上智大学理工学部物理学科 大槻東巳
目 次
第1章 はじめに 1 1.1 相転移とは . . . . 1 第2章 相転移の一般論 4 2.1 相図 . . . . 4 2.2 臨界指数 . . . . 4 2.3 モデル化 . . . . 7 2.4 平均場近似 . . . . 8 2.4.1 平均場近似での臨界指数 . . . . 10 2.4.2 平均場近似での相関長 . . . . 12 2.5 臨界次元 . . . . 15 2.6 2Dイジングモデルの転移点 . . . . 16 第3章 繰り込み群とスケーリング 18 3.1 ブロックスピン変換 . . . . 18 3.1.1 例:1次元イジングスピン系 . . . . 19 3.2 繰り込み群の一般論 . . . . 22 3.3 スケーリングと臨界指数 . . . . 23 3.3.1 相関関数のスケーリング関係式 . . . . 25 3.4 有限サイズスケーリング . . . . 26 3.5 他の問題への応用 . . . . 28 第4章 統計力学と量子力学 31 4.1 経路積分 . . . . 31 4.2 統計力学との接点 . . . . 33第
1
章 はじめに
20世紀後半から,コンピュータは急速に高速化,大容量化した。コン ピュータは,単純な計算を膨大におこなうことを得意とする。そこで近年, 注目を集めているのが計算物理である。 従来,物理学は,理論物理学,実験物理学の2本立てで発展してきた。 この計算物理は第3の物理学の柱と言われている。どうして計算機を使う 手法が物理の研究に向いているかというと, 1. 法則が単純で,その割りに結果が予想できない現象が数多く存在 する。 2. 計算機の能力の向上が倍々ゲームなのに比べて,人間の脳,理論・ 実験物理の手法は,ペースが遅い 3. 予算がかからない 4. 環境に負荷がかからない からである。 計算機を使った物理には2種類ある。一つは解析的には解けない方程式 を解くもので,もう一つは,コンピュータ上で実験をするというものであ る。後者はシミュレーション物理とも言われる。 本講義では,相転移をテーマに,このシミュレーション物理を学ぶ。前 半は相転移の一般理論を学び,後半はコンピュータ教室で実際にシミュ レーションを行い,磁性の相転移をコンピュータ上で再現する。1.1
相転移とは
系をどんどん小さく分割していくと、物の性質はどうなるであろう?水 は半分にしても水であるが、これを続けていくとやがて水分子というマク ロな水とは似ても似つかない物になる。このように、ある長さのスケール から物の性質が違ってくる。この長さを相関長、ξとなづける。 ξ: fluctuationが相関を持つ長さ十分大きな系(L→ ∞)で温度、密度などを変えると相転移が起こる場 合がある。このとき、2次以上の相転移ではξが発散する。このξ → ∞ を積極的に利用するのが、この授業で解説する繰り込み群とスケーリング である。この際、べき乗則が普遍的にみられる。このスケール普遍性とべ き乗という考えがどのように結びつくか、古典力学の例で見てみよう。 今、長さのスケールをr′= αrとしたとき、時間のスケールがt′ = αst と変換すれば、物理現象が同じに見えるようにする。ニュートンの第2法 則は ¨ r′ = α−(2s−1)r¨ ここで惑星の運動を考えてみよう。このとき、r = A/r¨ 2なので ¨ r′ = α−(2s−1)A r2 = α −2s+3 A r′2 となる。よって、s = 3/2とすれば、惑星の運動がスケール不変になる。 これより、 t′ = α3/2t , r′= αr となることからどのようなスケールを選んでも t2/r3= constant となる。これはケプラー則に他ならない。 このように単純なスケール変換で実は多くの物理現象が理解できるの である。これを限界まで利用するのが近年の統計力学の理論である。本講 義では、はじめに相転移の一般的な性質と平均場近似について主に磁性体 を例に取りながら説明し、その後、スケーリングや繰り込み群について解 説する。その後,場の理論と統計力学を経路積分を使って関係付ける。そ の後,実際にコンピュータシミュレーションを行い,相転移を具体的に調 べる。 次元解析が出てきたついでに 物理量f (x1, x2,· · · , xn)を考える。ここで変数xiのうち,はじめのk 個は独立な次元とする。f (a1, a2,· · · , ak, b1, . . . , bm)。m = n− k である。 物理量fの次元解析より,無次元量 Π = f (a1, a2,· · · , ak, b1, . . . , bm) aα1 1 a α2 2 · · · a αk k = Π(a1, a2,· · · , ak, b1, . . . , bm) (1.1) が作れる。このΠの変数は, Π = Π ( b1 aα11 1 a α21 2 · · · a αk1 k , b2 aα12 1 a α22 2 · · · a αk2 k ,· · · ) (1.2)
という無次元量のみである。これを バッキンガムのΠ定理と呼ぶ。 例1;ケプラーの第3法則 惑星の周期Tは軌道半径r,太陽の質量M,万有引力定数Gの関数とする。 T = T (r, M, G) [r] = L, [M ] = M, [G] = M−1L3T−2なので, T (r, M, G) = (M G/r3)−1/2Π(変数なし)∝ r3/2(M G)−1/2 最後の式で第1項はケプラーの法則を,第2項は重い天体の周りほど,惑 星は早く回転することを示す。 例2;振り子の周期T T は振り子の長さl,振り子の振幅a,および重力加速度gの関数とする。 つまり,T = T (l, g, a)。よって,T = g−1/2l1/2Π(a/l)。a/l≪ 1の場合, これを0とみなし, T ∝ √ l g 厳密に運動方程式を解くと T = 4 √ l g ∫ π/2 0 dα √ 1− k2sin2α = 4 √ l gf (k) f (k)は第1種完全楕円積分と呼ばれる。ただし,k = sin(θ0/2),θ0は最 大角でθ0 = a/lであるので,確かにT = g−1/2l1/2Π(a/l)の形になって いる。 例3;長い管を通る液体による力 圧力勾配を dp dx = f (v, D, ρ, µ) とする。vは液体の速さ,Dは管の直径,ρは液体の密度,µは粘性である。 [ dp dx ] = M L−2T−2, [v] = LT−1, [D] = L, [ρ] = M L−3, [µ] = M L−1T−1 これより, dp dx = ρv2 D Π ( µ ρvD ) なお,無次元量ρvD/µはレイノルズ数と呼ばれる。
第
2
章 相転移の一般論
2.1
相図
例として強磁性−常磁性相転移を眺めてみよう。温度を変えていくとあ るところで磁化が、0磁場でも有限になる。これが強磁性−常磁性相転移 である。 この模様をT − H面で見てみると以下のようになる。 温度を一定にして磁場Hを変えていくと、Mに対して3通りの振る舞 いが見られる。T < Tcでは磁化がH =±0で不連続に飛ぶ。T = Tcでは 連続的であるが、関数形が解析的でない。T > Tcでは関数形が解析的と なる。 興味深いのはH = 0の周りで±M0の二つの値が見られるということ である。これは自発的対称性の破れと名づけられていて、物理のいたると ころに見られる現象である。 磁化Mが転移があるか、ないかを特徴づけるのでこれを秩序パラメー タと呼ぶ。 p T 0 100 solid liquid gas critical point (a) H T Tc (1) (2) (3) (b) 図2.1: 水の相図と磁石の相図(H− T面)M H (1) M H (2) M H (3) 図2.2: M− H面
2.2
臨界指数
こうした相転移を特徴づけるのが臨界指数である。仮に転移点からの距 離を tdef= T − Tc Tc (2.1) hdef= H kBTc = βcH (2.2) とおく。このとき、臨界指数は以下のように定義される。 1. 比熱の異常を示す臨界指数α C∼ |t|−α (2.3) αは転移の前後で等しい。 2. 自発磁化の立ち上がりを示す臨界指数β M ∼ (−t)β (2.4) 3. 帯磁率の異常を示す臨界指数γ χdef= ( dM dH ) H=0 ∼ |t|−γ (2.5) γは転移の前後で等しい。 4. 転移点Tc直上での磁化の磁場依存性を表すδ M ∼ |h|1/δ (2.6)5. 物理量A(r)の相関を ⟨A(r)A(0)⟩ = G(r) とする。G(r)は相関関数である。このとき、多くの場合、 G(r)∼ e−r/ξ (2.7) となっている。そこでこのξを相関長と定義する。相関長の発散を 示す臨界指数νは ξ∼ |t|−ν (2.8) で定義される。νは転移の前後で等しい。 6. 転移点では相関関数が指数関数でなく G(r)∼ 1 rd−2+η (2.9) となっている。Aを密度として上の式で定義されるのがηでこれは フラクタル次元と関係している。 7. 系が平衡状態からずれたら、もとに回復するのが指数関数的に起こ る。このとき、 δA(t) = e−t/τ (2.10) で緩和時間を定義できる。この緩和は転移転付近ほど遅い。なぜな ら転移点では秩序を作ろうか、無秩序状態になろうか、迷っている からである。よって、τも転移点で発散する。そこで τ ∼ ξz (2.11) で動的臨界指数を定義する。 Problem 2.1 水の3相の相図をp− T面で描け。次にp− ρ(ρは密度)面 で状態方程式を描け。転移点直上の圧力、密度をpc, ρcとおくと(pc=218 気圧,Tc=647K)、 H↔ p − pc, M ↔ ρ − ρc という対応がつく。このとき、α, β, δはどう定義されるか? 実はこのα, β, δが水と磁性体で同じなのである。これが普遍性 (univer-sality)である。
2.3
モデル化
通常の物理ではある現象を説明するために、モデル化を行い、それに よって出た誤差を訂正するために、さらにモデルを改良するというステッ プを踏む。ところが相転移の統計力学は、ある簡単なモデルが厳密に正し くなることがある。つまり相転移転付近では、無視した項がどんどん小さ くなり、考慮する必要がなくなるのである。そこで、単純かつ本質を突い たモデルが必要となる。 磁性体の最も単純なモデルは以下のハミルトニアンで与えられる。 H = −1 2 ∑ r,r′ J (r, r′)s(r)· s(r′)− µ∑ r B· s(r) (2.12) これはnベクトルモデルと呼ばれる。nはスピンの成分の数である。 |s(r)| = 1とする。 1. n = 1の場合、sz =±1のみを考える。これはイジング(Ising)モデ ルである。 2. n = 2の場合、スピンは平面上の単位円上にある。これはXYモデ ルと呼ばれる。 3. n = 3の場合、スピンは単位球上にある。これはハイゼンベルク (Heisenberg)モデルと呼ばれる。 4. 一般のnは現実的でないと思うかもしれないが、実はn = 0という おかしな極限が高分子の物理と関係している。 こんどは液体-気体相転移をモデル化しよう。N粒子がr1,· · · , rN にい るときのエネルギーを H =∑ i<j V (|ri− rj|) とする。このとき、大分配関数は Ξ =∑ N eβN µ N ! ∫ d3r1· · · d3rNexp[−β ∑ i<j V (|ri− rj|)] (2.13) ここでモデル化を行う。空間は格子にきってしまう。粒子間の斥力は二つ の粒子が同じ位置にこられないという条件に置きかえる。サイトrにいる 粒子の個数をn(r) = 0, 1とし、相互作用を V (|ri− rj|) → −2J(ri, rj)n(ri)n(rj)とおくと、 Ξ = ∑ {n(r)=0,1} eβµ ∑ rn(r)exp[2β ∑ r̸=r′ J (r, r′)n(r)n(r′)] (2.14) となる。 s(r) = 2n(r)− 1 とすると、 Ξ = ∑ {s(r)=±1} eβµ ∑ r(s(r)+1)/2exp[2β ∑ i<j J (r, r′)(s(r)+1)(s(r′)+1)/4] = ∑ {s(r)=±1} e−βH (2.15) H = −(µ/2 + J′)∑ r s(r)− 1 2 ∑ r,r′ J (r, r′)s(r)s(r′) (2.16) これは磁場中のイジングモデルと同じである。イジングを馬鹿にしてはい けない。 Problem 2.2 元素Aと元素Bからなる化合物のエネルギーを、イジング モデルのように書き表せ。(Aどうしが隣り合うときのエネルギーをJAA、 Bどうしが隣り合うときのエネルギーをJBB、ABが隣り合うときのエネ ルギーをJABとおく)
2.4
平均場近似
平均場近似とは、粒子密度やスピンの揺らぎを無視するものである。も ちろん近似であり、厳密解や繰り込み群による解析と比べると正確さにか けるが、簡単で直感的に分かりやすいという特徴がある。しかも出てきた 解(相)がどんなものかを教えてくれる。この節では平均場近似について、 復習がてら説明する。 磁場中のスピンのハミルトニアンは H = −1 2 ∑ r,r′ J (r, r′)s(r)· s(r′)− µB ·∑ r s(r) (2.17) となる。µB = Hとおいてイジングモデル(sz = ±1)を考えると、分配 関数は Z = ∑ {s(r)} exp(β 2 ∑ r,r′ J (r, r′)s(r)· s(r′) + βH∑ r s(r)) (2.18) ここでm =⟨s(r)⟩として、 s(r)s(r′) = (m + s(r)− m)(m + s(r′)− m) (2.19) ≈ m2+ m(s(r)− m) + m(s(r′)− m) (2.20)とすると、分配関数の指数部分は −β 2N J m 2+ β(J m + H)∑ r s(r) となる。ここで J =∑ r′ J (r, r′) (2.21) とした。N は全格子点の数である。この近似では揺らぎを無視したので 相関長が短いとしていることに注意。こうして分配関数は Z = ∑ {s(r)} exp(−β 2N J m 2+ β(J m + H)∑ r s(r)) (2.22) = e−NβJm2/2[2 cosh β(J m + H)]N (2.23) となる。これより格子点あたりのヘルムホルツの自由エネルギーは f =−kBT N log Z = J m2 2 − kBT log{2 cosh[β(Jm + H)]} (2.24) となる。mの決め方は二通りある。⟨s⟩H(m)として両辺が等しくなるよう に決めるのと、自由エネルギーが最小になるように決めるやり方である。 前者は3年生の授業でやったので、ここでは後者でやる。(2.24)をmで 微分し、 0 = df dm = J m− J tanh β(Jm + H) より、 m = tanh β(J m + H) (2.25) となる。これがmを決める方程式である。 H = 0のとき、m̸= 0となるにはβJ > 1が必要だということは学部の ときやった。ここでは自由エネルギーという観点から眺めてみる。mが小 さいとき、 fMFA(H = 0)≈ Const. + 1 2J (1− βJ)m 2+ O(m4) +· · · (2.26) となるので、この関数形が極小値をもつのは kBT < kBTcMFA= J (2.27) である。こうして臨界温度が決まる。
F M 0 (a) M F 0 (b) 図2.3: T > Tc, T < Tcでの自由エネルギーの形。H = 0の場合。 0 F M (a) 0 F M (b) 図2.4: T > Tc, T < Tcでの自由エネルギーの形。H ̸= 0の場合。
2.4.1
平均場近似での臨界指数
次に平均場近似を用いて臨界指数を計算する。(2.24)をm, Hが小さい として展開すると、β(J m + H) = xとおいて f ≈ J m 2 2 − kBT log 2− kBT log(1 + x 2/2 + x4/24) ≈ g(T ) +1 2J (1− βJ)m 2− βJmH + β3J4m4 12 となる。これを fMFA(m, H) = a(T ) + btm2+ cm4− dHm (2.28) とかく。これがギンツブルク(Ginzburg)の自由エネルギーである。 t = T− Tc Tc (2.29) でこれは臨界点からのずれを表す。この自由エネルギーの表式から臨界指 数を求めよう。1. H = 0, t < 0として、0 = dfMFA(m,0) dm より、m ∼ (−t)1/2となる。 (2.4)から β = 1 2 となる。 2. H > 0, t > 0として、磁化0 = dfMFA(m,H) dm より、2btm = dH, χ = m/H ∼ 1/tとなる。(2.5)から γ = 1 となる。 3. t = 0として、磁化0 = dfMFA(m,H) dm より、m∼ H 1/3となる。(2.6) から δ = 3 となる。 4. 比熱は微妙である。t > 0ではm = 0なので fMFA(t > 0) = a(T ). 一方、t < 0ではm≈ √ −bt 2c なので、 fMFA(t < 0) = a(T )− b2t2 4c . となる。比熱は CV = T dS dT =−T ∂2F ∂T2 なので、不連続な飛びがあることになる。よって(2.3)から α = 0 となる。 以上はイジングスピン系についての結果である。N−ベクトル模型では 例えばH = 0の場合、 fMFA= A(T ) + bt N ∑ a=1 m2a+ c( N ∑ a=1 m2a)2+· · · (2.30) となる。t < 0で自由エネルギーの最小値が現れるのはイジングと同じ だが、N ≥ 2だと、秩序パラメータmの向きが連続的に変われることに 注意。
2.4.2
平均場近似での相関長
スピンとスピンの相関は場所0でスピンがs(0)を向いているとき、rで のスピンの値がどうなるかを表す。数学的には G(r) =⟨s(r)s(0)⟩ = Tr s(r)s(0)e −βH Tr e−βH (2.31) である。rが大きいと、臨界点以外ではG(r)は指数関数的に減衰し、 G(r)∼ e−r/ξ となる。こうして相関長ξが定義される。 H = −1 2 ∑ r,r′ J (r, r′)s(r)s(r′) を代入して、 G(r) = Tr s(r)s(0)e β 2 ∑ r,r′J (r,r′)s(r)s(r′) Tr e β 2 ∑ r,r′J (r,r′)s(r)s(r′) (2.32) となる。ここで 1 = δs(0),1+ δs(0),−1 を代入して、 G(r) = Tr s(r)s(0)[δs(0),1+ δs(0),−1]e β 2 ∑ r,r′J (r,r′)s(r)s(r′) Tr δs(0),1e β 2 ∑ r,r′J (r,r′)s(r)s(r′)+ Tr δ s(0),−1e β 2 ∑ r,r′J (r,r′)s(r)s(r′) をえる。Tr′をs(0) = 1とした和とおくと結局G(r)は G(r) = Tr ′s(r)eβ2 ∑ r,r′J (r,r′)s(r)s(r′) Tr′e β 2 ∑ r,r′J (r,r′)s(r)s(r′) (2.33) と書き表せるので、G(r)はまさしく“s(0) = 1のときのs(r)の期待値” となる。 ここで平均場近似を行う。その際、平均場⟨s(r)⟩は位置の関数となる。 なぜなら、s(0) = 1という条件を課しているからである。よって s(r) = m(r) + s(r)− m(r) として、揺らぎの2乗を無視すると 1 2 ∑ r,r′ J (r− r′)s(r)s(r′) = 1 2 ∑ r,r′ J (r− r′)(m(r) + s(r)− m(r))(m(r′) + s(r′)− m(r′)) ≈ −1 2 ∑ r,r′ J (r− r′)m(r)m(r′) +1 2 ∑ r,r′ J (r− r′)(m(r)s(r′) + m(r′)s(r))これより分配関数は ZMFA = e−β/2 ∑ J (r−r′)m(r)m(r′)∏ r′ [2 cosh β{∑ r” m(r”)J (r′− r”)}] となり、自由エネルギーは FMFA= 1 2 ∑ J (r−r′)m(r)m(r′)−kBT ∑ r′ log[2 cosh β{∑ r” m(r”)J (r′−r”)}] (2.34) となる。そこで、 δFMFA δm(r′) = 0 より、 0 = ∑ r J (r− r′)m(r)− kBT ∑ r βJ (r− r′) tanh{∑ r” βJ (r− r”)m(r”)} = ∑ r J (r− r′)m(r)−∑ r J (r− r′) tanh{∑ r” βJ (r− r”)m(r”)} = ∑ r J (r− r′)m(r)− tanh{∑ r” βJ (r− r”)m(r”)} これがすべてのr′について成り立つためには m(r) = tanh{∑ r′ βJ (r− r′)m(r′)} (2.35) として解けば良い。 Problem 2.3 m(0) = 1という条件で、(2.35)を数値計算で解け。 (2.35)をmが小さいとして展開すると m(r)≈ β∑ r′ J (r− r′)m(r′) + C(r) (2.36) となる。C(r)はrが小さいときにつく補正である。これをフーリエ変換 すると ˜ m(k) = β ˜J (k) ˜m(k) + C′ (2.37) となる。 ˜ J (k) = J (1− R2k2) , R2= ∑ rr2J (r)/2 ∑ rJ (r) である。 こうして、 ˜ m(k) = Const. 1− βJ(1 − R2k2) ≈ Const. R−2 k2+ tR−2 (2.38)
となる。 ξ−2= tR−2 (2.39) とおき、(2.33)からG(r) = m(r)を思い出すと、結局 G(r)≈ Const.R−2 ∫ ddk e ik·r k2+ ξ−2 (2.40) となり、結局 G(r)∼ e −r/ξ r(d−1)/2 (2.41) となる。こうして相関長ξは ξ ∼ t−1/2 とわかり、(2.8)より ν = 1/2 (2.42) となる。また、t = 0では ∫ ddk 1 k2 ∼ r 2−d より、(2.9)から η = 0 (2.43) となる。
2.5
臨界次元
以上が平均場近似での結果である。ところでまわりのスピンを平均す るのが平均場近似なのだから、次元が高くて周りのスピンの数が多くな れば、近似が良くなるはずである。実はある次元以上で臨界指数が次元に 依存しなくなり、平均場近似と等しくなる。これを上部臨界次元(upper critical dimension, dU)と呼ぶ。 上部臨界次元は以下のようにして評価される。(2.26)より、 fMFA≈ Jt2 (2.44) となる。サイトあたりの内部エネルギーは ϵ = E/N =− d dβ log Z = d dβ(βfMFA)∼ Jt (2.45)となる。これとくらべて、平均場近似で無視した項がはるかに大きいと具 合が悪いのである。平均場近似で無視したのは ∑ r′ J (r− r′)δs(r)δs(r′)≈ J∑ r′ G(r− r′)≈ J R2 ∫ ddk 1 k2+ ξ−2 である。積分は ∫ ddk 1 k2 − ξ −2∫ k<1/a ddk 1 k2(k2+ ξ−2) となる。第1項は温度と無関係な項で第2項はξ−2× ξ−(d−4)となるので、 (2.39)から J t∼ JR 2 ξ2 ≫ J R2ξ 2−d (2.46) となる。こうして ξ4−d≪ R4 (2.47) なら平均場近似が正当化されるのである。つまり、d > 4なら臨界点付近 でξが長くなっても平均場近似が良いが、d < 4だと臨界点付近でξが長 くなると平均場近似が成り立たなくなるのである。よって dU= 4 (2.48) である。 upperがあればlowerもある。イジング模型では1次元では相転移は有 限温度では起こらなかった。このように、次元が下がりすぎると相転移は 起こらない。この転移が見られなくなる次元を下部臨界次元(lower critical dimension,dL)とよぶ。 イジングモデルではdL= 1、n≥ 2のベクトルモデルではdL = 2であ る。これは次のように考えればよい。2次元イジングでは、サイズlの磁 気モーメントが反転した区域(magnetic domain)を考えるとその自由エ ネルギーは ∆F = AJ l− BkBT l (2.49) だけふえる。最初の項は磁気モーメントが反転しているために損をしたエ ネルギーで、後の項はエントロピーからきている。よって、Tを変えてい くとあるところでmagnetic domainを作った方が自由エネルギーが得を して磁性が消える。 ベクトル模型だと事情が異なる。この場合、magnetic domainを作るの に必要なエネルギーは ∆E = Ald−2
である。よって、d = 2では温度が有限な限り必ずエントロピーが勝って しまい、domainが形成され磁化が消える。こうして2次元のベクトル模 型では自発磁化が起こらないことが示される。まとめると、 dL = { 1 イジング模型 2 N ベクトル模型 (2.50) となる。 ここで述べた説明は磁性体について行ったものであるが、多くの相転移 は3次元からおこる。また、4次元以上は平均場近似が成立っていて面白 くない。我々はちょうどいい次元にすんでいるといえる。
2.6
2D
イジングモデルの転移点
イジングモデルの分配関数は Z = 1 2V ∑ {σ} exp(β ∑ <ij> σiσj) (2.51) である。1/2V は後で便利なためにつけた。ここで t = tanh β (2.52)を定義すると、この分配関数はexp(βσiσj) = cosh β +σiσjsinh βを使って
Z = cosh2V β∑ {nl} t ∑ nl (2.53) とかける。nlは閉じたリンクの長さを表す。ここでdualな格子を考え、格 子上のスピン{τa}を定義する。リンクの内側をτa= 1,外を-1とすると、 ∑ nl= ∑ <ab> 1 2(1− τaτb) (2.54) となるので、 Z = cosh2V β∑ {τ} t ∑1 2(1−τaτb) (2.55) となる。ここで t = exp(−2 ˜β) (2.56) からβ˜を定義すると、 Z = cosh2V β(e− ˜β)2V ∑ {τ} e ∑˜ βτaτb (2.57) = cosh2V β(2e− ˜β)2V 1 2V ∑ {τ} e ∑˜ βτaτb
となる。 t = 1− tanh ˜β 1 + tanh ˜β = 1− ˜t 1 + ˜t , ˜t = 1− t 1 + t を使うと、
2 cosh2βe−2 ˜β = sinhV 2β = sinh−V 2 ˜β となる。こうして F (β) = ln(sinh 2β) + F ( ˜β) (2.58) となる。転移点ではこれらの関数が異常を示す。この異常が一点だけで起 こるとすると(転移が一度しかないとすると)、 β = ˜β (2.59) となっていなければならない。それゆえ、 t = 1− t 1 + t で βc= 1 2ln( √ 2 + 1) = 0.44069.... , Tc/TcMFA = 0.5673... (2.60) となる。
第
3
章 繰り込み群とスケーリング
以上、相転移の一般的な概念と平均場近似をざっと復習した。次に相転 移のより精密な議論を行うため、繰り込み群を説明する。これは粗視化、 またはスケール変換というプロセスによって物理量がどのように変化す るかを追う理論で、非常に一般的なものである。それゆえ、何か公式があ り、それに当てはめるというものではない。以下に述べる概念を理解し、 それを味わえば良い。3.1
ブロックスピン変換
一番直感的に分かりやすいのはイジングスピン系であろうから、それ を例にとって説明しよう。L× Lの正方格子を、例えば3× 3のブロック に分けるとする。各格子点には±1の大きさのスピンがあるので、このブ ロックのスピンは+9, +7, +5, +3, +1,−1, −3, −5, −7, −9の値をとる。こ こで粗視化を行う。つまり、この3× 3のブロックを一つのスピンとみな すのである。そして · ブロック中のスピンの和が正ならそのサイトを+1のスピンがのってい るとみなし · ブロック中のスピンの和が負ならそのサイトを-1のスピンがのっている とみなす という手続きを行う。(出来上がった格子点の数はもとのよりも3× 3だ け少なくなる。) さて、出来上がった格子ともとの格子の3× 3の部分を比べてみると次 のことに気がつく。 · T < Tcでは、この操作を繰り返す毎に同じ向きのスピンがどんどんそ ろっていく · T > Tcでは、この操作を繰り返すとスピンがどんどんでたらめになっ ていく · T = Tcでは、この操作を繰り返してもスピンの構造は変わらないこのように、目で見るだけで相転移の様子が分かるのである。 これを数学的に表したのが繰り込み群である。分配関数は Z = Tr{s}e−βH({s}) である。βHをこの際、Hと書いてしまう。ここで T (s′; s1, s2,· · · , s9) = { 1 if s′×∑isi> 0 0 otherwise (3.1) を定義し、 e−H′({s′})= Trs ∏ blocks T (s′; si)e−H({s}) (3.2) とおく。これは Tr{s′}e−H′({s′})= Tr{s}e−H({s}) (3.3) を満たす。 H′({s′}) = J′ ∑ <i,j> s′is′j +· · · (3.4) である。このようにJはJ′へと変換される。もし、次最近接項や次々最 近接項まで考えると、結局変換によってこうしたハミルトニアンに出てく るパラメータ{K}が {K′} = R{K} (3.5) と変換することが予想できる。これが繰り込み群変換である。
3.1.1
例:1 次元イジングスピン系
ここで1次元イジングスピン系のハミルトニアンに対して繰り込み変換 を出してみて、感覚をつかんでおこう。温度βを含んだハミルトニアンを H = −K∑ i sisi+1 (3.6) とする。βJ = Kである。スピン、s1, s2, s3, s4, s5, s6を考え、真ん中のス ピンs2, s5の間のs3, s4について和をとってしまおう。分配関数を計算す るさいには eKs′1s3eKs3s4eKs4s′2 という項がでる。 eKsisj = cosh K× (1 + xs isj) , x = tanh K (3.7)より、この式は (cosh K)3(1 + xs′1s3)(1 + xs3s4)(1 + xs4s′2) となる。ここで∑s3=±1,∑s4=±1をとることを考えると、s3, s4の奇数次 項は0となるので、 ∑ s3,s4=±1 eKs′1s3eKs3s4eKs4s′2 = (cosh K)3 ∑ s3,s4=±1 (1 + x3s′1s′2) = 4(cosh K)3(1 + x3s′1s′2) = 4(cosh K)3eK′s′1s′2/ cosh K′ tanh K′ = (tanh K)3 (3.8) をえる。こうして、 Z = Tr{s′}e−H′({s′}) , H′({s′}) = −K′∑ i s′is′i+1+ N g(K) (3.9) をえる。g(K)は e−Ng(K)= ( 4 cosh3K cosh K′ )N/3 = exp[N 3 log 4 cosh3K cosh K′ ] (3.10) となるように選べば良いので、 g(K) =−1 3log 4 cosh3K cosh K′ (3.11) 結局、繰り込み変換すると最隣接格子上のスピンの結合の強さを示すK は、(3.8)から K′ = tanh−1(tanh3K) (3.12) という繰り込み群方程式に従うことになる。 この性質をもう少し詳しく見てみよう。(3.8)で、x = tanh Kとすると x′ = x3, 0 < x < 1 となる。つまりx < 1の初期値からはじめると、繰り込み変換していくと 終いにx→ +0になってしまうのである。K = βJからx = +0が高温極 限であることを思い出すと、結局繰り込み変換していくとどんどん温度が 上がっていくように見えるということである。つまり、x < 1(つまり有限 温度ではということ)は常磁性ということになる。 またx = 1(絶対零度)では繰り込み群変換してもx = 1のままである が、xが1から少しでもずれると0に向かって減ってしまう。このように
変換しても値が変わらない点を固定点(fixed point)という。x = 0は安定 固定点、x = 1は不安定固定点である。 次に相関長ξを求めてみよう。 ξ(x′) = b−1ξ(x) (3.13) である。今、x′ = xb , b = 3である。この解は ξ(x) = Const. log x = Const. log tanh K (3.14) となる。 1次元イジングの場合、 Z = (2 cosh K)N (3.15) となり、 ⟨sLs0⟩ = 1 Z ∑ s sLs0eK ∑ isisi+1 (3.16) で、σi = sisi+1とおいてしまうと ⟨sLs0⟩ = 1 Z ∑ σ σ0σ1· · · σL−1eK ∑
iσi = (tanh K)L= eL log tanh K= e−L/ξ
(3.17) から、 ξ =− 1 log tanh K となり、確かに一致する。 Problem 3.1 スピンを一個置きに消すことにより、磁場中のイジングモ デルの繰り込み群変換をだせ。つまり、 H = −K∑ i sisi+1− H ∑ i si の{K, H}に対する方程式を導け。 Problem 3.2 ポッツ(Potts)モデル(q=3) H = −K∑ i δsi,si+1 を繰り込み群で解析せよ。
3.2
繰り込み群の一般論
ハミルトニアンにおける長さのスケールをb倍して新しいハミルトニア ンをつくるとする。その際、どちらで計算しても分配関数は変わらないと する。変換後のハミルトニアンと変換前のハミルトニアンに出てくるパラ メータは(3.5)によって {K′} = R({K}) となる。この変換が繰り込み群変換で、その固定点K∗は {K∗} = R({K∗}) (3.18) を満たす。このとき、変換をK∗のまわりでテイラー展開したとすると Ka′ − Ka∗ ≈∑ b Tab(Kb− Kb∗) , Tab = dKa′ dKb K∗ (3.19) となる。そこでTabの固有値と固有ベクトルを ∑ a ϕiaTab= λiϕib (3.20) とすると、 uidef= ∑ a ϕia(Ka− Ka∗) (3.21) は、 u′i = ∑ a ϕia(Ka′ − Ka∗) = ∑ ab ϕiaTab(Kb− Kb∗) = ∑ b λiϕib(Kb− Kb∗) となるので、 u′i = λiui= byiui (3.22) がえられる1。uiをスケーリング変数(scaling variable)、yiを繰り込み群固有値(renormalization group eigenvalue)となづける。yiが正か、負
か、0によって繰り込み変換した場合のパラメータKの振る舞いが異な る。yi> 0の場合、繰り込み変換するとどんどん固定点から離れる。この
場合、スケーリング変数uiはrelevantだという。逆にyi < 0の場合、繰
1
り込み変換するとどんどん固定点に近づく。この場合、スケーリング変数 uiはirrelevantだという。yi = 0はmarginalと呼ばれる。 N個のパラメータがあり、そのうちn個がrelevantだとN − n次元の irrelevantなパラメータの作る面上ではK∗に吸い込まれる。これがcritical surfaceである。図にN = 2, n = 1を模式的に表す。
J
1J
2J
*J
c 図3.1: 繰り込み群変換をしたときの流れ図3.3
スケーリングと臨界指数
いよいよ現代物理学の金字塔、スケーリングと臨界指数を説明しよう。 1次元の例で学んだのは H → H′+ N g({K}) であった。この変換により分配関数は不変で Z = Tr e−H= Tr e−H′−Ng({K}) (3.23) となる。これより自由エネルギーは N f ({K}) = N′f ({K′}) + Ng({K}) (3.24) となる。N′/N = b−dを用いてサイトあたりの自由エネルギーは f ({K}) = b−df ({K′}) + g({K}) (3.25) となる。gは解析的な関数なので相転移付近でも連続的に振る舞う。よっ て相転移で特異な振る舞いをする部分、fsは fs({K}) = b−dfs({K′}) (3.26)となる。 このパラメータ{K}をスケーリング変数にとる。例えば磁性体の相転 移ではut, uhとする。この場合、(3.26)は簡単になり fs(ut, uh) = b−dfs(bytut, byhuh) (3.27) となる。つぎつぎとブロックを大きくしていくと、n回目の変換でこの 式は fs(ut, uh) = b−ndfs(bnytut, bnyhuh) となる。ここで、 ut0 =|b nytu t| (3.28) とおいて、bを消してやると結局、 fs(ut, uh) =|ut/ut0| d/ytf s(±ut0, uh|ut/ut0|−y h/yt) (3.29) をえる。スケーリング変数は転移点近傍で ut∼ t = T − Tc Tc , uh∼ h (3.30) なので、結局 fs(t, h) =|t/t0|d/ytΨ ( h/h0 |t/t0|yh/yt ) (3.31) となる。 (3.31)から臨界指数の関係式が導かれる。 1. ∂2f /∂t2 ∼ Cvより、 α = 2− d/yt (3.32) 2. ∂f /∂h∼ β ∼ (−t)(d−yh)/yt より、 β = (d− yh)/yt (3.33) 3. ∂2f /∂h2≈ χ ∼ |t|(d−2yh)/ytより、 γ = 2yh− d yt (3.34) 4. M ∼ |t/t0|(d−yh)/ytΦ′((h/h0)/|t/t0|yh/yt)で、t → 0としてM ∼ (h/h0)(d−yh)/yhとなるので、 δ = yh d− yh (3.35) これより、関係式 α + 2β + γ = 2 , α + β(1 + δ) = 2 (3.36) が導かれる。これはスケーリング関係式と名づけられている。
3.3.1
相関関数のスケーリング関係式
こんどは相関関数のスケーリング関係式を導こう。 G(r1− r2,H) = ⟨s1s2⟩H− ⟨s1⟩H⟨s2⟩H = ∂ 2log Z(h) ∂h(r1)∂h(r2) H(h) = H −∑ r h(r)s(r) (3.37) さて、繰り込み変換をすると H′(h) = H′−∑ r′ h′(r′)s′(r′) , h′(r′) = byhh(r) (3.38) となり、分配関数は不変で Z′(h′) = Z(h) となっているので、 ∂2log Z′(h′) ∂h′(r1′)∂h′(r2′) = ∂ 2log Z(h) ∂h′(r1′)∂h′(r2′) (3.39) である。左辺は G(r12/b,H′) 右辺は b−2yh⟨(sr1 1 +· · · + s r1 bd)(s r2 1 +· · · + s r2 bd)⟩ なので、よって G(r12/b,H′) = b2(d−yh)G(r12,H) (3.40) となる。h = 0とおくとこれは G(r, t) = b−2(d−yh)G(r/b, bytt) (3.41) となる。繰り込みをn繰り返すと G(r, t) = b−2n(d−yh)G(r 12/bn, bnytt) となり、bnytt = t 0となるまで繰り返すと G(r, t) = t t0となる。相関関数は一般にG∼ e−r/ξ= f (r/ξ) となるので、 ξ ∼ t−1/yt , ν = 1 yt (3.43) となる。 またt = 0、つまり転移点で見ると(3.41)を G(r, t) = b−2(d−yh)G(r/b) = b−2n(d−yh)G(r/bn) となる。bn= r/r0となるまで繰り込みを繰り返すと G(r, t) = ( r r0 )−2(d−yh) (3.44) となる。よって、 d− 2 + η = 2d − 2yh (3.45) が得られる。ν = 1/yt,η = d + 2− 2yhを使うとスケーリング関係式 (3.32),(3.34)は α = 2− dν , γ = ν(2 − η) (3.46) となる。この関係式はハイパースケーリング関係式(hyperscaling relation) と呼ばれている。 Problem 3.3 平均場近似での臨界指数を、スケーリング関係式とハイ パースケーリング関係式に代入してみよ。
3.4
有限サイズスケーリング
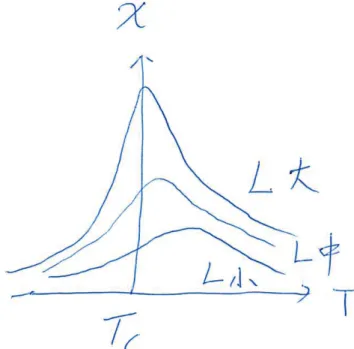
次に有限サイズの系の場合のスケーリング関係式を議論しよう。系が有 限でLd= V という体積を持っているとする。格子定数aの“立方格子” を考えると一辺のサイト数はL/aとなる。大きさLをとめてa→ baと 繰り込み変換する。このとき、一辺のサイト数は L/a = ˜L = bL/(ba) = b ˜L′ より ˜ L′= b−1L˜ と変換するので、(3.26)は fs({K}, ˜L−1) = b−dfs({K′}, b˜L−1) (3.47)これが有限サイズスケーリング(finite size scaling)である。これを磁性体 に適用し、前と同じように繰り込み操作を繰り返すと fs(t, h) = tt 0 dνΨ ( h/h0 |t/t0|yhν , ( t t0 )−ν ˜ L−1 ) (3.48) となる。 ( t t0 )−ν ∼ ξ に注意すると、結局 fs(t, h) = tt 0 dνΨ ( h/h0 |t/t0|yhν , ξ/ ˜L ) (3.49) となる。 これから物理量を計算してみよう。例えば帯磁率χは χ = ∂ 2f ∂h2 ∼ |t/t0| (d−2yh)νψ(t−νL˜−1)∼ |t|−γψ(t−νL˜−1) (3.50) で、これから χ∼ ˜Lγ/νψ(t ˜˜ L1/ν) (3.51) となる。例えばサイズごとにコンピュータシミュレーションを行い、プ ロットすると、上式から図のようになることが期待される。 このように有限サイズスケーリングは有限系の情報を積極的に活用する という節約型の方法であり、特に計算機上で相転移を調べるのに有効な方 法である。 Problem 3.4 1次元イジング模型をサイズLで厳密に解き、 χ∼ ξγ/νf (ξ/L) となっていることを示せ。 Problem 3.5 スピン相関関数Gをだすとき、yhだけが現われ、ytは使 わなかった。もったいない。なんとかこちらも使えないものか、考えよ。 Answer: 転移点での相関関数としてsisj = E(r)に対する相関関数を考 えると、この局所内部エネルギーの相関関数は ⟨E(r1)E(r2)⟩ ∼ |r12|−2d+2/ν (3.52) となることが導かれる。
図3.2: 有限サイズスケーリングの模式図
3.5
他の問題への応用
繰り込み群の章を終えるに当たって,他の問題への意外な応用を示して おく(田崎晴明,パリティ11(1996) 11)。 半径Rの球から質点を速さu0で水平方向に投げて最大の距離Rmaxま で離れたとする。このとき, E0 = u20 2 − 1 R = u2max 2 − 1 Rmax (3.53) で,角運動量の保存則からRu0= Rmaxumaxなので, E0= R2u20 2Rmax − 1 Rmax (3.54) となる。これから2E0R2max+ 2Rmax− R2u20= 0 , Rmax=
1 + √ 1 + 2u20R2E −E0 (3.55) となる。 E0 = u20 2 − 1 R = 1 2(u0− √ 2 R)(u0+ √ 2 R) (3.56)
なので, Rmax∝ ( √ 2 R − u0) −1 (3.57) となり,“臨界指数”は−1となる。 これを繰り込み群から考える。この授業のはじめに述べたように重力下 での運動は r′ = αr , t′ = α3/2t (3.58) のもとで不変である。このとき,水平方向と鉛直方向の速さは,α = e−τ とすると, (u′, v′) = (α−1/2u, α−1/2v) = (eτ /2u, eτ /2v) (3.59) となる。半径e−τRからRまでいく時間は∆t≈ τ Rv なので ˆ v = v′− 1 R2∆t = (1 + τ /2)v− τ/Rv (3.60) ˆ u = (1 + τ /2)u (3.61) さらに角度は∆θ = u′∆t/Rτ u/vだけ変わっているので ( cos ∆θ − sin ∆θ sin ∆θ cos ∆θ ) ( ˆ u ˆ v ) = ( (1− τ/2)u (1 + τ /2)v + τ u2/v− τ/Rv ) (3.62) となる。よって, R ( u v ) = ( u v ) + ( −u/2 v/2− 1/Rv + u2/v ) τ (3.63) となり,τ → 0で ( du/dτ dv/dτ ) = ( −u/2 v/2− 1/Rv + u2/v ) (3.64) となる。固定点は(u∗, v∗) = (0,√2/R)である。固定点のまわりで展開す ると w = v− v∗ , dw/dτ ≈ w (3.65) となる。固定点のまわりでは結局 u = ue−τ/2 , w = weτ (3.66) となる。
スケーリング領域にいる時間はu(τ ) = ϵe−(τ−τ0)/2, w = δweτ−τ0 で,
入るまでの時間,スケーリング領域に滞在する時間,スケーリング領域か ら出てきたあとの時間である。このτ2が発散するのである。この発散は eτ2R∝ 1 ∆w ∝ 1 u− uc (3.67) なので臨界指数-1が求められた。 以上の二つのアプローチの違いは 1. 角運動量保存則を使っていない 2. ucを求める必要がない という点である。
第
4
章 統計力学と量子力学
前章まで、相転移の概念を学んできたが、実際にスケーリング変数が relevantかirrelevantかとか、臨界指数の値を計算するにはやはり分配関 数を真面目に計算する必要がある。 そこで分配関数を計算する新しい手法について述べる。4.1
経路積分
1次元のシュレーディンガー方程式 i¯h∂ϕ ∂t =− ¯ h2 2m ∂2ϕ ∂x2 + V (x)ϕ = Hϕ (4.1) を考える。これより状態|ϕ⟩の時間発展は |ϕ(t′)⟩ = e−iH(t′−t)/¯h |ϕ(t)⟩ = U(t′, t)|ϕ(t)⟩ (4.2) とかける。座標表示してやれば ϕ(x′, t′) = U (x′, t′; x, t)ϕ(x, t) (4.3) である。ここで時刻tからt′を小さな時間に等分割して U (t′, t) = U (t′, tN−1)U (tN−1, tN−2)· · · U(t2, t1)U (t1, t) (4.4) となり、座標表示してやると U (x′, t′; x, t) = ∫ dxN−1· · · dx1U (x′, t′; xN−1, tN−1)U (xN−1, tN−1; xN−2, tN−2)· · · U(x1, t1; x, t) (4.5) となる。ここで時間間隔は(t′− t)/N = ∆tである。Nが十分大きければ ⟨xk+1|e−iH∆t/¯h|xk⟩ = ⟨xk+1|1 − i∆tH ¯ h |xk⟩ (4.6) となる。ここで完全系∫ 2π¯dph|p⟩⟨p| = 1を使うと、 ⟨xk+1|H|xk⟩ = ∫ dp 2π¯h⟨xk+1|pk⟩⟨pk|H|xk⟩ (4.7)となる。 ⟨pk|H|xk⟩ = H(pk, xk)⟨pk|xk⟩ (4.8) として、 U (xk+1, tk+1; xk, tk) ≈ ∫ dp k 2π¯h⟨xk+1|pk⟩⟨pk|xk⟩ ( 1− i ¯ h∆tH(pk, xk) ) (4.9) ≈ ∫ dpk 2π¯hexp [ ipk ¯ h (xk+1− xk)− i ¯ h∆tH(pk, xk) ] をうる。こうして U (x′, t′; x, t) = ∫ dp N−1 2π¯h · · · ∫ dp 0 2π¯h ∫ dxN−1· · · ∫ dx1 (4.10) exp [ i ¯ h N∑−1 k=0 {pk(xk+1− xk)− ∆tH(pk, xk)} ] となる。xk+1− xk= ˙x(t)∆tとして U (x′, t′; x, t) = ∫ dp N−1 2π¯h · · · ∫ dp 0 2π¯h ∫ dxN−1· · · ∫ dx1 (4.11) exp [ i ¯ h ∫ t′ 0 dt′′{p(t′′) ˙x(t′′)− H(p, x)} ] (4.12) となる。作用積分S = p ˙x− H(p, x)をつかうと、結局 U (x′, t′; x, t) = ∫ DpDx exp [ i ¯ hS ] (4.13) が得られる。これがファインマン(Feynmann)の経路積分である。注意点 はp̸= m ˙xということである。この物理的意味は、量子力学の時間発展と いうのは、古典的には許されないようなすべての経路を考えて、その作用 を計算すればよいということである。古典的な軌道は解析力学で習ったよ うにこの作用積分が最小になるものである。経路がこの軌道から少しでも ずれると古典系ではそのずれが¯hよりもはるかに大きくなり、位相がラン ダムになり打ち消しあってしまう。このため、古典軌道のみが観測される のである。 ハミルトニアンがH(p, x) = p2/2m + V (x)の場合、 ∫ t′ t [p(t′′) ˙x(t′′)− p 2 2m]dt ′′ =∫ t′ t dt′′ [ − 1 2m(p(t ′′)− m ˙x(t′′))2+m ˙x(t′′)2 2 ] (4.14) としてpについてガウス積分してしまうと、 U (x′, t′; x, t) = ∫ Dx exp [ i ¯ h ∫ t′ t dt′′ { m ˙x(t′′)2 2 − V (x) }] (4.15)
となる。 変分原理を思い出すと、 δS(p, x) = 0 → x =˙ p m , p =˙ − ∂V ∂x (4.16) δS(x) = 0 → m¨x =−∂V ∂x (4.17) となる。経路積分はもう演算子を含まず、c数だけで書けていることに注 意しよう。