ω, where x, y : [0, 1] → R, both x and y are twice continuously differentiable, and |ζ
0| 6= 0. Let T
ζ(s), N
ζ(s), and k
ζ(s) be a unit tangent vector, unit normal vector, and the signed curvature respectively of the curve ζ at s. Note that k
ζ: (0, 1) → R. Hence,
T
ζ(s) = 1
|ζ
0(s)| x
0(s), y
0(s)
Chapter Two 13
Algorithm 1 Finding the solution of (2.5) Given:
f
ijis the image where i = 0, 1, . . . , m
1− 1, j = 0, 1, . . . , m
2− 1 H
(x) =
121 +
2πarctan
xδ
(x) =
π1(2+x 2)Choose:
λ
1= λ
2= 1, γ = 10, = 0.01: Fix the parameters h
(t)= 10
−7: Time step
h
(x)=
m11−1
, h
(y)=
m12−1
: Space step Calculate:
φ
(0): [0, 1] × [0, 1] → R φ
(0)ij= 3 −
r
im1−1
−
122+ 2
j
m2−1
−
122(Initial function) C
0← The zero level set of φ
(0)(Make sure |C
0| 6= 0)
c
0←
Pm1−1 i=0
Pm2−1 j=0 fijH
φ(0)ij Pm1−1
i=0
Pm2−1 j=0 H
φ(0)ij
c
1←
Pm1−1 i=0
Pm2−1 j=0
1−H
φ(0)ij
fij
Pm1−1 i=0
Pm2−1 j=0
1−H
φ(0)ij
n ← 0 (Initial timestep) while C
nnot converged do
n ← n + 1
φ
(n)← Apply finite difference method in the Equation (2.5a) and (2.5c) C
n← The zero level set of φ
(n)c
0←
Pm1−1 i=0
Pm2−1 j=0 fijH
φ(n)ij
Pm1−1
i=0
Pm2−1 j=0 H
φ(n)ij
c
1←
Pm1−1 i=0
Pm2−1 j=0
1−H
φ(n)ij
fij Pm1−1
i=0
Pm2−1 j=0
1−H
φ(n)ij
end while Result:
C
nand
N
ζ(s) = 1
|ζ
0(s)| y
0(s), −x
0(s)
where s ∈ (0, 1). Curvature is one of the tools to measure how much the curve bends from its tangent line. The curvature of a curve which is straight line is zero. It can be formulated as
k(s)N (s) = lim
h→0
T
ζ(s + h) − T
ζ(s) h
= 1
|ζ
0(s)|
3x
00(s)(y
0(s))
2− y
0(s)y
00(s)x
0(s) , y
00(s)(x
0(s))
2− x
0(s)x
00(s)y
0(s)
.
Chapter Two 14 Therefore,
k(s) = x
00(s)y
0(s) − y
00(s)x
0(s)
|ζ
0(s)|
3, (2.6)
where s ∈ (0, 1). Finite difference method is used to approximate the curvature in (2.6).
2.3 Analysis Using Fourier Transform
For more details explanation, see [1]. Let η : R → R, then the Fourier Transformation of η, denoted by η, is defined by ˆ
ˆ η(k) =
Z
∞−∞
η(x)e
−2πikxdx. (2.7)
Note here that η ˆ : R → C. Let k be so-called the frequency. Let call |ˆ η(k)| the magnitude at the frequency k. This magnitude is an even function. Therefore, we consider the nonnegative k in this research.
One might notice that if η is defined on the domain [0, 1], then η ˆ is calculated by
ˆ η(k) =
Z
1 0η(x)e
−2πikxdx. (2.8)
This give a similar result to when we set η = 0 outside (0, 1) and calculating 2.7. Since (2.8 ) is used later, then we focus on this case.
Theorem 2.1. Let η : [0, 1] → R, if 0 < η(t), ∀t ∈ [0, 1], then the peak magnitude occurs at zero frequency.
Proof. Since η is a positive function, then
|ˆ η(k)| =
Z
1 0η(x)e
−2πikxdx
≤ Z
10
η(x)e
−2πikxdx =
Z
1 0|η(x)| dx = Z
10
η(x) dx
for every k . While for k = 0 , we have
|ˆ η(0)| =
Z
1 0η(x) dx
= Z
10
η(x) dx.
The last equality holds since η is a positive function. Therefore, the peak magnitude occurs at zero frequency.
Corollary 2.2. If η(t) < 0, ∀t ∈ [0, 1], then the peak magnitude also occurs at zero
frequency.
Chapter Two 15 Here are the relevant basic properties:
1. Linearity
Let η
0, η
1, η
2: [0, 1] → R and η
0= η
1+ η
2, then
ˆ η
0(k) =
Z
1 0η
0(x)e
−2πikxdx
= Z
10
(η
1(x) + η
2(x)) e
−2πikxdx
= Z
10
η
1(x)e
−2πikxdx + Z
10
η
2(x)e
−2πikxdx
= ˆ η
1(k) + ˆ η
2(k).
2. Translation
Let η
3, η
4: R → R and η
3(x) = η
4(x − c) for some c ∈ R, then ˆ
η
3(k) = Z
∞−∞
η
3(x)e
−2πikxdx
= Z
∞−∞
η
4(x − c)e
−2πikxdx
= Z
∞−∞
η
4(x − c)e
−2πik(x−c)+2πikcdx
= e
2πikcZ
∞−∞
η
4(y)e
−2πikydy
= e
2πikcη ˆ
4(k).
Moreover, |ˆ η
3(k)| = |ˆ η
0(k)| for every k . This means the magnitude of the frequency k for the Fourier transformation’s result of a function and its translation is the same.
We propose the analysis using Fourier transform since the curvature of the straight capillary can be considered as a Gaussian function based on the results in the last chapter. As a consequence, the peak magnitude occurs at the zero frequency. If the curvature oscillates significantly, then this curvature looks like a sine or cosine function for some nonzero frequency. Consequently, the peak magnitude will occur at the nonzero frequency. This is an interesting fact that gives much help in this study.
Let G
a,b: R → R where G
a,b(x) = ae
−bx2be the Gaussian function which has the
peak a at x = 0 ∈ I and has the slimness factor by b, where a, b ∈ R and b > 0. Let
Chapter Three 16
g(x) = G
a,b(x) almost everywhere. Then ˆ
g(k) = Z
∞−∞
g(x)e
−2πikxdx
= Z
∞−∞
ae
−bx2e
−2πikxdx
= a Z
∞−∞
e
−bx2−2πikxdx
= ae
−π2k2 b
Z
∞−∞
e
−bx+πikb
2
dx
= a √
√ π b e
−π2k2 b
.
This means the Fourier Transformation’s result of a Gaussian function is also Gaussian function with different peak value and slimness factor.
Let G be any Gaussian function, from second and third properties then G ˆ is a Gaussian
function which might have different peak value and slimness factor than G , but the peak
value of the magnitude always occurs at the zero frequency.
Chapter 3
Convolutional Neural Network Approach
We propose the CNN approach to judge the status of the images according to medical motivation. We base our model on a pre-trained VGG16 model for the lower layers of the network and our implementation uses Python and the Torch library. Neural networks are first explained in this chapter since it is the basis of CNN. Then the details of the CNN are briefly described. The next is the explanation about the transfer learning. The last is our proposed model.
The CNN becomes exponentially quite popular in these recent years. It is the most powerful tool used for a large-scale image recognition [12], [17], and [18]. It is also applied to other classification problems, for examples, in [13] and [19]. In addition, it is applied to medical images [10], [5], [16], and [21]. For this reason, it is chosen as an important approach in this study. This chapter explains briefly about CNN, for more details, see [2].
3.1 Neural Networks
Mathematically, one describes a neural network as a mapping from a set of inputs to a set of outputs which is determined by the parameters that can be adjusted. This mapping can be a composition of two or more functions. There are many possibilities of how the setting of this composition, what kind of functions, or how many parameters needed. The explanation in this section does not cover all of them, but we give one example to get a better understanding of the neural networks.
17
Chapter Three 18
Input
Layer-1
.. .
Layer-2
.. .
. . . Layer-n
.. .
. . . Layer-N
.. .
Ouput
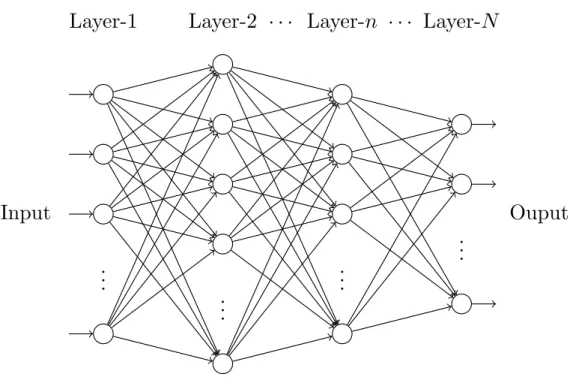
Figure 3.1: A sample of N -layers neural networks. The circle or node indicates the perceptron.
There is another way to interpret a neural network. One can see it as the process of a set of inputs that pass through one or more layers, where there is a set of nodes in each layer, before producing a set of outputs. One might say the second layer up to N − 1 is the hidden layer. One sometimes might say the node as the perceptron. Figure 3.1 shows an example of a model of a fully connected neural network with N -layers. A neural network does not need to be always fully connected.
For more details, let an input, the number of layers, and the number of nodes in layer- n be given by {x
i∈ R | i = 1, 2, 3, . . . , M } , N , and Q
(n)∈ Z
+respectively where n = 1, 2, 3, . . . , N. The model is fully connected as in Figure 3.1. The output of node-q at first layer, indicated by the superscript (1), is then
y
q(1)= f
(1)
M
X
p=1
w
pq(1)x
p+ w
(1)0q
, (3.1)
where q = 1, 2, 3, . . . , Q
(1), f
(1): R → R is a nonlinear function called the activation,
and w
(1)pq∈ R for p = 1, 2, 3, . . . , M is the parameter called by the weight and w
(1)0q∈ R
is the parameter called by the bias ∀q = 1, 2, 3, . . . , Q
(1). For the activation function
f : R → R, there exists several choices. Here are some examples, f (x) = tanh(x),
f (x) = 1/ (1 + exp(−x)), f (x) = max(x, 0), and etc. The idea is how to get the output
numbers between 0 and 1 or a positive. It is motivated first by the output is between
Chapter Three 19 yes or no which means 0 or 1, but it is extended to be a real number between 0 and 1 or even be positive real numbers.
Next, the set of input for the next layer is the set of the output from the previous layer.
At layer-n, the output of node-q is
y
(n)q= f
(n)
Q(n−1)
X
p=1
w
pq(n)y
p(n−1)+ w
(n)0q
, (3.2)
where n = 2, 3, 4, . . . , N, q = 1, 2, 3, . . . , Q
(n), f
(n): R → R is the activation function, and w
(n)pq∈ R is the weight and w
(n)0q∈ R is the bias for every p = 1, 2, 3, . . . , Q
(n−1), q = 1, 2, 3, . . . , Q
(n)and n = 2, 3, 4, . . . , N .
From those examples, it can be deduced in the simple and very general way that a neural network is a mapping
F ( x , w ) = y
where x is the set of inputs, w is the set of all parameters, and y is the set of outputs that correspond to the input. In practice, how to set the mathematical problem depends on the specific purpose. For example, one can set the number of layers, the number of nodes in each layer, the activation function, fully connected or not, and the targeted output, this will be explained later. Then the mathematical problem is how to choose the parameters w such that the given input x maps correctly into the target output.
3.1.1 Loss function
The loss function is used to measure how close the output to the targeted output. The targeted output means the desired output which is independent of w. If it is given or it is labeled first, then the training, it will be explained later, is called supervised.
Otherwise, it is unsupervised. Sometimes it is well-known as the errors function.
Let T = t
i∈ R
M0| M
0∈ Z
+, i = 1, 2, 3, . . . , M
c∈ Z
+be the given set of the targeted output. This set is required to be linearly independent. M
cindicates the number of categories. For the example as in Figure 3.1, then M
0= Q
(N). The simplest way for the choice of the targeted output is by setting M
c= M
0and i -th entry of t
iis 1 and the others are 0.
Let t
xi∈ T be the corresponding targeted output of the given input x
i. One chooses the loss function as the following,
E =
N0
X
i=1
|F (x
i, w) − t
xi|
2(3.3)
Chapter Three 20 where N
0is the given number of inputs. There is also another way to define loss function than (3.3).
After defining the loss function, the problem is then how to find the parameters w which are able to minimize the given loss function. As a consequence, one can use the gradient descent method. The process of how to find the minimizer is called training or learning.
3.2 Convolutional Neural Networks
Actually, that model can be interpreted as extracting quite details information from each component of the input. This input can be the pixel of the image, the audio, or the others. For the image classification or recognition, it does not need to extract very details information from each pixel. There can be some pixels which do not give the desire or important information, for example, the background. There can also be the noise of the image. Hence, it is needed to extract information from the local area, a small sub-region of the image. It is also needed, if possible, to be able to deal with the translation, small rotation, and dilatation. In addition, the most important is how to extract the features of the given image. Hence, all of these can be handled by the CNN, where its ideas are local receptive area, the sharing weight, and sub-sampling.
Here are some advantages when applying a CNN. First, the local receptive area keeps the spatial domain of the input. Second, the sharing weight affects the number of parameters is much reduced. Third, whenever the input image is translated, the activations of the feature map are translated by the same amount, but the other feature maps are not changed.
For the calculation, those first two ideas affect that the convolution is needed, instead of component-wise multiplication. For example, let the input be x = ((x
ij)) ∈ M
m1×m2, an image of the size (m
1, m
2), and the activation function f
cbe defined component-wise.
For example, if z = ((z
ij)) ∈ M
mz1×mz2, then f
c(z) = ((f (z
ij))) ∈ M
mz1×mz2where f : R → R. The output of node-q at first layer, indicated by the superscript (1), is
y
(1)q= f
c(1)w
(1)q∗ x + w
(1)0q, (3.4)
where q = 1, 2, 3, . . . , Q
(1), the output y
q(1)∈ M
q(1)
1 ×q2(1)
for some q
(1)1≤ m
1, q
(1)2≤ m
2, the weight or known by the kernel is w
q(1)∈ M
m(1) q1×m(1)q
2
, the bias is w
(1)0q∈ M
q(1) 1 ×q2(1)
, and the component-wise activation is f
c(1). For the layer-n, the output of node-q is
y
(n)q= f
c(n)
Q(n−1)
X
p=1
w
(n)q∗ y
(n−1)p+ w
(n)0q
, (3.5)
Chapter Three 21 where n = 2, 3, 4, . . . , N , q = 1, 2, 3, . . . , Q
(n), the output y
q(n)∈ M
q(n)
1 ×q(n)2
for some q
1(n)≤ q
1(n−1), q
2(n)≤ q
2(n−1), the weight or known by the kernel is w
(n)q∈ M
m(n) q1 ×m(n)q2
, the bias is w
0q(n)∈ M
q(n)
1 ×q2(n)
, and the component-wise activation is f
c(n).
The last is sub-sampling. There are several ways to calculate the sub-sampling, for example, by using the average of the local area or the maximum value of the local area.
If this local area is chosen to be (2 × 2)-size, then the size of the output of the sub- sampling is reduced around a half. Actually, the local area can be chosen to be another size.
One should notice that for CNN, it is typical that the final layer is a fully connected layer. Perhaps some layers before the final layer are already a fully connected layer. The input for this layer is flattened first, then (3.2) is used. This happens since the output does not need to be spatially maintained.
3.3 Transfer Learning
Building or creating the optimum model is not an easy task. There are too many possibilities that can be selected, for example, how many layers needed, the size or number of the kernel that appropriates in each layer, etc. Even if we have already chosen a model, there is a high possibility that the number of images in training dataset is not enough to get the optimum parameters during training. This is because too many parameters that need to be obtained. Therefore, transfer learning is a suitable alternative way.
Transfer learning means that the model and its optimum parameters after being trained by the others on a huge amount of training dataset is being transferred or copied. That model is a so-called pre-trained model. More layers are added at the end of that model.
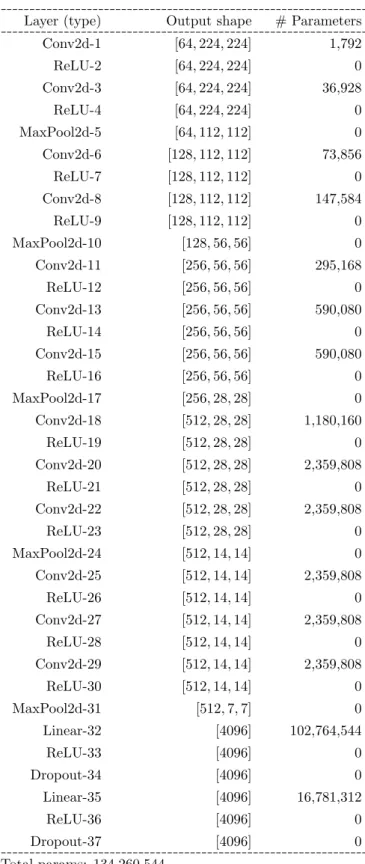
Now, the number of parameters can be reduced so much. As a consequence, the number of images on the training dataset can be reduced too. An example of that pre-trained model, which is chosen in this research, is VGG16. We use the first 37 layers of this pre-trained model, as shown in Table 3.2. The output of this pre-trained model becomes the input of our proposed model.
VGG is the abbreviation for Visual Geometry Group. This VGG16 model was devel-
oped by Si- monyan and Zisserman from Department of Engineering Science, University
of Oxford. It is a very deep CNN model. It was the basis of their ImageNet Challenge
2014 submission, where their team secured the first and second places in the localization
and classification tracks respectively [18]. VGG16 classifies images into 1000 categories.
Chapter Three 22 Among these categories, some examples are snakes, spoons, microphones, and paint- brushes. We assume the complicated structures of capillaries are similar to snakes and the simple structures are similar to spoons, microphones, or paintbrushes. The input images of VGG16-model are in RGB format of fixed 224 × 224-size. We use the first 37 layers of this pre-trained model, as shown in Table 3.2. The output of this pre-trained model becomes the input of our proposed model.
3.4 The Proposed Model
We propose a model of a fully connected layer consisting of 5 layers. The first layer consists of 256 nodes. Consequently, this layer requires 1,048,832 parameters because the output from the pre-trained model has 4,096 nodes. Let the output of the pre-trained model be y
(37)∈ R
4096. Thus, the output of layer p
1is
y
(p1)= w
(p1)y
(37)+ w
(p(0)1)where y
(p1), w
(0)(p1)∈ R
256and w
(p1)∈ M
256×4096. The output of layer p
2is y
(i)(p2)= max
y
(p(i)1), 0
where i = 1, 2, . . . , 256. The Dropout in layer p
3has factor 0.2 which means 20% of the output of this layer in each channel is deactivated randomly. The output of layer p
3is
y
(i)(p3)=
y
(i)(p2)if node-i is activated 0 if node-i is deactivated where i = 1, 2, . . . , 256. Layer p
4have the output as follows,
y
(p4)= w
(p4)y
(p3)+ w
(p(0)4)where y
(p3)∈ R
256is the output of layer p
3, y
(p4), w
(0)(p4)∈ R
nand w
(p1)∈ M
n×256for the number of categories, n.
The last layer is LogSoftmax, an activation function, where the output of this layer p
5is
y
(i)(p5)= log
exp y
(p(i)4)P
nj=1
exp y
(j)(p4)
for i = 1, 2, . . . , n. We propose two CNN models. The first model is of n = 2 and the
second model is of n = 9 . The summary of the second approach is given in Figure 3.3.
Chapter Three 23
Figure 3.2: The first 37 layers of the model of VGG16.
Layer (type) Output shape # Parameters
Conv2d-1 [64, 224, 224] 1,792
ReLU-2 [64, 224, 224] 0
Conv2d-3 [64, 224, 224] 36,928
ReLU-4 [64, 224, 224] 0
MaxPool2d-5 [64, 112, 112] 0
Conv2d-6 [128, 112, 112] 73,856
ReLU-7 [128, 112, 112] 0
Conv2d-8 [128, 112, 112] 147,584
ReLU-9 [128, 112, 112] 0
MaxPool2d-10 [128, 56, 56] 0
Conv2d-11 [256, 56, 56] 295,168
ReLU-12 [256, 56, 56] 0
Conv2d-13 [256, 56, 56] 590,080
ReLU-14 [256, 56, 56] 0
Conv2d-15 [256, 56, 56] 590,080
ReLU-16 [256, 56, 56] 0
MaxPool2d-17 [256, 28, 28] 0
Conv2d-18 [512, 28, 28] 1,180,160
ReLU-19 [512, 28, 28] 0
Conv2d-20 [512, 28, 28] 2,359,808
ReLU-21 [512, 28, 28] 0
Conv2d-22 [512, 28, 28] 2,359,808
ReLU-23 [512, 28, 28] 0
MaxPool2d-24 [512, 14, 14] 0
Conv2d-25 [512, 14, 14] 2,359,808
ReLU-26 [512, 14, 14] 0
Conv2d-27 [512, 14, 14] 2,359,808
ReLU-28 [512, 14, 14] 0
Conv2d-29 [512, 14, 14] 2,359,808
ReLU-30 [512, 14, 14] 0
MaxPool2d-31 [512, 7, 7] 0
Linear-32 [4096] 102,764,544
ReLU-33 [4096] 0
Dropout-34 [4096] 0
Linear-35 [4096] 16,781,312
ReLU-36 [4096] 0
Dropout-37 [4096] 0
Total params: 134,260,544 Trainable params: 0
Non-trainable params: 134,260,544
1
Chapter Three 24
Input the color image VGG16
output-4096 ... output-6 output-5 output-4 output-3 output-2 output-1
Layer-p1
...
Layer-p2
...
Layer-p3
...
Layer-p4
...
Layer-p5
...
Ouput
Figure 3.3: The flow chart of the second approach. The proposed model is in the dashed rectangle.
The loss function that we choose in this research is the Average Negative Log Likelihood.
Since the final layer score is already the LogSoftmax-layer, then multiplying by negative one is enough. We define T as the set of targeted output. Let M ∈ Z
+be the number of images in training, y
(p5,m)∈ R
nbe the output of the layer p
5for m
th-image, and t
m∈ T be the targeted output of m
th-image. Since the final layer is LogSoftmax, then the negative log-likelihood is defined as
L(y
(p5), t, w, M ) = 1 M
M
X
m=1
−y
(p(i)5,m)i=argmaxt
m