287 公益社団法人
日本設計工学会
JOURNAL OF JAPAN SOCIETY FOR DESIGN ENGINEERING設計工学
ONLINE ISSN: 2188-9023 PRINT ISSN: 0919-2948 Volume 56, Number 6, Page 287-302
Category: Paper
Received date: 07 September 2020 Accepted date: 16 December 2020
J-STAGE Advance publication date: 11 February 2021 Publication date: 5 June 2021
Corresponding author: Mineo HIGUCHI (E-mail address: [email protected]) DOI: 10.14953/jjsde.2020.2904
Copyright©2021 Japan Society for Design Engineering
線形和機構を用いた昇降台車の開発
(機能検証機の設計と試作)
Development of an Adjustable Lift Cart using Linear Equation Mechanism
(Design and Prototyping of an Experimental Model)
樋口 峰夫* 1,横手 大輔* 2,河田 淳治* 3,松本 功* 4,森本 滋郎* 5,藤澤 正一郎* 6 (Mineo HIGUCHI) (Daisuke YOKOTE) (Junji KAWATA)
(Isao MATSUMOTO) (Jiro MORIMOTO) (Shoichiro FUJISAWA)
Abstract
Lift carts of the type in which the loading platform is lifted up and down by human power are widely used. In the operation of such conventional lift carts, the cart's horizontal movement and the load's vertical movement on the cart's loading platform must be operated separately. This paper presents a novel adjustable lift cart with a function that lifts the loading platform up or down to a desired height while it is moved horizontally by human power. The loading platform of the adjustable lift cart moves forward and upward (or downward) as if it is on a virtual ramp. The adjustable lift cart's structure joins the left and right wheels of the cart to a differential gear whose output is coupled with a Continuously Variable Transmission (CVT) that raises the loading platform up and down. We call this mechanism, which consists of a CVT and a differential gear, “a linear equation mechanism”. In this paper we first propose the concept of a novel adjustable lift cart and explain how our linear equation mechanism can be applied to it. Second, we illustrate a mechanism of the CVT that consists of a roller and wheels and derive the CVT's ratio. Finally, we explain the design of an experimental model of the adjustable lift cart and show experiment results.
Key words
mechanism, lift cart, scissor linkage, continuously variable transmission, differential mechanism, passive robotics, linear equation mechanism
288 1 緒言 人力で荷物を搬送する手押し台車は産業分野などで広く使われている.荷物の上昇・下降作業も行える手 押し式の昇降台車も製品化されている.そのような一般的な昇降台車では,荷台の高さを油圧ジャッキによ り上下動させて目標高さに合わせ,維持することができる.油圧ジャッキは足踏みペダルや手動のレバーで 操作する.このような昇降台車を使用した荷物の搬送作業は以下のようなステップからなる. 1) 台車を押して走行させて,荷物を取り上げる場所まで行く. 2) ジャッキを操作して,荷台の高さを荷物を取り上げる場所の高さに合わせる. 3) 荷物を取り上げる場所から,台車の荷台に荷物を移動する. 4) 台車を押して走行させて,荷物を降ろす場所まで行く. 5) ジャッキを操作して,荷台の高さを荷物を降ろす場所の高さに合わせる. 6) 台車の荷台から,荷物を降ろす場所に荷物を移動する. このように手押し式の昇降台車を使った搬送作業では,荷台の高さを目標高さに合わせる垂直動作と,台車 による走行とを別々に行わなければならない. 台車の走行中に同時に荷台の上昇・下降動作を行うことができれば作業時間が短縮できる.このような要 求に対して従来,走行している台車の車輪の回転と荷台の昇降動作を機械的に結合する機構が考えられてい る.例えば高尾らの公開特許3)は,荷台を昇降させるネジ軸の回転を車輪の車軸に取り付けた切り替えギヤ の手動操作により正転・逆転・停止させる.また谷口らの公開特許4)は,荷台を昇降させるラックに対して, 車輪の回転により駆動されるピニオンの噛み合いを手動操作する.これらの機構では,台車の走行距離に対 する荷台の昇降高さの変化量は歯車やネジ軸の速比で一意に決まってしまう.このため荷台を昇降させる高 さを目標高さに合わせる場合,あらかじめ目標高さに合わせてストッパを設定するといった作業が必要にな る.一方,入江ら5), 6)は階段昇降可能なロボット台車において荷台の水平を維持するため,荷台を支持する 2 組のリンクをモータで駆動する機構を開発している.この機構では荷台を昇降させるための大きなパワー のモータとその電源が必要になる. 我々は任意の距離の走行に対して,任意の高さの荷台の昇降が同時に行える図1 に示すような新規の手押 し台車を開発している1), 2).この台車では荷台の昇降は油圧やモータによらず,台車の車輪の回転を動力に
Fig. 1 Conceptual image of an adjustable lift cart
virtual ramp
truck
load
日本設計工学会四国支部平成26 年度研究発表講演会(2015年3月15日)にて発表 *1 正会員,徳島文理大学 理工学部 機械創造工学科(〒769−2193 さぬき市志度1314−1), [email protected] *2 非会員,横手ゴム商会 *3 非会員,徳島文理大学 理工学部 電子情報工学科(〒769−2193 さぬき市志度1314−1) *4 非会員,徳島文理大学 理工学部 機械創造工学科(同上) *5 非会員,徳島文理大学 理工学部 電子情報工学科(同上) *6 正会員,徳島文理大学 理工学部 電子情報工学科(同上)289 用いる.この台車を使用した荷物の搬送作業では,上記の一般的な昇降台車の2)と 5)のステップが不要で, 1)と 4)のステップにおいて同時に昇降動作が行われる.このとき台車の荷台は,図 1 に示すように荷物が仮 想的な斜面に沿って移動するかのように動く.斜面の勾配は荷物が重いときはゆるくするなど調整可能であ る.このような台車を適用する作業として,例えばトラックからの荷物の積み下ろし・積み上げ作業や,配 送センターでの摘み取り(ピッキング)作業を想定している.
Goswami らは Passive Robotics7)という概念を提案している.これは変速機やブレーキ等の受動的な機械
要素を搭載しその特性を計算機制御するロボットの技術である.代表的な適用例としてPeshkinらの Cobot8)
がある.Passive Robotics を適用したロボットでは,関節の駆動に機械の安全上,危険源となるモータを使 わない.このため人間の力学的な作業支援に適用した際に低リスクであるという点で優れている.
Passive Robotics を適用した装置として,Akella9)らはdoor unloader と呼ぶ手押し台車を開発している.
この装置は自動車の組み立て作業用に開発され,操舵輪によって決まる台車が進行する方向は計算機制御さ れ,台車の駆動と速度の調整は人間が行う.このような分業により,作業に適した仮想的なレールが床に敷 いてあるかのように,台車に搭載した大きな荷物を周囲に衝突させることなく,人間が作業しやすい速度で 動かすことができる.また平田ら10)はRT Walker と呼ぶ手押し台車を開発している.この装置は高齢者等 の歩行の支援用に開発され,操舵輪の方向を制御する代わりに左右の車輪の制動力を制御することで進行方 向を変化させる.これらの装置には昇降機構は設けられていない.
一方,樋口らは PAS-Arm11), 12)と呼ぶ装置を提案している.PAS-Arm は Passive Assist Arm の略で,
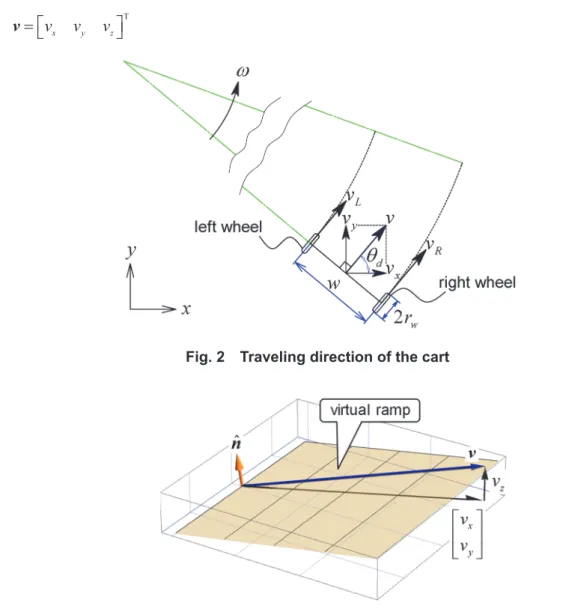
Passive Robotics の範疇に属し,人間の作業支援等を目的に開発された.PAS-Arm では受動的な機械要素 として CVT (Continuously Variable Transmission)と差動歯車を組み合わせた「線形和機構」(Linear Equation Mechanism)13)と呼ぶ機構を3 関節のロボットアームに組み込んでいる. 本報で提案する昇降台車では,任意の距離だけ任意の方向に走行させたとき,同時に荷台を任意の高さだ け昇降する機能を実現するためにこの線形和機構を採用する.これまでに文献1)ではこの台車のコンセプト を提案して動作原理を簡単に述べた.また文献2)では,台車が短い距離だけ直進するときに荷台を昇降させ る場合について搭載するCVT の変速比の式を導出した. 本報では,まず台車の走行に応じて荷台を昇降させる場合,台車の車輪の回転軸と昇降機構の間に線形和 機構を適用できることを示す.次に線形和機構を適用した昇降台車において,PAS-Arm では 3 個使用して いたCVT を 1 個に削減できることを示し,そのときの CVT の変速比の式を導く.更にローラとホイールを 組み合わせたCVT の機構について検討し,台車に搭載された X 型のリンクを組み合わせた機構について説 明する.台車が平面を任意の方向に直進または曲折して走行するときのCVT の変速比と CVT のホイールの 舵角の式を導く.最後に機能検証機の試作と実験結果について述べる. 2 原理と構成 台車を平面上で任意の方向に直進または曲折して走行させるとき,荷台を仮想的な斜面に乗ったかのよう に昇降させるための,台車と荷台の速度の関係について説明する.次に線形和機構について述べ,昇降台車 への適用方法とCVT 個数の削減方法について説明する. 2.1 台車の平面運動モデルと仮想的な斜面 台車は水平面(
xy
平面)を走行しているとする.図2 に台車の進行方向と速度の関係を示す.左右車輪の 接地点の速度vL,vRは,左右車輪の角速度を
L,
R,台車の車輪の半径をrwとすればそれぞれvLrw
L, R w R v r
となる.これらを用いて台車の速度v
と台車が旋回しながら走行しているときの旋回速度
は,台 車の左右車輪間の距離(輪距)をwとすれば次式のように表される.290
L R
2
w
L R
2
v v v
r
(1)
v v w r
R L
w
R L
w
(2) 台車の速度を絶対座標で見たときのx
方向,y方向の速度は図2 を参照してそれぞれ次式のようになる. cos x d v v
(3a) sin y d v v
(3b) ここで d
はx
方向に対する台車の進行方向の角度である. ここで図1 に示すように台車の荷台が仮想的な斜面に沿って昇降していると考える.斜面の傾斜は一定と する.図3 に台車の走行速度と荷台の昇降速度の関係を示す.図中,仮想的な斜面(virtual ramp)上の平行 線は等高線である.台車が速度ベクトル
v v
x y
Tで走行している時の荷台の昇降速度をvzとする.このと き荷台の速度ベクトルv
は次のように書ける.添え字のTは転置を表す. T x y zv v v
v
(4)Fig. 2 Traveling direction of the cart
291 また,仮想的な斜面に立てた法線方向の単位ベクトルを
ˆn
とする. Tˆ
n n n
x y z
n
(5) 荷台の速度ベクトルv
は斜面に平行で斜面の法線ベクトルˆn
と直交するので,次式が成り立つ. ˆ 0 n v (6) 式(6)は,式(1),(3)-(5)を用いて次のように書くことができる. 1 z 2 L 3 R 0 k v k
k
(7) ここで 1 z k n (8a)
2 3 w xcos
d ysin
d2
k k r n
n
(8b) とおいた.式(7)は荷台の昇降速度 z v 並びに左右の車輪の角速度 L
, R
の線形和のかたちになっている. 2.2 線形和機構線形和機構について説明するため,PAS-Arm の原理11), 12)について簡単に説明する.PAS-Arm は図 4(a) に示すような3 関節のロボットアームである.図4(b)で J1,J2,J3 と記した軸はロボットアームの関節軸 に結合される.これらの軸はCVT を介して差動歯車(differential gear)で結合されている.このとき各関節 軸の角速度を
1,
2,
3とすれば,これらの間には次式の関係が成り立つ.(a) PAS-Arm (b) linear equation mechanism Fig. 4 Conceptual model of the PAS-Arm and linear equation mechanism
292 1 1 2 2 3 3 0 c c c k
k
k
(9) ここでkc1,kc2,kc3は各CVT の変速比である.式(9)は角速度の線形和を計算しているので,図 4(b)のよう にCVT と差動歯車を組み合わせた機構を「線形和機構」と呼ぶ.3 個の角速度
1,
2,
3の間に式(9)で表 される1 個の拘束条件を与えているので,3 1 2 自由度についてはPAS-Arm は人間が与える外力によっ て動作可能になる. 本報で提案する昇降台車の機構の基本的な構成を図5 に示す.
Lと
Rの軸には台車の車輪(wheel)を結合 する.また
1の軸は昇降機構の入力であって,この機構はねじ軸などにより荷台を速度v
zで昇降駆動できる 構造とする.
1をv
zに変換する係数をk
vとおく. 1 z v v k
(10) 本報で提案する昇降台車では式(7),(10)が PAS-Arm の式(9)に相当するので,PAS-Arm と同様に線形和機 構を適用できる.この構成により台車を押したとき車輪の回転により荷台を昇降させることができる. 2.3 CVT 個数の削減と変速比 線形和機構では3 軸の変速比を調整するため,基本的には図 4(b)や図 5 に示すように 3 個の CVT が必要 である.CVT の個数が多いと部品点数が増えるのでコスト増につながる.そこで次に図 5 の構成から CVT の個数を減らすことを考える.まず,式(8b)においてk2とk3は等しいが,左右の車輪は異なる軸なので同じ CVT で兼用することはできない.図 6 は図 5 の構成から CVT を 2 個除いた状態を示す.図 6(a)は図 5 の構 成からCVT2(または CVT3)を残して他を取り去った場合,図 6(b)は CVT1 を残して CVT2 と CVT3 を 取り去った場合である.図6(a)の構成では角速度の関係は次のいずれかとなる. 1 kL L R 0
(11a) 1 L kR R 0
(11b) 一方,図6(b)の構成では角速度の関係は次のようになる.293 1 1 0 c L R k
(12) 式(11),(12)で,変速比は式(8)で定めたものとは異なるので異なる添え字としている. 図6(a)の構成では,式(11a)より 0 L
(または式(11b)より 0 R
)のときに昇降機構の入力速度 1
を任 意に決めることができない.これは左または右の車輪が止まって反対側の車輪だけが動く状態( 0 L
また は 0 R
,信地旋回)で急なカーブを曲がっているときに,荷台が昇降できないことを意味する.一方図6(b) の構成では,式(12)より L R
のとき 1 1 0 c k
となるので, 1
に比例する荷台の昇降速度が0になる.こ れは昇降台車がその場で旋回する(超信地旋回)ときに,荷台が昇降できないことを意味する. トラックの積み下ろしのような作業では,最終的に台車の荷台の前端とトラックの荷台の後端が平行にな るように接近する必要がある.そのような場合,作業者がトラックから少し離れたところから荷台同士が 徐々に平行になるような軌道を取る間に荷台の昇降が完了できればよい.その過程で信地旋回が生じたとき に,右カーブは可能だが逆は不可といったことがあると不便である.一方,超信地旋回するときには,右回 転で上昇かその逆か等を作業者がその都度決めるよりは,荷台の昇降ができない仕様にした方が使いやすい と思われる.以上から,ゆるいカーブの走行から信地旋回まで荷台昇降が可能な図 6(b)の構成を採用する. 図6(b)の構成の変速比を考える.まず 2 0 k として式(7)を 2 k で割れば,式(8b)より 2 3 k k なので 0 z L R kv
(13) となる.ここでkは式(8)を用いて次のようにおいた.
1 2 2 cos z sin w x d y d k n k k r n
n
(14) 次に 2 0 k の場合を考える.式(8b)で 2 3 0 k k となるのは,0
x yn n
の場合とcos
sin
0
x d y dn
n
の 場合である.法線ベクトルˆnは単位ベクトルなので,0
x yn n
のときは 1 z n となり,仮想的な斜面に立て た 法 線 ベ ク ト ル が 鉛 直 と な る . こ の と き 「 斜 面 」 は 水 平 面 と な る の で 荷 台 は 昇 降 し な い . ま た ,cos
sin
0
x d y dn
n
は2 次元のベクトル T x yn n
とcos
d sin
d の内積となっている.この内積がT 0でこれらのベクトルが直交しているとき,台車が走行する方向は仮想的な斜面の最大傾斜方向と直交する 方向になる.言い換えれば台車の走行方向は斜面の等高線に平行な方向となる.このときも荷台は昇降しな(a) configuration(a) (b) configuration(b)
294 い.これらの条件を満たすためには,CVT において式(14)の変速比
k
の絶対値の最大値を無限大に設定でき るようにする必要がある.言い換えれば1k 0に設定できる必要がある. なお昇降台車の運用上,走行せずに荷台だけを昇降できた方が便利な場合もあり得る.このため CVT は 式(14)の変速比k
を0
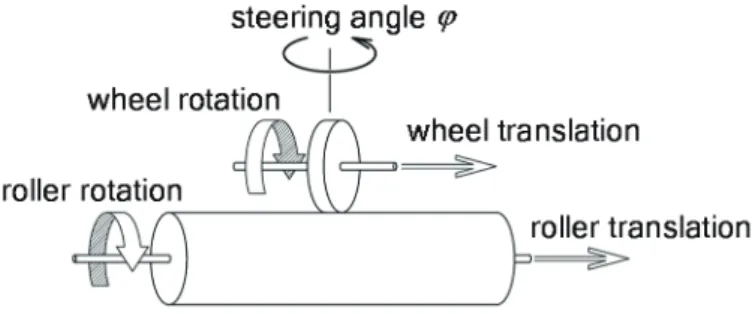
に設定できることが望ましい. 3 CVT と台車 昇降式の台車には荷台をX 型のリンクで昇降する型の市販の台車を流用する.CVT は 2 章で述べた PAS-Arm に採用したローラとホイールを組み合わせた構造を一部改良した構造を考案し,台車と組み合わせた. 以下,これらの機構の設計とCVT の変速比について説明する. 3.1 CVT の構成と動作 CVT は図 7 に示すように CVT ローラ(CVT roller)と CVT ホイール(CVT wheel)から構成される.CVT ロ ーラとCVT ホイールはそれぞれの軸回りに回転自在である.CVT ホイールは CVT ローラに押し付けられ ており,互いに摩擦で回転する.また CVT ホイールは図中の角度
が可変になるよう支持されている.こ の角度
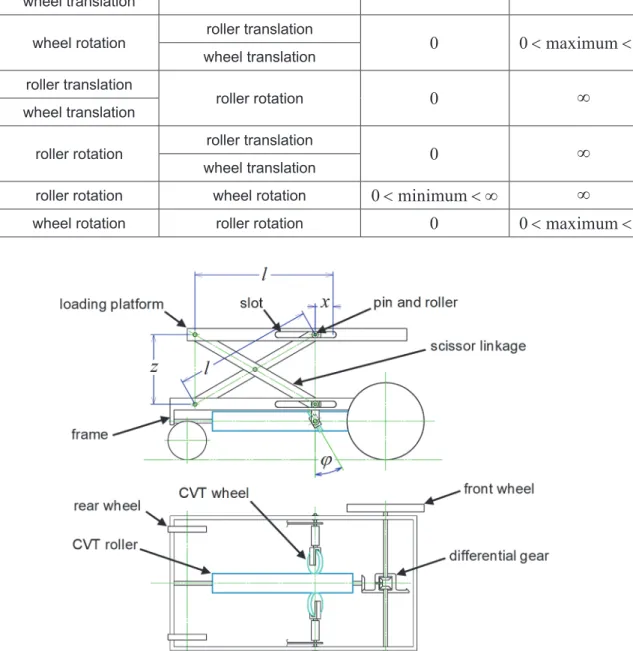
を舵角(steering angle)と呼ぶ.CVT ローラまたは CVT ホイールは,CVT ローラの軸方向に並進 移動可能とする.CVT ローラや CVT ホイールの回転または並進運動が CVT の入出力となる. 線形和機構ではCVT の差動歯車と結合された側の軸を出力,その反対側を入力と定義している.CVT ロ ーラとCVT ホイールの運動と入出力の組み合わせを表 1 に示す.この表は文献12)で検討した組み合わせに CVT ホイールの並進移動を追加して改変したものである.表中,例えば a の行の組み合わせは CVT ホイー ルに対してCVT ローラが並進移動する運動を入力として昇降機構に結合し,CVT ホイールの回転を出力と して差動歯車に結合する構成である.このとき変速比の絶対値の最小値は0 と無限大の間の値,最大値は無 限大になる. 2.3 節での検討より,変速比kの絶対値の範囲として最小値を0,最大値を無限大と設定できることが望ま しい.このような組み合わせとして表1 の e,f,g,h がある.このうち g と h では CVT ローラまたは CVT ホイールの並進運動を差動歯車の回転運動に結合するのに別途機構が必要になるのが難点である.またe は CVT ローラが長手方向に並進移動するために大きな空間を占有するのが難点である.そこで昇降台車に組 み込む線形和機構の CVT として f の組み合わせを採用する.Faulring14)らは同様の構成を触覚提示装置の 駆動に採用している. 表1 の f の構成を CVT として昇降台車に組み込んだ構造を図 8 に示す.この図は昇降台車を側面と底面 から見た図である.昇降台車の左右の車輪(wheel)の間には差動歯車(differential gear)が配置され,台車が 曲折して走行するときの左右の車輪の回転数差を吸収する.台車の左右車輪の同相の回転が差動歯車で取り 出され,CVT ローラ(CVT roller)を回転させる.差動歯車は,図 5 に示す bevel gear A と bevel gear B の歯295 数をそれぞれZA,ZBとしたとき,歯数の比がZ Z A: B 2 :1となる歯車で構成する.このときCVT ローラの 角速度を
rとすれば,これと左右車輪の角速度
L,
Rとの関係は次式のようになる. r L R
(15) CVT ローラには左右から CVT ホイール(CVT wheel)が押し付けられている.CVT ホイールとその舵角を調 整する機構はリニアガイドで支持されて台車の前後方向に並進移動可能である.CVT ホイールが並進移動Table 1 Combinations of input and output motion of CVT
input axis output axis absolute value of gear ratio (to lift mechanism) (to differential mechanism) minimum maximum a roller translation
wheel rotation
0 minimum
b wheel translation c
wheel rotation roller translation
0
0 maximum
d wheel translation e roller translation
roller rotation
0
f wheel translation g
roller rotation roller translation
0
h wheel translation
i roller rotation wheel rotation
0 minimum
j wheel rotation roller rotation
0
0 maximum
296 すると荷台が昇降する. 次にCVT の動作について図9 を用いて説明する.CVT ローラと CVT ホイールの回転軸が平行なとき, 舵角
0
とする.CVT ローラの半径をrr,角速度を
rとすれば,CVT ローラ外周の速度はrr
rとなる. CVT ホイールの並進速度vcは舵角
を用いて次式のようになる. tan c r r v r
(16) CVT ローラの角速度
rに対するCVT ホイールの並進速度vcの関係は,CVT 単体での変速比をkcとすれば c c r v k
と書け,kcは式(16)より tan c r k r
(17) となる.舵角
0のときk c 0である.このときCVT ローラの回転軸と CVT ホイールの回転軸は平行に なるので,CVT ローラが回転すると CVT ホイールは摩擦駆動されて単純に回転し,並進運動は生じない. CVT ホイールをこの姿勢にすることにより式(14)の変速比kを無限大に設定することができる.舵角の範囲 が
2
2のとき,CVT ローラが回転すると CVT ホイールは回転すると同時に CVT ローラの回転 軸と平行に並進移動する.このときCVT ホイールは CVT ローラに対してネジを切るように動き,舵角
は ネジのリード角に相当する.一方舵角を
2とした場合,CVT ホイールが回転したとき CVT ホイー ルはCVT ローラの回転軸と平行に並進移動する状態となる.このときがk c となる. 3.2 昇降機構 荷台の昇降について図8 を用いて説明する.台車の荷台(loading platform)はフレーム(frame)に対して X 型のリンク(scissor linkage)で支持されている.X 型リンクをなす 2 本のリンクは中央でピンにより回転自 在に結合されている.フレームと荷台にはそれぞれ台車の進行方向に平行に溝(slot)が設けてある.X 型リン クをなす1 本のリンクは下端をフレームに対して回転自在に支持され,上端に取り付けられたピンとローラ (pin and roller)は荷台の溝にはまっており,ローラが転がることでリンク上端が溝に沿って並進移動可能で ある.X 型リンクをなすもう 1 本のリンクは上端を荷台に対して回転自在に支持され,下端に取り付けられ たピンとローラはフレームの溝にはまっており,リンク下端は上端と同様に溝に沿って並進移動可能である. この構成により,荷台はフレームに対して平行に昇降する.X 型リンクをなすリンクのうち,下端がフレームの溝に沿って並進移動可能なリンクの下端には CVT ホ イールとその舵角を調整する機構が取り付けられている.舵角
が
2
0
または0
2
のと297 き,CVT ローラが回転すると CVT ホイールは CVT ローラの回転軸と平行な方向,すなわち台車の前後方 向に並進移動するが,このとき同時にリンク下端も移動するので荷台が昇降する. X 型リンクの各部の寸法を図 8 のように定めれば次式が成り立つ.
2 2 2 l l x z (18a) 0 x l (18b) 上式をx
について解き,時間で微分すれば次式が得られる. 2 2dx
z
dz
dt
l z
dt
(19) ここでdx dtは CVT ホイールの並進速度 c v (式(16)),dz dtは荷台の昇降速度 z v (式(4)の要素)に相当す る.これらの間の関係を昇降機構の部分の変速比k
xとすれば,式(19)は次式のように書ける. z x c v k v (20a) 2 2 xl z
k
z
(20b) 3.3 CVT の舵角 CVT の舵角
の大きさと正負を調整することで台車の速度に対する荷台の昇降速度を調整することがで きる.そこで
の式を導く.式(13)に式(20a),(16),(17)を代入すると次式が得られる. 0 c x r L R kk k
(21) 上式に式(15)を代入して整理すれば次式のようになる.
1
kk k
c x
L
R
0
(22) この式が常に成り立つためには前のカッコ内が0でなければならない. 1kk kc x0 (23) 上式に式(17)を代入して tanについて解けば次式が得られる.1
tan
x rkk r
(24) 式(24)に式(14),(20b)を代入すれば CVT の舵角
を定める式が得られる.これに仮想的な斜面の法線ベ クトルˆn
,台車の進行方向の角度 d
,荷台の高さz
を入力すれば,台車を動かしたとき,荷台を仮想的な斜 面に沿って昇降させることができる.298 4 機能検証機の試作と実験 提案する台車の原理と機能を確かめるため,市販の台車を改造して機能検証機を試作し,動作を確認する 実験を行った.機能検証機の構造と実験について述べる. 4.1 機構 機能検証機の改造元となった東正車輌製の昇降台車 GLH-120 の写真を図 10(a)に,試作した機能検証機 の写真を図 10(b)に示す.改造元の台車は,前輪は固定輪で後輪は進行方向を変えられる自在車輪となって いる.足踏みペダルを使って油圧で荷台を昇降させる構造だが,これらの部品は取り外し,荷台とX 型のリ ンク,取っ手の部分等を流用する. 試作した機能検証機のCAD モデルを底面から見上げた図を図11 に示す.差動歯車や CVT の部品には, 産業用途で一般的に流通している部品を採用した.これらを取り付け,収めるために,改造元の台車(original cart)の車輪を外して台車の底部に別途フレーム(frame)を取り付けた.差動歯車は左右の前輪(front wheel) の中間に設置する.差動歯車で採用した傘歯車(図5 の bevel gear A)が改造元の台車の車輪より大きくな るため,前輪は大型のゴム車輪と交換した.CVT ホイールとその舵角を調整する機構を搭載したユニットは 台車の前後方向に並進移動可能になるよう,フレームに対してリニアガイドにより支持する.X 型リンクの
(a) original cart (b) experimental model
Fig. 10 Original cart and experimental model of the adjustable lift cart
299 下端に取り付けられたピンがこのユニットに設けられた溝にはまっており,ユニットの並進移動によりX 型 リンクが動作する.CVT の摩擦接触部分には文献 15)と同様ウレタンを用いており,CVT ローラに対する CVT ホイールの予圧はネジで調整可能とした.CVT ホイールの舵角を調整する回転軸はアンギュラ軸受け で支持する.CVT ローラにはスラスト荷重がかかるため,両端の軸受けにはアンギュラ軸受を採用した. この装置はバックドライブ可能で,荷台が下降すると自走してしまう.機能検証機では対策していないが, 今後は取っ手にデッドマンスイッチを設け,作業者が手を離すとブレーキがかかるようにしたい. 4.2 制御装置 機能検証機の制御装置には Arduino16)を採用した.左右の前輪の回転数検出にはロータリーエンコーダ, 荷台の昇降高さの検出にはリニアポテンショメータを用いた.CVT の舵角の調整にはラジコン用のサーボ モータを用いた.これらの電源は電池から供給する.舵角調整に要するトルクはCVT 試験器15)で得たデー タを用いて,台車走行中も停止中も調整できる十分余力のあるサーボモータを選定した.CVT の舵角を定め る式(24)の入力値としては,まず仮想的な斜面の法線方向ベクトル
n
を定め,これを単位ベクトルn n n
ˆ
にしてプログラムの変数として入力する.また台車の進行方向の角度
dは初期値を定めた後に式(2)を積分 して得る.荷台の高さzはリニアポテンショメータの値を用いる. 制御装置には2 個のトグルスイッチで切り替える,以下の三つのモードを持たせた. 1) 走行モード:舵角
0.台車を走行させても荷台が昇降しない.一般的な台車としても使用できる. 2) 斜面モード:台車を走行させると荷台が一定の傾斜の仮想的な斜面に沿って上昇または下降する.作業 者は目的地が目視できた段階で,目的地到達までに荷台高さが目的地の高さに到達できるようにこのモ ードを設定することを想定している. 3) スイッチバックモード:台車を前後に往復運動させることで荷台が上昇または下降する. その他に実験用に,荷台を直接手で持って昇降させる昇降モード(舵角 2)を設けた. 4.3 実験 試作した機能検証機の動作を確認する試験を行った.荷台は無負荷としている. 4.3.1 走行試験 走行モードで,床に張り付けた巻き尺に沿って直進したときの走行距離を前輪のロータリーエンコーダで 測定した.5m,10m,20m 走行を各 10 回行った結果,測定値の平均値は順に 4.961m,9.931m,18.865m で,標準偏差は順に 0.01m,0.014m,0.011m となった.これらから距離の誤差は走行距離に依らず概ね 0.014m 以下程度であると言える.測定値の平均値が実際の走行距離より小さくなったのは前輪半径r
wが仕 様より大きいためと考え,実際の距離になるよう前輪半径を換算した.左右の車輪径に有意な違いはない. また,直径約3m の円軌道を一周した後の進行方向の角度を前輪のロータリーエンコーダで測定した.右 回り・左回りで各10 回走行した結果,測定値の平均値は 367 度,角度のバラつきは標準偏差で 2 度(1 周 に対して 0.6%)となった.角度の換算には上記で得た前輪半径r
wと輪距の設計値を用いた.測定値の平均 値が360 度にならなかったのは輪距が異なるためと考え,輪距w
を補正した.直進と円軌道走行の結果から 測定値のバラつきは実用的な範囲で十分小さいので走行距離としてロータリーエンコーダによる測定値を 使うことにする. 4.3.2 昇降試験 斜面モードで台車を直線的に走行させたときの走行距離と荷台の高さを測定した.仮想的な斜面の勾配は 1/8 勾配と設定して,法線方向ベクトルn
は上り斜面で
1 0 8
T,下り斜面で
1 0 8
Tとする.仮想 的な斜面に対する台車の進行方向の角度 d は 0 度とする.上り斜面,下り斜面それぞれの走行距離と荷台 の床からの高さの関係を図 12 に示す.図中,点は測定値である.細線は動作開始点を通る,設定した仮想300 的な斜面である.測定値は概ね設定した仮想的な斜面に乗って上昇・下降している.走行後の仮想的な斜面 との誤差の平均値は0.0095m でこれは昇降高さの 4.1%に相当する.誤差の標準偏差は 0.0083m となった. 台車の荷台と目的地の高さの差としてこの誤差は実用上小さいとは言えないので,今後低減する必要がある. 4.3.3 スイッチバックによる昇降試験 スイッチバックモードで台車を前後に往復運動させて荷台を上昇させたときの走行距離と荷台の高さを 測定した.仮想的な斜面の勾配は1/8 勾配と設定した.このとき法線方向ベクトル
n
は,前進のとき上り斜 面になるように
1 0 8
T,後退のときも上り斜面となるように
1 0 8
Tに切り替える.走行距離と荷 台の床からの高さの関係を図13 に示す.図 12 の昇降試験では荷台の上昇のために約 1.8m の前進が必要だ ったが,スイッチバックモードでは図 13 の左下の走行距離ゼロから出発して約 0.5m の前進と後退を交互 に繰り返すことで荷台を上昇させることができる.このモードは台車を短い距離のなかで昇降させたいとき に有効である. 4.3.4 円弧軌道を走行したときの昇降試験 斜面モードで円弧上を曲折しながら走行させたときの台車の変位と荷台の高さを測定した.仮想的な斜面 の勾配は4.3.2 項と同様に 1/8 勾配と設定し,法線方向ベクトルn
は
1 0 8
Tとする.仮想的な斜面に 対する台車の進行方向の角度
dの初期値は0 度とし,半径約 1.5m の半円に沿った場合(図中,R
1.5
) と,左車輪の角速度
L
0
とした場合で,それぞれ左へ曲折走行する.台車は仮想的な斜面に向かいU タ ーンするので,荷台は上昇した後,下降する.このときの荷台の軌道を図14 に示す.図 14 の(a)はxy
平面 に投影した水平方向の軌道,(b)はxz
平面に投影した垂直方向の軌道である.これらを3 次元的にプロット したのが(c)で,図中,球でプロットしたのが荷台の軌道で,面は設定した仮想的な斜面である.半径 1.5m の場合も
L
0
の場合も,荷台が仮想的な斜面に沿って上昇し,U ターンして下降していることがわかる.Fig. 12 Experimental result (upward and downward slope)
301 5 結言 人力で押して任意の距離だけ走行させたとき,同時に荷台を任意の高さだけ昇降する機能を持つ昇降台車 の設計と試作について述べた.本報ではまず台車の走行に応じて荷台を昇降させる機構として,台車の車輪 の回転軸と昇降機構の間に,複数の無段変速機(CVT)と差動歯車を組み合わせた「線形和機構」を適用でき ることを示した.また提案する昇降台車では線形和機構に使用する CVT の個数を削減できることを示し, そのときの変速比の式を導いた.更にローラとホイールを組み合わせてホイールの舵角を調整することで変 速比を可変にできる CVT の機構について検討し,X 型のリンクを備えた昇降台車の機構の設計について述 べた.更にこれらを組み合わせた台車が平面を任意の方向に直進または曲折して走行するときの CVT の変 速比とホイールの舵角の式を導いた.最後に機能検証機の試作と実験について述べた.台車を直進走行,前 後の往復走行,円弧上を曲折して走行させたときにそれぞれ荷台が昇降する結果を得て,本提案の機構と制 御の有効性を確認した. 今後の課題は,荷台の高さの誤差の低減,荷台の負荷容量増大のための CVT の負荷容量増大,仮想的な 斜面の法線方向ベクトルの設定方法(何m 走行して,荷台を何 mm 昇降させるかの設定)である.誤差低 減に対しては誤差を検出して補正する制御17)が考えられる.負荷容量増大に対しては例えばCVT のホイー ルの個数を増加する方法15)が考えられる.設定方法に対しては例えばマーカを目的地点に設置し,その3 次 元位置をカメラで計測する方法18)が考えられる. 謝辞 本研究を遂行するにあたり機能検証機の製作にご尽力いただいた,本学卒業研究生の田能孝君,吉岡大地 君,串田真也君,松島泰士君,秋友大明君,井口拓郎君,春藤啓太君に感謝します.
302 参考文献 1) 横手大輔,田能孝,吉岡大地,樋口峰夫:自動昇降台車の開発,日本設計工学会四国支部平成 26 年度 研究発表講演会,(2015), 31-32. 2) 横手大輔,串田真也,樋口峰夫:自動昇降台車の開発-CVT の舵角の検討-,第 33 回日本ロボット学会 学術講演会,(2015), 3D2-05. 3) 高尾淳子:運搬台車,特開 2004-243894,2004 年 9 月 2 日. 4) 谷口孝男,池田重晴,岡本隆雄,日高実:搬送台車,特開 2009-132316,2009 年 6 月 18 日. 5) 吹田夏樹, 成田泰晟, 入江寿弘, 新宮清志:段差乗り越え可能な展開車輪を用いた移動支援ロボットの 研究, 日本知能情報ファジィ学会第 31回ファジィシステムシンポジウム講演論文集, 31, WC2-1, (2015), 127-130. 6) 入江寿弘:ロボット及び荷台,特開 2016-74274,2016 年 5 月 12 日.
7) Goswami, A., Peshkin, M. A. and Colgate, J. E.: Passive Robotics: An Exploration of Mechanical Computation, Proceedings of 1990, IEEE International Conference on Robotics and Automation, (1990), 279-284.
8) Peshkin, M. A. and Colgate, J. E.: Cobots, Industrial Robot, 26, 5 (1999), 335-341.
9) Akella, P., Peshkin, M. A., Colgate, J. E., Wannasuphoprasit, W., Nagesh, N., Wells, J., Holland, S., Pearson, T. and Peacock, B.: Cobots for the automobile assembly line, 1999 International Conference on Robotics and Automation, Detroit MI, (1999), 728-733.
10) 平田泰久, 原麻美, 小菅一弘:パッシブロボティクス概念に基づいた知的歩行支援機の開発,日本ロボ ット学会誌,24, 2 (2006), 270-276.
11) 樋口峰夫:人間共存型作業補助アーム PAS-Arm の開発(基本構想とメカニズム),日本機械学会論文集 C 編,73, 730 (2007), 1762-1768.
12) Higuchi, M. and Ogasawara, T.: Development of a Human Symbiotic Assist Arm PAS-Arm, Proc. of 2009 IEEE 11th Int. Conf. on Rehabilitation Robotics, (2009), 491-497.
13) 樋口峰夫:線形和機構と人間共存型作業補助アーム PAS-Arm, バイオメカニズム学会誌,41, 2 (2017), 53-57.
14) Faulring, E. L., Colgate, J. E. and Peshkin, M. A.: Control and Performance of the Rotational-to-Linear Cobotic Transmission, Proceedings of the IEEE 14th Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems 2006, (2006), 103-107.
15) Higuchi, M. and Ogasawara, T.: Development of a Human Symbiotic Assist Arm PAS-Arm: Design of CVT, The 18th IEEE International Symposium on Robot and Human Interactive Communication,
(2009), 539-545.
16) 船田巧訳,Banzi, M. and Shiloh, M.: Arduino をはじめよう 第 3 版,オライリージャパン,(2015), 1. 17) 樋口峰夫,人間共存型作業補助アーム“PAS-Arm”の開発 第 5 報:案内面補正実験,第 29 回日本ロ
ボット学会学術講演会,(2011) , 3H3-6.
18) 河田淳治,森本滋郎,加治芳雄,樋口峰夫,藤澤正一郎:カメラ搭載マイコン基板によるタグの位置計 測とその評価,電気学会研究会資料,CT-19-061~069, (2019), 37-40.