2007 年 3 月
March 2007
第 77 回 風洞研究会議論文集
Proceedings of the Wind Tunnel Technology Association 77
thmeeting
宇宙航空研究開発機構特別資料
JAXA Special Publication
宇宙航空研究開発機構
Japan Aerospace Exploration Agency
第 77 回風洞研究会議(平成 18 年 11 月 16 、 17 日)
1.低速流れでの非定常微小圧力場の PSP 計測 ……… 1 中北和之( JAXA )
2. JAXA 2m × 2m 遷音速風洞における測定部マッハ数検定試験 ……… 6 香西政孝、上野真、塩原辰郎、小松行夫、唐沢敏夫、小池陽、須谷記和( JAXA )、
我那覇義人、今直樹(コスモテック)、原口智裕( IHIAE )、中村晃祥( JAST )
3. JAXA 0.44m 極超音速衝撃風洞と気流偏向特性試験 ……… 15
山崎 喬、中北和之( JAXA )、中川宗敬 (JAST) 、渡利 實( JAXA )
4.風洞用高速ファンの設計事例 ……… 33 和田 茂、大野俊仁、関沢裕明、三代川 伸、川田貴之(日本飛行機)
5. JAXA 極超音速風洞( M5 ) HB-2 標準模型試験 ……… 37 平林則明、小山忠勇、津田尚一( JAXA )、関根英夫( JAST )、
木伏淳子(スペースサービス)、渡利 實( JAXA )
6.シャープフォーカシングシュリーレン法について ……… 47 樫谷賢士、山口 裕、須田武志、北野秀樹(防衛大)
7.フェーズド・アレイによる低速風洞での空力騒音計測 ……… 53
伊藤 健、浦 弘樹( JAXA )
低速流れでの非定常微小圧力場の PSP 計測
○中北和之(宇宙航空研究開発機構)
Key Words : Unsteady Flow, Pressure-Sensitive Paint (PSP), Pressure Distribution
概要
低速流れでの非定常かつ微小な圧力変動場を画像計測するため、高速応答型 PSP からの発光を高速カメラ で計測し、得られた多数枚の時系列画像群に対して FFT による周波数解析を適用して周波数帯ごとの変動 圧力成分の分布を取得する非定常圧力場計測手法を開発した。この手法を用いて 33m/s の低速流れ中に置 かれた2次元円柱周りのカルマン渦による非定常圧力分布を計測した。 FFT を用いた非定常圧力計測手法と 2次元円柱周りの非定常圧力場の画像計測結果を紹介する。
1.はじめに
感圧塗料
1(以下、 PSP )は模型全体の詳細な圧力分布 を得ることができる新しい計測手法である。 JAXA 風洞技 術開発センターでは JAXA 第一期中期計画( 2003-2007 年 度)での活動として大型風洞群への実用 PSP 計測システ ムの整備を進めている。 2m × 2m 遷音速風洞及び 1m × 1m 超音速風洞
2-5を主ターゲットとし、 2m × 2m 低速風 洞及び 6.5m × 5.5m 低速風洞の低速領域
6, 7についても整 備を進めており、国産旅客機プロジェクトを始め航空宇 宙分野の研究開発に活用されている。また JAXA では時 間応答性が 10kHz 以上の高速応答型感圧コーティング
(以下、高速応答 PSP )の開発も進められており、このコ ーティングを用いた極超音速衝撃風洞での短時間現象計 測
8や高速カメラと組み合わせた非定常計測
9も行われて いる。
2008 年度からの JAXA 第二期中期計画では新規研究課 題として非定常空力現象を詳細に把握するための非定常 変動場計測技術の研究開発を提案している。本テーマは 非定常 PSP 技術、時系列 PIV 技術、非定常模型変形量計 測技術の3技術から成る。航空宇宙機の高性能化や高効 率化、環境適合、安全などの要求に対応する非定常空力 現象を多面的に把握し、高度な手法やデバイスの開発に つなげる突破口とすることを意図している。また近年急 速な進歩が見られる Unsteady RANS や LES などの非定 常 CFD に対し、検証データが提供できることにも意義が ある。現状での実験側の非定常計測ツールとしては非定 常圧力センサやホットワイヤなどが存在するが、 PSP, PIV によって画像計測による大情報の非定常データを提 供できれば、価値の高い検証データとなり非定常 CFD の 信頼性向上にも大いに寄与できるものと考える。
非定常変動場計測技術の研究開発の中での非定常 PSP としてはフラッタ、ヘリコプタ・ブレード、バフェット などの衝撃波振動現象、空力音に関連する圧力変動など をターゲットとしている。共通に必要となる技術は高性 能な高速応答 PSP と非定常データ処理ソフトである。こ のうち高速応答 PSP に関しては JAXA での現状技術とし て 10kHz を超える十分な応答性を持つ陽極酸化アルミに
感圧色素を吸着させた AA-PSP があるが、模型材料がア ルミ系材料に限定されるため、材料を選ばず使用可能な 塗装型高速応答 PSP を開発中である。
一方、非定常データ処理ソフトに関しては、バフェッ トなどの比較的圧力変動が大きく、フラッタのように現 象が非周期的なものも含まれるケースと、空力音に関連 する圧力変動のように圧力変動が微小であるが、現象が 周期的なものの2つに分類することを想定している。前 者については 1kPa 以上の圧力変動を処理するため、高速 カメラで取得したビデオデータの個々の画像を従来と同 様のプロセスで処理することで圧力変動を計測すること を想定している。後者については低速流れでの 100Pa オ ーダーの微小な圧力変動を扱う。個々の画像に対する処 理では有意な圧力変動を検出できないが、現象を周期的 なものに限定すれば、計測対象に対する一般性をそれほ ど失うことなく微小な圧力変動が捕らえられる。本稿で はこの周期的な非定常変動圧力場に対する新しい計測手 法を提案する。空力騒音の計測を視野に入れた非定常 PSP 計測を考えているが、空力騒音の音圧を直接に計測 するのではなく、流れの中の物体が存在する場合に発生 する二重極音と相関する物体表面上の変動圧力分布が計 測対象である。 PSP ではジェット騒音などのように物体 が存在せず流れの乱れから発生する四重極音については 計測できないが、低マッハ数流れでは二重極音が卓越す るため、かなりな範囲において工学的に有用なツールと なる可能性がある。 PSP による計測データを直接に形状 設計に反映し非定常変動圧力の小さい形状に修正したり、
あるいは音響アナロジーを介して空力音を算出すること も可能であろう
10。
PSP は絶対圧計測手法であるため空力騒音に関係する
大気圧付近での微小な圧力変動の計測はショットノイズ
の存在などによって原理的に不得手である。定常現象に
対しては多数枚の画像積算により PSP データに含まれる
ノイズ成分を低減させることで微小圧の計測が行われて
いる。しかし非定常現象に対してはこのような手法を用
いることはできず、現存技術では kPa オーダーの非定常
圧力の計測が限界である
5。単一の周波数成分からなる計
測対象に対してはフェーズロックによる積算を用いて微 小な非定常圧力まで計測している例
11もあるが、一般的 にはこのような手法が適用できる狭帯域現象はほとんど なく実用的ではない。
ここでは高速応答 PSP を用いた非定常圧力の計測可能 限界を向上させる方法として、非定常現象を周期的非定 常に限定し、高速カメラによる連続時系列画像群に対し て FFT による周波数解析手法を取り入れる手法を提案す る。この手法を用いれば複数計測回のスペクトルを平均 化処理することで周波数次元での S/N 比を向上させるこ とができ、非定常圧力の検出限界を小さな圧力にまで改 善することができる。
本稿ではこの高速応答 PSP を用いた周波数解析による 非定常変動圧力場計測手法について提案し、手法を構成 するソフト的及びハード的な構成要素と、低速風洞での 円柱周りのカルマン渦による非定常圧力場の計測への適 用例を紹介する。
2.感圧塗料及び計測装置
2-1. 高速応答型感圧コーティング
PSP は特定の有機分子からの発光が酸素消光によって 減少することを用いた分子センサである。 PSP からの発 光量は酸素分子の少ない低圧環境下では大きくなり、高 圧下では小さくなる。通常、風洞試験で一般的に用いら れる PSP はバインダであるポリマと感圧色素を溶媒に溶 かし、スプレーで模型表面に塗装されるものである。し かしこれらのポリマをバインダとした PSP はポリマ中の 酸素拡散に律速され、時間応答性は秒のオーダーである。
非定常現象計測にはこのような一般的なポリマタイプ PSP の時間応答性では不足であるため高速応答型感圧コ ーティングを用いる。これはアルミ系材料に陽極酸化に よる酸化アルミ層を形成し、その上に感圧色素を吸着さ せるものであり、 10kHz 以上の時間応答性を持つ
12。本 研究での感圧色素はバソフェナンスロリン・ルテニウム ([Ru (ph
2-phen)
3]Cl
2) である。
図 1 に本研究で用いた供試模型にコーティングされて いる高速応答 PSP の圧力感度の例を示す。 100kPa 付近で の圧力感度は 0.6 程度である。
2-2. 高速カメラ
周期的非定常現象を連続的に計測するためには高速カ メラを用いる。本研究では Vision Research 社製 CMOS 高速カメラ Phantom V4.2 を用いた。カメラのスペックは 512 × 512 ピクセルで 2.2kHz であり、計測画素数を減ら すことにより更なる高速化が可能である。本研究では取 得画像枚数を大きくするためフレームレート 1kHz で 320
× 200 ピクセルと取得領域を制限した。本カメラの A/D 分解能は 8bit と PSP 計測にはやや不足であるが、圧力算 出の前処理工程で 2 × 2 ピクセルをソフト上で 1 ピクセル とするビニング処理を行い(最終的な空間解像度は 160
× 100 ピクセルとなる)さらに空間フィルタを適用する ことにより量子化誤差が緩和されるため本研究の範囲内 においては 8bit であることの制約は感じられなかった。
Phantom 高速カメラのラインナップ中には 14bit の機種 も存在するため、将来的にはこのような高階調カメラに 移行したいと計画している。
2-3. 感圧塗料計測システム
前述の高速応答型感圧コーティング、高速カメラ以外 の主要な計測システム要素として励起光源がある。本研 究では既存の 300W 高安定キセノン光源を 3 台用いた。非 定常 PSP 計測ではカメラ露光時間が 1ms 以下となるた め、キセノン光源では十分な PSP 発光量を得ることが難 しく、計測可能な変動圧力の限界を決める要因となって いる。 PSP からの発光を増大させると計測可能な変動圧 力の限界や計測周波数を拡張することができるため、今 後は PSP 自体の発光量増大と、 Ar レーザや半導体レーザ、
LED などによる励起光量の増強を図る必要がある。
3.データ処理手法 3-1. PSP データ処理
PSP の発光量と圧力の関係は既知圧力下の発光量と圧 力 I
ref,P
refと通風時の理論的には以下の Stern-Volmer の 式;
ref
ref
I A B P
I = + P
- - - (1)
を用いて記述される。ここで、 I 及び P は試験時の発光量 及び圧力、 I
ref及び P
refは無風時の既知圧力下での発光量 及び圧力である。図 1 に示されるように一般的に PSP の 圧力感度には非線形性が存在するため、実用的な PSP 用 途では式 (1) を多項式に拡張した式が用いられることが 多い。本研究では大気圧付近の微小な圧力範囲を対象と するため、式 (1) をそのまま用いて圧力算出を行った。
3-2. FFT による周波数解析
式 (1) を用いて時系列の PSP 計測画像を時系列の圧力 画像に変換した後、 FFT を用いた周波数解析を施す。 PSP による低速での非定常微圧計測ではショットノイズのた めに単一画像から圧力変動を取り出すことは phase lock のような手法が使える特殊な場合を除いてほぼ不可能で ある。定常計測で用いられるような時系列データの平均 化による S/N 比の向上も非定常計測では用いることがで 図 1 高速応答 PSP の圧力感度
0 0.2 0.4 0.6 0.8 1 1.2
0.2 0.4 0.6 0.8 1.0 1.2
P/Pref (Pref=100kPa)
Iref/I
きない。図 2 にデータ処理の概略を示す。多数枚の時系 列圧力画像に対してピクセルごとに FFT を用い、周波数 次元のデータに変換する。周波数次元のデータは複数回 重ね合わせて S/N 向上のためにデータ積算を行う。周波 数方向のデータ点は多すぎると理解の範囲を超えるため、
ある幅を持つ周波数帯を設定し、この幅の中の周波数デ ータを積算し画像化する。
ンサは φ 1mm の圧力孔に装着されている。模型上のこれ らの圧力孔はカメラ計測画像と円柱模型上の位置関係を 同定するためのマーカとしても利用する。
4-3. 高速カメラの設定
PSP 計測用高速カメラは図 3 の風洞計測部の下方に設 置され真下から模型の θ =0 ~ 180 °の領域を計測する。高 速カメラの撮影条件は計測レート 1kfps 、露光時間 990µs である。
図 2 FFT を用いた周波数解析
ᩇ䈱ᤨ♽PSP⸘᷹↹
0 10 20 30 40 50
0 10 20 30 40 50
-20 0 20 40 60 80
0
PSP
ᤨ♽䊂䊷䉺䉕FFT⸃ᨆ
-20 0 20 40 60 80
100 200 300 400 500
f (Hz) PSP
Arbitray Scale [PSP]
PSP
1 Pixel䈪䈱FFT⸃ᨆ⚿ᨐ
䊶 䊶
䊶
本研究では1計測回あたり 16,384(2
14) 枚の高速カメラ 画像を取得した。これを 512 枚単位に分割し、 2 単位 (1,024 枚 ) 毎を overlap しつつ FFT 処理し、得られたス ペクトルの絶対値を平均化処理する。さらにこれを5計 測回にわたって繰り返し、合計 81,920 枚の画像群から各 ピクセルでの振幅スペクトルを得る。これを 20Hz または 40Hz の周波数帯ごとに積算し、周波数帯ごとの画像情報 とする。
励起光強度には分布が存在するため励起光強度の大き い部位では相対的にショットノイズ成分が小さく、逆に 小さい部位ではショットノイズが大きくなる。これによ って非定常圧力の計測結果に部位によるオフセット成分 のばらつきが生じる。この影響を除去するため、試験画 像取得直後に風洞を停止して無風時のショットノイズだ けが存在する振幅スペクトルを用いる。通風時の振幅ス ペクトルから無風時の振幅スペクトルをピクセルごとに 減算し、部位によるオフセット成分のばらつきを補正す る。これら一連の処理によって非定常圧力場の分布画像 を構築した。
4.風洞及び試験模型 4-1. 風洞
JAXA 総合技術研究本部の小型低乱風洞を用いて円柱周 りのカルマン渦による非定常圧力変動の計測を行った。
小型低乱風洞の計測部は高さ 0.65m 、幅 0.55m であり、こ こに次節に記す二次元円柱模型を設置して試験を行った。
4-2. 試験模型
図 3 に二次元円柱模型を示す。直径 0.04m 、長さ 0.55m であり、中央部 8cm に高速応答 PSP がコーティングされ ている。 PSP コーティング部中心線上には PSP 計測と比 較するために 30 °間隔で 3 点の Kulite-XCS-093-5G 圧力 センサ(フルスケール 5psig )が設置されている。圧力セ
図 3 小型低乱風洞に設置された二次元円柱模型 D=0.04m 、中央部の 8cm が PSP コーティング部
Fast Response PSP
図 4 計測光学系
テストセクション下部から模型を計測
5.低速風洞での円柱試験
小型低乱風洞で行った円柱周りの非定常圧力分布計測 試験の一例を紹介する。
5-1. 円柱周りの流れ場
ここで示す計測結果は U=33m/s 、 Re=8.6 × 10
4でのも のであり、ストローハル数を 0.2 としたときのカルマン渦 の周波数は 165Hz である。
図 5 は圧力センサによる円柱周りの Cp 分布と変動成分 の RMS 値である。 ∆ Cp rms は時系列データでの標準偏 差を用いている。 Cp 分布より 70 °付近で流れが剥離して いることが分かる。圧力変動は澱点付近では小さく、剥 離点よりやや下流の 80 °付近で最大値を取り、その後方 ではほぼ一定値が続いている。
θ =80 °位置の 1 ピクセルの PSP と圧力センサの振幅スペ クトルを比較したものである。
図 7 でストローハル数 0.2 に相当する 160Hz 付近の 140-
180Hz 成分にだけ非定常成分が存在し、他の周波数帯で
は非定常成分はほとんど見られない。これは図 8 の圧力 センサによる振幅スペクトルでも 160Hz 付近のピーク以 外には顕著な成分がないことから妥当な結果であると言 える。また図 8 の圧力センサと PSP の振幅スペクトルで も両者の分布は良く一致している。
図 5 円柱周りの圧力及び圧力変動分布 Pd=640Pa, ∆ Cp rms は時系列データでの標準偏差
-1.5 -1 -0.5 0 0.5 1 1.5
0 20 40 60 80 100 120 140 160 180
θ (deg)
Cp
0 0.1 0.2 0.3 0.4
∆Cp rms
Cp Cp rms
図 6 は円柱上 θ=80 °での圧力センサによって計測され た時系列の非定常圧力データである。後述する振幅スペ クトルにもあるようにカルマン渦による変動圧力成分は 単一周波数ではなくやや広帯域であるため、図 6 の時系 列データもうなりを伴う複雑な挙動を示す。
図 6 θ=80 °での時系列圧力データ例
-1600 -1400 -1200 -1000 -800 -600 -400 -200 0
0 0.1 0.2 0.3 0.4
t (sec)
P (Pa)
5-2. 高速応答 PSP による非定常圧力分布計測
図 7 は高速応答 PSP データを FFT で周波数解析して得 られた非定常圧力の分布画像である。各ピクセルについ ての FFT 結果を 40Hz の範囲で積算し画像にしたもので ある。音響解析では 1 オクターブや 1/3 オクターブ解析 が用いられているが、ここでは等間隔で処理した。図 8 は
図 7 40Hz 毎の円柱上の非定常圧力分布画像
図 8 PSP と圧力センサの振幅スペクトルの比較 θ =80 ° , PSP は 1 ピクセルでのデータ
20-60Hz0 200 400 600 800
140-180Hz 100-140Hz 60-100Hz
180-220Hz
220-260Hz
260-300Hz
300-340Hz
340-380Hz
380-420Hz
420-460Hz
460-500Hz
1000
-20 0 20 40 60 80
0 100 200 300 400 500
f (Hz)
Arbitray Scale [PSP]
-50 0 50 100 150 200
Amplitude [Tap (kPa)]
PSP Pressure Tap
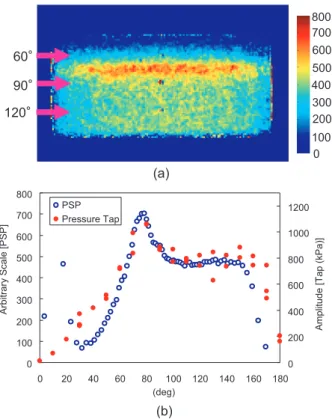
図 9(a) は各ピクセルについて 160Hz ± 10Hz の範囲の
FFT 結果を積算して画像表示したものであり、空間分解
能は縦 100 ピクセル横 160 ピクセルである。図 9(b) は (a)
の中央部で流れの二次元性を仮定し横方向に 80 ピクセル
を平均して得られた周方向分布である。図 9(b) での圧力
センサデータは PSP 結果と同様に時系列データを FFT 処
理し、 150-170Hz の範囲を積算したものである。図 9(a)
からは非定常圧力成分がほぼ二次元的に分布しているこ
と、 θ =80 °付近に変動圧のピークが存在し、下流側では
変動成分はほぼフラット、上流では変動成分が小さいこ
図 9 160Hz ± 10Hz での円柱上の非定常圧力分布
(a) 160Hz±
10Hz帯の非定常圧力分布画像
,画像上方が上流
, (b)非定常圧力の周方向分布 となどが分かる。図 9(b) では定量値までの処理は施して いない段階であるが、 PSP による非定常圧力の計測結果 と圧力センサからのデータとが細部でずれはあるものの 定性的には良い一致を示している。
まだ基本的な技術開発の段階ではあるが、本手法の非 定常圧力分布計測への適用性は確認できたと考える。
ナロジーを介して空力音の大きさを算出する可能性も追 求していきたい。
参考文献
1) J. H. Bell, E. T. Schairer, L. A. Hand and R. D. Mehta,
“ Surface Pressure Measurements Using Lumines- cent Coatings, “ Annual Review of Fluid Mechanics, Vol. 33, 2001.
2) K. Nakakita, M. Kurita, K. Mitsuo and S. Watanabe,
“ Practical Pressure-Sensitive Paint Measurement System for Industrial Wind Tunnels at JAXA ” , Meas.
Sci. Technol. 17, 2005, pp. 359 − 366.
3) K. Nakakita, M. Kurita, and Kazunori Mitsuo,
“ Development of the Pressure-Sensitive Paint Mea- surement for Large Wind Tunnels at Japan Aerospace Exploration Agency, ” ICAS 2004-3.2.2, 2004.
4) M. Kurita, K. Nakakita, K. Mitsuo, Y. Yamamoto, S.
Watanabe, K. Fujii, and H. Kawato, “ Aerodynamic Characteristics of a Lifting-Body-Type Reentry Ve- hicle at Transonic Speeds, ” AIAA-2006-665, 2006.
5) 中北 , 栗田 , 満尾 , 渡辺 , 真保 , “国産小型航空機開 発への感圧塗料技術の適用” , 平成 16 年度飛行機シ ンポジウム講演論文集 , 1A1, 2004.
6) K. Mitsuo, K. Nakakita and M. Kurita, ” Application of Pressure-Sensitive Paint to Low-Speed Wind Tun- nel Testing at Japan Aerospace Exploration Agency, ” ICAS 2004-3.2.3, 2004.
7) K. Mitsuo, M. Kurita, S. Kuchi-Ishi, K. Fujii, T. Ito, and S. Watanabe, “ PSP Measurement of a High-Lift- Device Model in JAXA 6.5m × 5.5m Low-Speed Wind Tunnel, ” AIAA-2007 − 1065, 2007
8) K. Nakakita and K. Asai, “ Pressure-Sensitive Paint Application to a Wing-Body Model in a Hypersonic Shock Tunnel, ” AIAA-2002-2911, 2002
9) M. Kameda, T. Tabei, K. Nakakita, H. Sakaue and K.
Asai, “ Image measurements of unsteady pressure fluctuation by a pressure-sensitive coating on porous anodized aluminium, ” Meas. Sci. Technol. 16, 2005, pp.2517 − 2524
10) 飯田 , 藤田 , 加藤 , 大黒田 , ”空力音の発生機構に関 する実験解析” , 日本機械学会論文集 (B 編 ), 62 巻 604 号 , 1996, pp. 146 − 153.
11) J. W. Gregory, J. P. Sullivan, S. S. Wanis, and N. M.
Komerath, “ Pressure-sensitive Paint as a Distuributed Optical Microphone Array ” , J. Acoust.
Soc. Am., Vol. 119, No. 1, 2006, pp. 251 − 261.
12) H. Sakaue and J. P. Sullivan, “ Fast Response Time Characteristics of Anodized Aluminum Pressure Sen- sitive Paint, ” AIAA-2000-0506, Jan. 2000.
90㫦 120㫦 60
㫦
100 0 200 300 400 500 600 700 800
0 100 200 300 400 500 600 700 800
0 20 40 60 80 100 120 140 160 180 (deg)
Arbitrary Scale [PSP]
0 200 400 600 800 1000 1200
Amplitude [Tap (kPa)]
PSP Pressure Tap
(a)
(b)
6.まとめ
高速応答 PSP からの発光を高速カメラで計測し、デー タに FFT による周波数解析を適用し非定常圧力場の分布 を画像表示する技術を開発した。 U=33m/s の気流中の2 次元円柱周りの流れ場に適用し、非定常圧力場分布の画 像計測に成功した。現時点では十分に定量的な処理まで は行えていないが、定性的には圧力センサによる計測結 果と比較してほぼ妥当な結果が得られた。
現時点では Prms=250Pa 程度の圧力変動を有意に分解 できているため圧力分解能としては十分であるが、計測
周波数が 160Hz 程度であるため、計測可能な周波数範囲
の増大が必要となる。このための改善点としては PSP の 改良あるいは励起光源の強度を大きくして PSP の発光量 を大きくし S/N 比を向上させること、 1kHz 程度までの 現象にまで計測対象周波数を改善することが挙げられる。
本技術は空力騒音の研究ツールとして空力音に関連す
る圧力変動を計測し、形状設計に反映して非定常変動圧
力の小さい形状に修正したり、各種デバイスの性能比較
に用いたりする用途に活用する予定である。また音響ア
JAXA 2m × 2m 遷音速風洞における測定部マッハ数検定試験
香西 政孝、上野 真、塩原 辰郎、小松 行夫、唐澤 敏夫、小池 陽、須谷 記和(宇宙航空研究開発機構)
我那覇 義人、今 直樹(コスモテック株式会社)
原口 智裕( IHI エアロスペースエンジニアリング株式会社)
中村 晃祥(財団法人航空宇宙技術振興財団)
Calibration of the test section Mach number in the JAXA 2m x 2m Transonic Wind Tunnel
Masataka Kohzai, Makoto Ueno, Tatsurou Shiohara, Yukio Komatsu, Toshio Karasawa, Akira Koike, Norikazu Sudani (JAXA) Yoshito Ganaha, Naoki Kon (COSMOTEC)
Tomohiro Haraguchi (IHIAE) Akiyoshi Nakamura (JAST)
Key Words: Transonic Wind Tunnel, Flow calibration, Static pressure
Abstract
In the JAXA 2m x 2m Transonic Wind Tunnel, there have been more needs of wind tunnel users for high measurement accuracy to develop aircraft and launch vehicles with high performance. To achieve higher accuracy, more elaborate calibration tests to calculate freestream flow conditions have been conducted in this wind tunnel. To obtain test section Mach numbers exactly, test section static pressures must be mea- sured precisely. However, the measurement of test section static pressure is difficult for transonic flows, especially high subsonic flows because of probe nose effects, blockage effects, support interference, and so on. A series of calibration tests is conducted to optimize the static pressure probe for transonic flows and to determine the test section Mach number in the model location from the plenum chamber Mach number.
はじめに
JAXA 2m x 2m 遷音速風洞( JTWT )は国内で最も大 きな測定部断面積をもつ遷音速風洞の一つであり、唯一 の連続式遷音速風洞である。本風洞は飛行機やロケット の開発、空力的な基礎研究に多く使用されている。近年、
風洞ユーザから高度な研究開発を行う為に高精度な計測 データが要求されている。
高精度な計測データを取得する為には気流の状態を正 確に把握する必要がある。最も重要な気流状態の一つは 測定部マッハ数であり、測定部内のマッハ数を正確に把 握するには測定部内の静圧を正確に測定出来なければな らない。 JTWT では、プレナムチャンバーの静圧(プレ ナム静圧)と集合胴総圧から算出されたプレナムマッハ 数により測定部マッハ数を制御している。過去に図 1 に 示すような長さ 9000mm 、直径 100mm の中心プローブを 用いて測定部中心線上のマッハ数分布測定を行った。3 種類の集合胴総圧についてプレナムマッハ数に対する測 定部マッハ数とプレナムマッハ数の差を図 2 に示す。こ こで用いた測定部マッハ数は集合胴総圧と測定部静圧を
用いて算出した。これらのデータは約1分間スキャニバ ルブ( SV )によってスキャンした圧力を測定したデータ であり、気流の時間変動の影響を受けている為、これら のデータはバラツキが大きい。また、マッハ数 0.8 ~ 0.9 においては測定部マッハ数とプレナムマッハ数との差が
約 0.002 存在する。当時、この違いは重要視されなかった
為、測定部マッハ数の補正は行われていない。この差は 当風洞所有の標準模型の抵抗係数に換算すると約 5 カウン
ト( 0.0005 )に相当する。従って、計測精度を向上させ、
正確に測定部マッハ数の測定をすることが必要である。
過去の気流検定試験で使用した中心プローブは全長 9[m] であり、設置に非常に時間がかかる為、過密な風洞 試験スケジュールの中でこのプローブを用いて頻繁に試 験を行うことは難しい。本風洞試験設備における測定部 マッハ数検定試験を定期的に行う為には、測定部内に設 置出来る長さの静圧プローブによるマッハ数測定が必要 であり、基準となる静圧プローブを所有する必要がある。
しかし、現状では、様々な静圧プローブの形状について
の情報はあるが、それらの測定誤差の大きさや風洞測定
部への設置方法等に関する詳細な情報がない為、基準と
なる静圧プローブを所有しておらず、測定部静圧の測定 方法が定まっていない。また、遷音速領域、特に高亜音 速領域において、静圧プローブによる測定部静圧測定は 静圧プローブの頭部、ブロッケージの影響および支持干 渉等の影響の為に正確に測定することが非常に難しい
1, 2。 よって、遷音速領域における最適な静圧プローブ形状を 決定し、正確に測定部静圧を測定することが必要である。
本報告の目的は、 まず測定部静圧測定の計測精度を向上 させ、静圧プローブ形状の最適化を行う。さらに改善した 静圧測定方法により、 プレナムマッハ数に対する測定部マ ッハ数を明らかにし、マッハ数補正を行うことである。
測定部静圧測定方法の改善
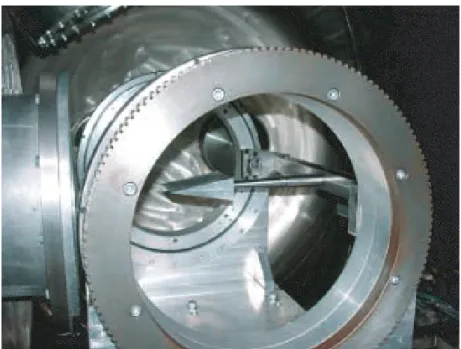
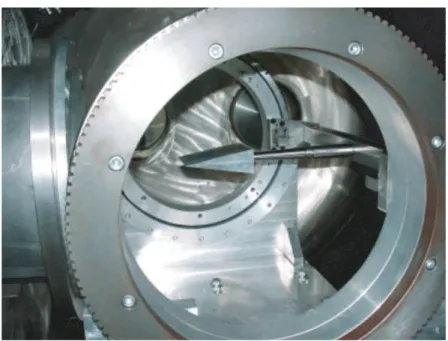
測定部静圧の測定を行う為に使用した静圧プローブの 設置状況を図 4 に、詳細を図 5 に示す。直径( d )が 5mm 、 先端は長さ 6d の Ogive 形状である。静圧孔は先端と円柱 の接合部から a だけ後方の位置の周方向に 4 点設けられ、
スティングによって支持されている。使用したスティン グは平行部直径 50.8mm 、長さ 850mm である。
まず、静圧測定精度を向上させる為に静圧プローブ
( a=15d, b=15d )を用いて、スキャニバルブ( SV )によっ て測定した圧力データとデジタルクオーツマノメータに よって測定した圧力データに関してバラツキの比較を行 う。次に、プローブ形状の最適化を行う為に、 a, b の長 さの異なるプローブを用いて風洞試験を行ったデータの 比較を行う。
1.測定部静圧の計測精度向上
図 6 は測定部静圧を SV で測定した時の集合胴総圧の時 間変化の影響を表したものである。通常、集合胴総圧、プ レナム静圧はデジタルクオーツマノメータで測定されて いる。圧力制御方法の影響により集合胴総圧は約 2 分間 周期で変動し、変化量は約± 0.2[kPa] である。それに伴 って測定部静圧、プレナム静圧も変化する。また、時間 図 1: 中心プローブ概要図
図 2: 測定部マッハ数とプレナムマッハ数の差
ਛᔃ䊒䊨䊷䊑䊂䊷䉺
㪄㪇㪅㪇㪇㪊 㪄㪇㪅㪇㪇㪉 㪄㪇㪅㪇㪇㪈 㪇 㪇㪅㪇㪇㪈 㪇㪅㪇㪇㪉 㪇㪅㪇㪇㪊 㪇㪅㪇㪇㪋 㪇㪅㪇㪇㪌 㪇㪅㪇㪇㪍
㪇 㪇㪅㪉 㪇㪅㪋 㪇㪅㪍 㪇㪅㪏 㪈 㪈㪅㪉 㪈㪅㪋 㪈㪅㪍
㪤㪶㫇㪺
㪤㪶㫃㫆㪺㪸㫃㪄㪤㪶㫇㪺
㪚㪸㫉㫋㩺㪈㩿㪧㪇㪔㪌㪏㪅㪏㪲㫂㪧㪸㪴㪀 㪚㪸㫉㫋㩺㪈㩿㪧㪇㪔㪎㪏㪅㪌㪲㫂㪧㪸㪴㪀 㪚㪸㫉㫋㩺㪈㩿㪧㪇㪔㪈㪇㪇㪲㫂㪧㪸㪴㪀 㪚㪸㫉㫋㩺㪊㩿㪧㪇㪔㪍㪇㪲㫂㪧㪸㪴㪀 㪚㪸㫉㫋㩺㪊㩿㪧㪇㪔㪏㪇㪲㫂㪧㪸㪴㪀 㪚㪸㫉㫋㩺㪊㩿㪧㪇㪔㪈㪇㪇㪲㫂㪧㪸㪴㪀
風洞試験設備概要
当風洞試験設備は 2m × 2m の測定部断面をもち、マッ ハ数 0.1 ~ 1.4 の範囲の試験が可能な連続循環式遷音速風 洞である ( 図 3) 。通常、亜音速領域では主送風機を使用 してマッハ数コントロールを行い、高亜音速以上の領域 は模型周辺でのチョークを避けるために補助送風機を併 用して抽気によりマッハ数のコントロールを行う。また 集合胴総圧は 50kPa ~ 140kPa で制御が可能であり、集 合胴総温度は 35 ℃~ 65 ℃の範囲について± 1 ℃で制御が 可能である。単位レイノルズ数の最大値は 20 × 10
6/m で ある ( 表 1) 。
図 3: JAXA 2mx2m 遷音速風洞概要図 表 1: 風洞性能
Mach Number 0.1 to 1.4
Max. Reynolds Number 20×106 [1/m]
Stagnation Pressure 50 to 140 [kPa]
Stagnation Temperature 308 to 338 [K]
Test Section Size 2×2×4.13 [m]
Construction 1960
䃂
㪚㪸㪹㫃㪼 㪚 㪸㪹 㫃㪼
䃂
㪝㫃㪼㫏㫀㪹㫃㪼㩷㪥㫆㫑㫑㫃㪼
䃂
㪧㫆㫉㫆㫌㫊㩷㫆㫉㩷㪪 㫃㫆㫋㫋㪼㪻㩷㪮 㪸㫃㫃㫊
䃂
㪮㫀㫅㪻㫆㫎
䃂
㪘㫀㫉㩷㪝㫃㫆㫎
䃂
㪚㪸㪹㫃㪼
䃂
㪥㫆㫑㫑㫃㪼㩷㪠㫅㫃㪼㫋
䃂
㪥㫆㫑㫑㫃㪼㩷㪜㫅㪻
㪇 㪈㪇㪇㪇 㪉㪇㪇㪇 㪊㪇㪇㪇 㪋㪇㪇㪇 㪌㪇㪇㪇 㪍㪇㪇㪇 㪎㪇㪇㪇 㪏㪇㪇㪇 㪐㪇㪇㪇 㪈㪇㪇㪇㪇 㪈㪈㪇㪇㪇
㐳ߐ 㐳ߐ9=m?
⋥ᓘ
⋥ᓘ100=mm?
変化の影響を調べる為に、 SV を 10 スキャンさせて測定 し、約 2 分間分の静圧データがプロットされている。図 7 は測定部マッハ数とプレナムマッハ数との差の時間変化 を表したものである。 SV で測定した場合には圧力センサ の精度が良くないことと、応答遅れの為に誤差が生じて いる。
測定圧力を SV にて測定する場合の応答性の影響を表し た結果を図 8 に示す。通常、集合胴総圧は集合胴に設置 されたピトー管の圧力配管、プレナム静圧はプレナム室 内のプレナム静圧検出部からの圧力配管を使用して風洞 外に設置されたそれぞれのマノメータで計測され、これ らの圧力からプレナムマッハ数の算出を行う。プレナム 静圧測定用の圧力配管が長いことと、この圧力配管を途 中で分岐して圧力センサのリファレンス圧力として使用 している為、 SV で切替えて測定された測定圧力とプレナ ム静圧の差圧( P_local )とプレナム静圧( P_pc )の同期 が取れていない。
そこで、図 9 のように測定圧力をプレナム静圧と同様 にマノメータにて測定を行ことにより圧力計測精度の改 善を行った。マノメータにて圧力測定を行う場合には、
マノメータが風洞外に設置されている為、配管長が約 20m となり、数秒程度の応答遅れが生じてしまう
3。応答 遅れを解消する為に、もう一台マノメータを使用して別 にプレナム静圧( P_pc2 )の測定を行った。測定用圧力
( P_local )とプレナム静圧( P_pc2 )の同期を取る為に、
両者の圧力配管の内径および配管長を同様にした。この ように測定した静圧を使用して、測定部マッハ数とプレ ナムマッハ数の差( M
local-M
pc)を算出した。 SV を使用し て静圧を測定した場合(図 7 )のバラツキ誤差が 0.0008 であったのが、マノメータを使用した場合(図 10 )のバ ラツキ誤差が 0.0002 と約4分の1になった。つまり、プ ローブ静圧測定用圧力配管とプレナム静圧測定用の圧力
配管の長さと内径を合わせて同期を取ることによりバラ ツキ誤差が大きく減少した。また、マノメータを使用す ることにより静圧測定精度が向上した。
図 4: 静圧プローブ設置状況
図 5: 静圧プローブ詳細
図 6: 気流の時間変動の影響
図 7: 気流の時間変動によるバラツキ誤差 㕒ሹ
a b 䉴䊁䉞䊮䉫 (㱢50[mm]) d=5[mm]
䊐䊧䉝ⷺᐲ: 6.6[deg]
Ogive ᒻ⁁
Cart#1, P0=81[kPa], M=0.9
47.8 47.9 48 48.1 48.2 48.3 48.4
10:05:40 10:05:57 10:06:14 10:06:32 10:06:49 10:07:06 10:07:24 Time
P_local, P_pc[kPa]
80.7 80.8 80.9 81 81.1 81.2 81.3
P0[kPa]
P_local P_pc P0
Cart#1, P0=81[kPa], M=0.9
-0.006 -0.005 -0.004 -0.003 -0.002 -0.001 0
10:05:40 10:05:57 10:06:14 10:06:32 10:06:49 10:07:06 10:07:24 Time
M_local-M_pc
80.7 80.8 80.9 81 81.1 81.2 81.3
P0[kPa]
M_local-M_pc P0
2.静圧プローブ形状の最適化
静圧プローブ形状の最適化を行う為に、異なる静圧プ ローブ形状で測定したデータの比較を行った。まず、図 5 における b の長さが 15d 一定で、 a の長さが 5d 、 10d 、 15d および 20d と異なる長さの静圧プローブを用いて測 定部静圧を測定し、マッハ数差に変換したデータで比較 を行った結果を図 11 に示す。一般に、 a の長さが 10d 、 15d 以上あれば先端の影響が無視できることが知られている 為、 10d 以降で一定になると予想される。しかし、 a の長 さが 20d のところでマッハ数差がマイナス側へシフトす る傾向が見られた。この原因は遷移の影響であると考え られるが、詳細については後述する。
図 8: 配管長による応答遅れの影響
図 9: マノメータ使用による応答遅れの改善
図 10: 改善した測定方法におけるバラツキ誤差
Cart#1, P0=81[kPa], M=0.9
-0.006 -0.005 -0.004 -0.003 -0.002 -0.001 0
10:26:15 10:26:33 10:26:50 10:27:07 10:27:24 10:27:42 10:27:59 time
M_local-M_pc
80.7 80.8 80.9 81 81.1 81.2 81.3
P0[kPa]
M_local-M_pc2 P0
㓸ว⢵
㓸ว⢵
䊒䊧䊅䊛ቶ 䊒䊧䊅䊛ቶ
᷹ቯㇱ
᷹ቯㇱ
ജ䉶䊮䉰
ജ䉶䊮䉰䍂㩷SV 䋨P_local䋩
᷹ቯജ
᷹ቯജ
䊙䉾䊊ᢙ▚
䊙䉾䊊ᢙ▚
䊙䊉䊜䊷䉺䋨
P0䋩 䊙䊉䊜䊷䉺䋨P_pc䋩 㓸ว⢵✚
㓸ว⢵✚
䋨䊏䊃䊷▤䋩
䊒䊧䊅䊛㕒ᬌㇱ
䊒䊧䊅䊛㕒ᬌㇱ䋨ㅢ⒓䈤䉊䈉䈤䉖䋩
㓸ว⢵
㓸ว⢵
䊒䊧䊅䊛ቶ 䊒䊧䊅䊛ቶ
㓸ว⢵✚
㓸ว⢵✚
䋨䊏䊃䊷▤䋩
䊙䊉䊜䊷䉺䋨
P_pc䋩
᷹ቯㇱ
᷹ቯㇱ
ౝᓘ䋺
ౝᓘ䋺
0.8mm㈩▤㐳䋺 ㈩▤㐳䋺20䌭
䊙䊉䊜䊷䉺㩿
P_pc2䋩
᷹ቯജ
᷹ቯജ
䊙 䉾 䊊 ᢙ Ꮕ 䋨
䊙 䉾 䊊 ᢙ Ꮕ 䋨
M_local-M_pc䋩
ౝᓘ䋺 ౝᓘ䋺0.8mm
㈩▤㐳䋺
㈩▤㐳䋺
20䌭 䊒䊧䊅䊛㕒ᬌㇱ
䊒䊧䊅䊛㕒ᬌㇱ䋨ㅢ⒓䈤䉊䈉䈤䉖䋩
䊙䊉䊜䊷䉺㩿P_local㪀
䊙䊉䊜䊷䉺䋨
P0䋩
次に、 a の長さが 10d 一定で、 b の長さが 5d 、 10d 、 15d および 20d と異なる長さのプローブを用いて、先ほどと 同様に測定されたマッハ数差のデータで比較を行った結 果を図 12 に示す。 b は約 15d で十分だと予想されたが、
この長さでもまだ支持部の影響が見られる。このことか らさらに長いプローブを用いて静圧の測定試験をする必 要がある。
また、過去の中心プローブで測定されたデータとの比 較を図 13 に示す。中心プローブで測定されたマッハ数差 と静圧プローブで測定されたマッハ数差では最大約 0.01 の差が存在する。この差の原因としては、プローブのブ ロッケージの影響と支持部分の影響が考えられる。中心 プローブのブロッケージは 0.2 %であり、静圧プローブの ブロッケージ 0.0005 %よりかなり大きい。静圧測定に中 心プローブを用いた場合には先端がノズル上流にあるが、
測定部内の気流はブロッケージの影響を受けている。静 圧測定に静圧プローブを用いた場合には、スティングお よびスティングと接合されているフレア部分は静圧孔位 置の気流に影響を与える。その為、これらの影響につい て調べる必要がある。
そこで、二次元軸対称のオイラー方程式に基づく CFD
4を用いて今回使用した静圧プローブ上のマッハ数分布の 計算結果を図 14 に示す。静圧プローブ上マッハ数は静圧 プローブの下流に行くに従って徐々に低くなっている。
特にマッハ数 0.95 ではプローブ上のマッハ数が一様流マ ッハ数に比べて約 0.005 低い。これらのことから今回使用 した静圧プローブで測定した静圧は支持部分の影響を受 けていることが分かる。高亜音速における静圧測定にお いては、使用する静圧プローブの静圧孔下流、特に支持 部分の影響を受けやすいことを考慮する必要がある。
適切な静圧プローブの支持部分の形状を決定する為に は静圧プローブとスティングの位置関係が重要である
(図 15 )。静圧孔と支持部分の距離を支持部直径の 15 倍
(15D) 距離をとることにより、静圧孔で測定される静圧
は支持部の影響を受けない
5。支持部のフレア角度は以下 の式から求められる。
tan 1 /2 . 1 909 15
D θ≤ − D=
ここでθは支持部のフレア角度であり、 D は支持部(ス ティング)の直径である。ここで測定される静圧は、静 圧プローブとフレア部の接合部が自動的に静圧孔から 15 倍下流( 15d )に位置するため、この接合部の影響も受け ない。
支持部のフレア角度を 1 度としたときの静圧プローブ 上のマッハ数を CFD により再計算した結果を図 16 に示 す。静圧孔位置における一様流マッハ数と静圧プローブ 上マッハ数との差は 0.0002 以下になった。この形状の静 圧プローブを使用することによって測定部内静圧が正確 に測定できる。
改善した静圧プローブを用いて測定部マッハ数の測定 を行った結果を図 17 に示す。用いた静圧プローブは、支 持部のフレア角度を1度に変更した以外は前回の静圧プ ローブと形状が全く同じである。静圧プローブで測定し た静圧、プレナム静圧についても先述と同様の測定方法 で試験を行った。図 18 にプレナムマッハ数に対する測定 部マッハ数とプレナムマッハ数の差を示す。改善した静 圧プローブで測定したマッハ数差のデータは、先述の静 圧プローブデータに比べて、中心プローブデータ側へシ フトした。この変化量は CFD の計算結果とほぼ一致した 為、プローブ形状の改善によりスティング支持の影響を 取り除くことが出来た。しかし、中心プローブデータと 改善した静圧プローブデータの違いが約 0.002 存在する。
このことから両者のデータの差はさらに下流に位置する スティングポッドから受ける影響の違いであると考えら れる。
スティングポッドの静圧測定値に対する影響を把握す る為に、中心プローブと改善した静圧プローブについて の比較を図 19 に示す。まず、静圧測定位置(模型中心位 置)とスティングポッドの距離がスティングポッドの直 径の約 6 倍( 6D' )である為、どちらのプローブを使用し ても静圧孔の位置ではスティングポッドの影響を受ける。
その為、スティングポッドの影響は、プローブとスティ ングポッド接合部の直径によって影響の度合いが異なる。
静圧プローブの断面積の方がスティングに近い為、模型 を入れた風洞試験に近い状態、つまりスティングポッド の影響込みのマッハ数測定が可能である。
また、静圧プローブの気流軸に対する傾きの影響を調 べる為に、マッハ数 0.8 、集合胴総圧 80kPa の場合とマッ ハ数 0.9 集合胴総圧 100kPa の場合について静圧プローブ のピッチ角を -0.5 ~ 0.5[deg] に変化させた時のマッハ数 差データを図 20 に示す。どちらの場合についてもマッハ 数差の変化は± 0.0005 以下であり、気流軸からの傾きに 対する影響はほとんどないことが分かる。また、過去の 試験結果より気流偏角が 0.1[deg] 以下であることから、
静圧プローブの取り付け誤差、静圧プローブのたわみ、
気流偏角の影響は無視できる。
図 11: a の長さの異なるプローブ比較( b=15d )
図 14: CFD による静圧プローブ上のマッハ数分布計算結
果
図 12: b の長さの異なるプローブの比較( a=10d )
図 13: 中心プローブデータと静圧プローブデータの比較
図 15: プローブ支持部の静圧測定データに対する影響
図 16: CFD による改善した静圧プローブ上のマッハ数分
布計算結果
図 17: 改善した静圧プローブ設置状況
Cart#1, P0=81[kPa]
-0.008 -0.006 -0.004 -0.002 0 0.002 0.004 0.006 0.008
0 5 10 15 20 25
a
M_local-M_pc
M=0.6 M=0.7 M=0.8 M=0.9 M=0.95
Cart#1, P0=81[kPa]
-0.016 -0.014 -0.012 -0.01 -0.008 -0.006 -0.004 -0.002 0
0 5 10 15 20 25
b
M_local-M_pc
M=0.6 M=0.7 M=0.8 M=0.9 M=0.95
Cart#1, P0=81[kPa]
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
M_pc
M_local-M_pc
Static pressure probe (without bleeding) Static pressure probe (with bleeding) Centerline probe (STA7847)
Mach number on the probe
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02
0 5 10 15 20 25 30
the distance downstream of the shoulder divided by the diameter
M_local-M_infinite
㼺M=0.005
6.6ᐲ
㕒ሹ
M=0.7 M=0.8 M=0.9 M=0.95
d/2
15D
15d
θ
D/2䉴䊁䉞䊮䉫 䊒䊨䊷䊑
㕒ሹ
Mach number on the probe
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02
0 5 10 15 20 25 30
the distance downstream of the shoulder divided by the diameter
M_local-M_infinite
㼺M㻡0.0002
1
ᐲ
㕒ሹ
M=0.7 M=0.8 M=0.9 M=0.95
測定部マッハ数検定試験結果
マッハ数を 0.2 ~ 1.4 、集合胴総圧を 80kPa 、 100kPa そし
て 120kPa と変化させたときのプレナムマッハ数に対する
マッハ数差を図 21 に示す。亜音速域については、集合胴総 圧を大きくするにつれてあるマッハ数から測定部マッハ数 が下がる現象がみられる。また、超音速域についてマッハ 数変化に対するマッハ数差の変化量が大きい。さらに、マ ッハ数 0.8 ~ 0.99 については抽気を行う場合と行わない場 合のデータ比較を行った。両者のデータの差は 0.001 以下 となり、抽気の影響はほとんどないことが確認された。
亜音速域において集合胴総圧が大きくなるにつれてマッ ハ数差がシフトする原因を調べる為に、集合胴総圧を
50kPa から 140kPa に変化させたときのプレナムマッハ数
に対するマッハ数差を図 22 に示す。集合胴総圧が大きく なるにつれて低いマッハ数でシフトすることが分かる。 原 因として、 プローブ上で層流から乱流に遷移した影響が考 えられる。遷移の影響を調べる為に、模型先端にラフネス として O リングを取り付けて静圧データを取得した結果 を図 23 に示す。総圧が大きくなるにつれあるマッハ数で シフトする変化がなくなった。しかし、全ての値が減速側
に 0.002 程度シフトした為、これらのデータを用いてキャ
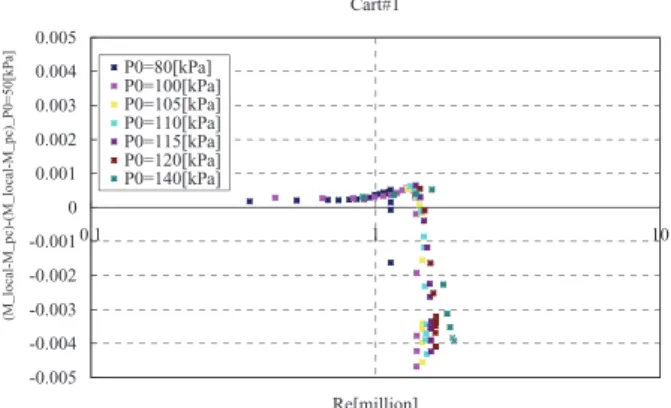
リブレーションを行うことは出来ない。また、レイノルズ 数 効 果 を 調 べ る 為 に 遷 移 の 起 こ ら な い デ ー タ
( P0=50[kPa] )との差を取った結果を図 24 に示す。静圧孔 位置のレイノルズ数が約 1 ~ 2[million] の値で遷移してい ると思われる。 このことから遷移前のデータを下にマッハ 数校正テーブルを作成する必要がある。図 25 に示すよう に遷移前のデータのみを使用し、 P0 = 50 、 80 、 100[kPa]
に つ い て 作 成 し た マ ッ ハ 数 補 正 関 数 を 表 2 に 示 す 。 P0=80kPa では M ≧ 0.88 で補正が必要であることが分かる。
超音速域について、遷音速域について示したものと同 様の結果を図 26 に示す。プレナムマッハ数に対するマッ ハ数差の変化が単調ではなく変化量も大きい。その傾向 は P0 を変化させても一致している。この変化の原因を調 べる為に、ポーラス壁からの衝撃波の影響について調べ た。マッハ数 1.1 ~ 1.4 について、静圧プローブを高さ方 向にポーラス壁からの格子1格子分の範囲についてスイ ープさせたデータを取得した結果を図 27 に示す。これら のデータについては周期性が見られ、バラツキ( 2 σ)は
約 0.002 以下である。図 26 におけるエラーバーはこのバ
ラツキが表されている。ポーラス壁からの衝撃波が、プ レナムマッハ数に対するマッハ数差の大きな変化をもた らす原因ではない。現時点では、この変化の原因は明ら かには分かっていない。従って、これらのデータにより 作成したマッハ数補正テーブルを表 3 に示す。
図 18: 改善した静圧プローブデータ、静圧プローブデー
タおよび中心プローブデータの比較
図 19: スティングポッドの静圧測定データに対する影響
図 20: 静圧プローブの気流軸に対する傾きの影響
Cart#1, P0=81[kPa]
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
M_pc
M_local-M_pc
optimized static pressure probe (without bleeding) optimized static pressure probe (with bleeding) static pressure probe (without bleeding) static pressure probe (with bleeding) Centerline probe (STA7847)
⚂ 6D’
㕒ሹ
D’/2
ਛᔃ䊒䊨䊷䊑
ਛᔃ䊒䊨䊷䊑 䊶⋥ᓘ:㩷100mm 䊶䊑䊨䉾䉬䊷䉳: 0.2%
ᡷༀ䈚䈢㕒䊒䊨䊷䊑 ᡷༀ䈚䈢㕒䊒䊨䊷䊑 䊶⋥ᓘ:㩷5mm
䊶䊑䊨䉾䉬䊷䉳: 0.0005%
䉴䊁䉞䊮䉫䊘䉾䊄 䉴䊁䉞䊮䉫䊘䉾䊄 䊶⋥ᓘ:㩷220䌾240mm 䊶䊑䊨䉾䉬䊷䉳: 1.1%
10[deg]
10[deg]
Cart#1
-0.0025 -0.002 -0.0015 -0.001 -0.0005 0 0.0005 0.001 0.0015 0.002 0.0025
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
M_local-M_pc
M=0.8, P0=80[kPa]
M=0.95, P0=100[kPa]
図 21: 改善した静圧測定方法による測定部マッハ数とプ レナムマッハ数の差
図 24: 遷移レイノルズ数の影響
図 22: 集合胴総圧変化の影響( M<1 ) 図 25: マッハ数補正用データ
図 23: ラフネスの有無の影響 図 26: マッハ数差データ( M ≧ 1 )
Cart#1
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
M_pc
M_local-M_pc
without bleeding (P0=80[kPa]) with bleeding (P0=80[kPa]) without bleeding (P0=100[kPa]) with bleeding (P0=100[kPa]) without bleeding (P0=120[kPa])
Cart#1
-0.005 -0.004 -0.003 -0.002 -0.001 0 0.001 0.002 0.003 0.004 0.005
0.1 1 10
Re[million]
(M_local-M_pc)-(M_local-M_pc)_P0=50[kPa]
P0=80[kPa]
P0=100[kPa]
P0=105[kPa]
P0=110[kPa]
P0=115[kPa]
P0=120[kPa]
P0=140[kPa]
Cart#1
-0.005 -0.004 -0.003 -0.002 -0.001 0 0.001 0.002 0.003 0.004 0.005
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
M_pc
M_local-M_pc
P0= 50[kPa] P0= 80[kPa]
P0=100[kPa] P0=105[kPa]
P0=110[kPa] P0=115[kPa]
P0=120[kPa] P0=140[kPa]
Cart#1
-0.005 -0.004 -0.003 -0.002 -0.001 0 0.001 0.002 0.003 0.004 0.005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
M_pc
M_local-M_pc
P0=50[kPa]
P0=80[kPa]
100[kPa]㻡P0㻡140[kPa]
Cart#1, 䊤䊐䊈䉴
-0.005 -0.004 -0.003 -0.002 -0.001 0 0.001 0.002 0.003 0.004 0.005
0.7 0.75 0.8 0.85 0.9 0.95 1
M_pc
M_local-M_pc
P0=50[kPa]
P0=80[kPa]
P0=100[kPa]
P0=120[kPa]
P0=50[kPa] 㩿䊤䊐䊈䉴ή㪀
Cart#1
1 1.1 1.2 1.3 1.4
M_pc -0.015
-0.01 -0.005 0 0.005 0.01 0.015
M_local-M_pc
with bleeding (P0=50[kPa]) with bleeding (P0=80[kPa]) with bleeding (P0=100[kPa])
結論
測定部静圧とプレナム静圧の同期を取る為に、両者の 圧力配管の長さと内径を揃えて 2 台のクオーツマノメー タで測定を行うことにより静圧の測定精度が向上した。
また、静圧プローブの形状を変化させた特性を把握し、
静圧プローブの支持部の影響を考慮することにより、静 圧プローブの最適化を行った。さらに第1カート(ポー ラス壁)について、改善した静圧プローブを用い、改善 した静圧測定方法で測定部静圧を測定することにより、
プレナムマッハ数に対する測定部マッハ数のキャリブレ ーションを行った。このキャリブレーション結果を用い てマッハ数補正を行うことにより測定部マッハ数を正確 に把握することが可能となった。
図 27: ポーラス壁からの衝撃波の影響
Cart#1, P0=80[kPa]
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008
-80 -60 -40 -20 0 20 40 60 80
height [mm]
M_local-M_pc
M=1.1 M=1.2 M=1.3 M=1.4
表 3: マッハ数補正テーブル( Cart #1, M ≧ 1 )
M_pc 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
M_local (P0=50[kPa]) 1.0030 1.0390 1.1010 1.1570 1.2050 1.2610 1.2990 1.3410 1.4050 M_local (P0=80[kPa]) 1.0050 1.0370 1.1010 1.1580 1.2070 1.2640 1.3030 1.3420 1.4050 M_local (P0=100[kPa]) 1.0010 1.0400 1.1010 1.1560 1.2070 1.2650 1.3040 1.3420 1.4050
参考文献
1. T. D. Reed, T. C. Pope, and J. M. Cooksey: Calibration of Transonic and Supersonic Wind Tunnel, NASA Con- tractor Report 2920
2. D.W. Bryer and R.C. Pankhurst: Pressure-probe meth- ods of determining wind speed and flow direction, Na- tional Physical Laboratory, Her Majesty ’ s Stationery Office, London, 1971
3. 上野真 , 須谷記和 , 香西政孝 , 我那覇義人 , 今直樹 : 風 洞基準圧力計測配管の圧力応答シミュレーションによ る最適化 , JAXA RR-0537
4. James J. Quirk: AMRITA-A Computational Facility (for CFD Modelling), VKI LS 1998-03: 29
thcomputational fluid dynamics
5. Chevalier, H.L.: Calibration of the PWT 16-Ft. Tran- sonic Circuit with a Modified Model Support System and Test Section, AEDC TN-60-164
表 2: マッハ数補正関数( Cart #1, M < 1 )
M_local (P0=50[kPa]) 0.017750M_pc4-0.026745M_pc3+0.017343M_pc2+0.994084M_pc M_local (P0=80[kPa]) 0.016240M_pc4-0.022515M_pc3+0.013784M_pc2+0.995489M_pc M_local (P0≧100[kPa]) 0.019575M_pc4-0.025175M_pc3+0.013554M_pc2+0.996071M_pc
![図 11: a の長さの異なるプローブ比較( b=15d ) 図 14: CFD による静圧プローブ上のマッハ数分布計算結果 図 12: b の長さの異なるプローブの比較( a=10d ) 図 13: 中心プローブデータと静圧プローブデータの比較 図 15: プローブ支持部の静圧測定データに対する影響図 16: CFD による改善した静圧プローブ上のマッハ数分布計算結果 図 17: 改善した静圧プローブ設置状況Cart#1, P0=81[kPa]-0.008-0.006-0.004-0.0](https://thumb-ap.123doks.com/thumbv2/123deta/6804187.2229247/13.892.481.818.148.307/プローブプローブプローブプローブデータプローブデータプローブ.webp)