都市道路における信号制御システムの開発
8
0
0
全文
(2) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2014-ITS-56 No.1 2014/3/6. lm (i, j, m, k ) を 乗 じ て 求 め ら れ る . こ こ で , 変 換 係 数 lm (i, j, m, k ) は待ち車列の平均車頭間隔に相当する.制御入 xi (i, j, m, k ). xe (i, j, m, k ). 力 u(i, j, m, k ) は(2)式によって決定され飽和特性を有する. (6)式で記述される信号制御システムは,単独信号交差点や. xo (i, j, m, k ). 幹線道路を対象にする場合にも同様に成立し,全ての道路 網で一貫性をもって記述することができる. 信号制御システムで,基準入力に許容渋滞長 lr (i, j, m, k ). xe (i, j, m, k 1). を,制御入力に 3 つの信号制御パラメータを,出力に渋滞 長をそれぞれ対応させる.その時,各信号交差点における 図1 Figure 1. 信号交差点における交通量収支. 渋滞長のフィードバック制御システムが図 2 で構成される.. Volume balance for each lane at each signalized. 制御システムにおいて制御偏差 e(i, j, m, k ) を次式で定義す る.. intersection.. e(i, j, m, k ) lr (i, j, m, k ) yc (i, j, m, k ) xo (i, j, m, k ) (i, j , m, k ) x (i, j , m, k ) xe (i, j , m, k ) 0. (2). ここで,i と j は図 5 に示されるように信号交差点の位置,. (7). 各信号交差点の各流入路における飽和度は一般に一様では なく,飽和度が最大となる流入路を優先的に制御する考え より,以下の関数 g (i, j, m, k ) を定義する.. m は信号交差点への車の流入路(m = 1 は東行き,m = 2 は. g (i, j , m, k ) . 南行き,m = 3 は北行き,m = 4 は西行き)をそれぞれ表す. また, xe (i, j, m, k ) , xi (i, j, m, k ) , xo (i, j, m, k ) はそれぞれ. e(i, j , m, k ) 0 0 e ( i , j , m , k ) e(i, j , m, k ) 0 . 超過流入交通量,流入交通量,捌け交通量を表し,超過流. (8). 入交通量は流入路の黄信号終了時における待ち車列台数を. 2 方向交通都市道路網の信号制御システムの目的は,次式. 表す.渋滞の発生,継続,消滅のメカニズムは(1)式に基づ. の評価関数 J n (k ) を最小にする制御入力 u(i, j, m, k ) ,すなわ. いて車線単位で以下のように定量的に記述される.. ち,信号制御パラメータを統一的に探索することである.. i). 各信号交差点における渋滞は,超過流入交通量. L. J n (k ) . xe (i, j, m, k ) が零より大きくなるとき発生する.すなわ. xi (i, j , m, k ) xo (i, j , m, k ) ii). (3). 4. g (i, j, m, k ). (9). i 1 j 1 m 1. ち,. xe (i, j , m, k 1) 0 and. N. (6)式で記述される信号都市道路網の制御システムは,渋 滞流や非渋滞流にかかわらず成立する交通量収支に基づい. 渋滞は,超過流入交通量 xe (i, j, m, k ) が零以下になると. ており,ラッシュ時,非ラッシュ時を問わず適用すること. きに消滅する.すなわち,. ができる.. xe (i, j , m, k 1) 0 and xe (i, j , m, k 1) xi (i, j, m, k ) xo (i, j, m, k ). (4). iii) 渋滞は,超過流入交通量 xe (i, j, m, k ) が正値を保つ間継. xe (i, j , m, k 1) xi (i, j, m, k ) xo (i, j , m, k ). 3 つの信号制御パラメータを統一的に制御して信号交差 点の流入路における渋滞を解消することが,本稿で提案す. 続する.すなわち,. xe (i, j , m, k 1) 0 and. 3. 信号制御法. る信号制御システムの目的である.ここでは,単独信号交 (5). (2)式の x (i, j, m, k ) は各流入路の交通処理量で交通容量. Signal control algorithm. に青信号スプリットを乗じて求められ, (i, j, m, k ) はある 交通流のもとで xo (i, j, m, k ) を x (i, j, m, k ) で除した比率で. Controller parameters. 捌け率と呼ぶ.捌け交通量をある交通流のもとで 3 つの信. +. 号制御パラメータ(サイクル長,青信号スプリット,オフ. -. セット)で制御できると仮定して,制御入力 u(i, j, m, k ) で 置き換えると,渋滞長の信号制御システムは,次式の非線 形ダイナミックシステムで記述される.. xe (i, j , m, k ) xe (i, j , m, k 1) xi (i, j , m, k ) u (i, j , m, k ) y (i, j , m, k ) l (i, j , m, k ) x (i, j , m, k ) m e c. 図2. e(i, j, m, k ). Traffic flow. u(i, j, m, k ). yc (i, j, m, k ). 各信号交差点における渋滞長のフィードバック制御 システム. (6). 渋 滞 長 yc (i, j, m, k ) は 状 態 変 数 xe (i, j, m, k ) に 変 換 係 数. ⓒ 2014 Information Processing Society of Japan. lr (i, j, m, k ). Signal controller. Figure 2. Feedback control system of congestion length at each signalized intersection.. 2.
(3) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2014-ITS-56 No.1 2014/3/6. 差点や幹線道路,都市道路網における信号制御法について 提案する.. の積より算定する.. 3.1 単独信号交差点. Step6. 超過流入交通量 xe( n) (m, k ) を車線単位の交通量収支. 都市道路網の最も基本的な構成単位である単独信号交差 点における信号制御法としてバランス制御アルゴリズムを 提案する.ここで,バランス制御アルゴリズムとは,図 3 で表される信号交差点において互いに交差する流入路の制 御偏差の最大値を等しくし,かつ,評価関数 J s (k ) を最小 にする 2 つの信号制御パラメータ(サイクル長と青信号ス プリット) を統一的, 逐次的に探索する計算法と定義する.. . に基づいて算定する.. xe(n) (m, k ) xi(n) (m, k ) xo(n) (m, k ). (13). ( n) ( n) xo (m, k ) (m, k ) x (m, k ) ( n) xe (m, k ) 0. (14). Step7. 渋滞長 yc( n) (m, k ) を変換係数 lm (m, k ) を用いて車線 単位で算定する.. 4. J s (k ) . Step5. 各車線の青時間をサイクル長と青信号スプリット. (10). g (m, k ). m 1. バランス制御アルゴリズムの計算手順を示すと以下のよ. yc(n) (m, k ) lm (m, k ) xe(n) (m, k ). (15). Step8. 単独信号交差点における信号制御パラメータの関 係式に基づいて,全流入路の青信号スプリットや青. うになる. Step1. 各信号交差点における現示と信号制御パラメータ (サイクル長,青信号スプリット)の初期値や上下 限値,きざみ幅,ならびに比率 (m, k ) や,変換係 数 lm (m, k ) ,閾値 などを設定する.m = 1 とおい て以下の計算を行う. Step2. 時間区間 T をサイクル長 c (yn) (m, k ) に等しく設定 し,流入交通量 xi( n) (m, k ) を入力する.ここで,上 付添字(n)は繰り返し計算回数を表す. Step3. 渋滞時の流入交通量を車線単位で再計算する.. 時間などを車線単位で算定する. Step9. もし,次の制御指標. max{ e ( ) (1, k ) |,| e ( ) (2, k ) |, (16) | e ( ) (3, k ) |,| e ( ) (4, k ) |} 0 を満足すれば,得られたサイクル長と青信号スプリ ットを最適値とし,k = k + 1 とおいて Step2 へ帰る. ここで上付添字 ( ) , ( ) , ( ) , ( ) は各流入路に対 する繰り返し計算回数を表す. Step10. 一方,次の制御指標. xi(n) (m, k ) xi(n) (m, k ) xe (m, k 1). (11). Step4. 信号交差点の各流入路の交通処理量 x( n) (m, k ) を, 交通容量を用いて車線別に算定する.. ( n) (m, k ) r ( n) (m, k ) c (m, k ) xl gl xl ( n) ( n) (12) xs (m, k ) rgs (m, k ) c xs (m, k ) ( n) ( n) xr (m, k ) rgr (m, k ) c xr (m, k ) ここで, xl (m, k ) , xs (m, k ) , xr (m, k ) はそれぞ れ左折,直進,右折 車線の交通処理 量を表し , c xl (m, k ) , c xs (m, k ) , c xr (m, k ) は各車線の交通容量を, ( n) ( n) ( n) (m, k ) , rgr (m, k ) は各車線の また, rgl (m, k ) , rgs. 青信号スプリットをそれぞれ表す.. max{ e ( ) (1, k ) |,| e ( ) (2, k ) |, | e ( ) (3, k ) |,| e ( ) (4, k ) |} (17) 0 が成立すれば,制御偏差が最大となった流入路の青 信 号 ス プリ ット を きざ み 幅 rgl (m) , rgs (m) , rgr (m) だけそれぞれ微小増加させる.. r ( n 1) (m, k ) r ( n) (m, k ) r (m) gl gl gl ( n 1) ( n) (18) rgs (m, k ) rgs (m, k ) rgs (m) ( n 1) ( n) rgr (m, k ) rgr (m, k ) rgr (m) ここで,すべての流入路において直進交通が主流で ( n 1) ( n 1) ( n 1) ( n 1) (m, k ) rgr (m, k ) rgs (m, k ) rgl (m, k ) , rgs. ( n 1) (m, k ) rgs, max が なる関係を仮定した.もし, rgs. m=2. ( n 1) (m, k ) rgs, max が 成立すれば Step11 へ進み, rgs. 成立する場合は Step4 へ帰る.ここで rgs, max は直進 m=1 m=4 m=3 図3 Figure 3. 単独信号交差点の交通流. Two-way traffic flow at single signalized intersection.. ⓒ 2014 Information Processing Society of Japan. 青信号スプリットの上限値を表す. Step11. サイクル長が次式によってきざみ幅 c y (m) だけ 微小増加される.. c (yn 1) (m, k ) c (yn) (m, k ) c y (m). (19). もし,c (yn 1) (m, k ) c y, max が成立すれば k = k + 1 と おいて Step 2 へ帰り, c (yn 1) (m, k ) c y, max が成立す. 3.
(4) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2014-ITS-56 No.1 2014/3/6. る場合は Step 2 へ帰る.ここで,c y , max はサイクル 長の上限値を表す. このバランス制御アルゴリズムは,初期時刻 k = 1 から 最終時刻 k = kf まで逐次実行される.また,サイクル長と 青信号スプリットの初期値は下限値より出発し,式(16)の 制御指標が満足されるまで式(18)と式(19)によって修正さ れる. 3.2 幹線道路 単独信号交差点がリンクで直列に接続された図 4 の幹線 道路における信号制御法は,単独信号交差点におけるバラ ンス制御アルゴリズムをオフセットに関して拡張すること により記述される.バランス制御アルゴリズムでは,信号 交差点において互いに交差する流入路の制御偏差の最大値 を等しくし,かつ,評価関数 J a (k ) を最小にする 3 つの信 号制御パラメータを統一的,逐次的に探索する. N. J a (k ) . (サイクル長,青信号スプリット)の初期値や上下 限値,きざみ幅,ならびに比率 ( j, m, k ) や,変換 係数 lm ( j, m, k ) ,閾値 などを設定する.m = 1 と おいて以下の計算を行う.. 定し,流入交通量 xi( n) ( j, m, k ) を入力する. Step3. 渋滞時の流入交通量を車線単位で再計算する.. xi(n) ( j, m, k ) xi(n) ( j, m, k ) xe ( j, m, k 1). (21). Step4. 信号交差点の各流入路の交通処理量 x( n) ( j, m, k ) を, 交通容量を用いて車線別に算定する.. ( n) ( j , m, k ) r ( n) ( j , m, k ) c ( j , m, k ) xl gl xl ( n) (n) (22) xs ( j , m, k ) rgs ( j , m, k ) c xs ( j , m, k ) ( n) (n) xr ( j , m, k ) rgr ( j , m, k ) c xr ( j , m, k ) ここで, xl ( j, m, k ) , xs ( j, m, k ) , xr ( j, m, k ) は それぞれ左折,直進, 右折車線の交通処理量を表し, c xl ( j, m, k ) , cxs ( j, m, k ) , c xr ( j, m, k ) は各車線の交通 ( n) ( j, m, k ) 容量を,また,rgl. ( n) ( j, m, k ) ,rgs. ( n) ( j, m, k ) ,rgr. は各車線の青信号スプリットをそれぞれ表す. N. 2. m=2. Figure 4. (23). ( n) ( n) xo ( j , m, k ) ( j , m, k ) x ( j , m, k ) ( n) xe ( j , m, k ) 0. (24). Step7. 渋滞長 yc(n) ( j, m, k ) を変換係数 lm ( j, m, k ) を用いて 車線単位で算定する.. yc(n) ( j, m, k ) lm ( j, m, k ) xe(n) ( j, m, k ). (25). Step8. 各信号交差点における信号制御パラメータの関係. Step9. もし,次の制御指標 (26) | e ( ) ( j ,3, k ) |,| e ( ) ( j ,4, k ) |} 0 を満足すれば,得られたサイクル長と青信号スプリ ットを最適値として Step12 へ進む.. max{| e ( ) ( j ,1, k ) |, | e ( ) ( j ,2, k ) |, | e ( ) ( j ,3, k ) |, | e ( ) ( j ,4, k ) |} (27) 0 が成立すれば,制御偏差が最大となった流入路の青 信号スプリットをきざみ幅 rgl ( j, m) , rgs ( j, m) ,. rgr ( j, m) だけそれぞれ微小増加させる. r ( n 1) ( j , m, k ) r ( n) ( j , m, k ) r ( j , m) gl gl gl ( n 1) ( n) (28) rgs ( j , m, k ) rgs ( j , m, k ) rgs ( j , m) ( n 1) ( n) rgr ( j , m, k ) rgr ( j , m, k ) rgr ( j , m) ここで,すべての流入路において直進交通が主流で ( n 1) ( n 1) rgs ( j, m, k ) rgl ( j, m, k ). ,. ( n 1) ( n 1) rgs ( j, m, k ) rgr ( j, m, k ) なる関係を仮定した. ( n 1) ( j, m, k ) rgs, max が成立すれば Step11 へ もし,rgs ( n 1) ( j, m, k ) rgs, max が成立する場合は Step4 進み,rgs. へ帰る.ここで rgs, max は直進青信号スプリットの 上限値を表す. Step11. サイクル長が次式によってきざみ幅 c y ( j, m) だけ 微小増加される.. Arterial. :Signalized intersection 図4. xe(n) ( j, m, k ) xi(n) ( j, m, k ) xo(n) ( j, m, k ). Step10. 一方,次の制御指標. Step2. 時間区間 T をサイクル長 c (yn) ( j, m, k ) に等しく設. m=4. 支に基づいて算定する.. max{| e ( ) ( j ,1, k ) |,| e ( ) ( j ,2, k ) |,. Step1. 各信号交差点における現示と信号制御パラメータ. m=3. Step6. 超過流入交通量 xe( n) ( j, m, k ) を車線単位の交通量収. 間などを車線単位で算定する. (20). j 1 m 1. m=1. の積より算定する.. 式に基づいて,全流入路の青信号スプリットや青時. 4. g ( j, m, k ). j=1. Step5. 各車線の青時間をサイクル長と青信号スプリット. 幹線道路の交通流. Two-way traffic flows along arterial.. ⓒ 2014 Information Processing Society of Japan. c (yn 1) ( j, m, k ) c (yn) ( j, m, k ) c y ( j, m). (29). もし, c (yn 1) ( j, m, k ) c y, max が成立すれば Step 12 へ 進 み , c (yn 1) ( j, m, k ) c y, max が 成 立 す る 場 合は Step 2 へ帰る.ここで, c y , max はサイクル長の上限. 4.
(5) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2014-ITS-56 No.1 2014/3/6. 値を表す. Step12. 探索されたサイクル長と青信号スプリットの最適. N. J a (k ) . g ( j, m, k ) i 1,2,, L. (30). j 1 m 1. 値を用いて, 幹線道路の連続通過帯幅を最大にする 平等オフセットが Fieser の方法11)により探索され. 4. Step2. オフセット制御の観点から,Step 1 で探索された. る.. サイクル長の最大値を都市道路網内における全て. このバランス制御アルゴリズムは,初期時刻 k = 1 から 最終時刻 k = kf まで,また,j = 1 から j = N までの全信号. の信号交差点のサイクル長として共通に設定し, 式 (30)の評価関数 J a (k ) を最小にする残り 2 つの信. 交差点について逐次実行される.この信号制御アルゴリズ. 号制御パラメータがバランス制御アルゴリズムを. ムでは,サイクル長と青信号スプリットの初期値は下限値 (29)によって修正される.また,オフセット制御の関係か. 用いて再度探索される. Step3. 隣接して並行する 2 つの幹線道路間を接続するリ ンクのオフセット値 toff * (i, j, m, k ) を,その閉路に. ら,サイクル長は N 地点の信号交差点の最大値が共通に設. 関する制約条件のもとで式(9)の評価関数 J n (k ) を. 定され,各信号交差点の青信号スプリットは改めて再計算. 最小にするように算定する. i) 最初に,2 つの並行する幹線道路間を接続するリ ンク間において指標 xi (i, j, m, k ) / x (i, j, m, k ) が最. より出発し,式(26)の制御指標が満足されるまで式(28)と式. される. 3.3 都市道路網. 大となる信号交差点間のオフセットを Fieser の 方法により算定する.ここで, xi (i, j, m, k ) は次. 単独信号交差点がリンクで格子状に接続された図 5 の都 市道路網における信号制御法は,幹線道路におけるバラン. 式で表される渋滞時の流入交通量を表す. xi (i, j, m, k ) xe (i, j, m, k 1) xi (i, j, m, k ) (31). ス制御アルゴリズムを,幹線道路に交差する方向のオフセ ットに関して拡張することにより記述される.ここでは, 都市道路網における信号制御アルゴリズムをネットワーク 制御アルゴリズムと呼ぶことにする. ネットワーク制御アルゴリズムは,幹線道路の渋滞長制. ii) 次に,オフセットの閉路に関する制約条件のもと で残りの信号交差点間のオフセットを算定する. 以上の制御アルゴリズムを初期時刻 k = 1 から最終時刻 k = kf まで逐次繰り返す.. 御でその有効性が確認されたバランス制御アルゴリズムを 用い,式(9)で表される 2 方向交通都市道路網の評価関数を 最小にする 3 つの信号制御パラメータを段階的に,かつ統 一的に探索する. Step1. 各幹線道路毎に,式(30)で表される幹線道路の評価 関数 J a (k ) を最小にするように,3 つの信号制御パ ラメータがバランス制御アルゴリズムを用いて探 索される.. j=1. 2. 3. .... N. Arterial. i=1 m=2 m=1. 2. Arterial. Figure 6. m=4. m=3. 図6. Arterial. 3 . ... Arterial. L. 表 1 Table 1. ネットワーク制御アルゴリズムの階層構造 Hierarchical structure of network control algorithm. ネットワーク制御アルゴリズムの評価関数 Performance criteria of network control algorithm. Step Step 1. : Signalized intersection Step 2 図5 Figure 5. 都市道路網の交通流. Two-way traffic flows in network.. ⓒ 2014 Information Processing Society of Japan. Step 3. Performance criteria Minimize J a (k ). c y , rg , t off Minimize J a (k ). rg , t off Minimize J a (k ). t off *. 5.
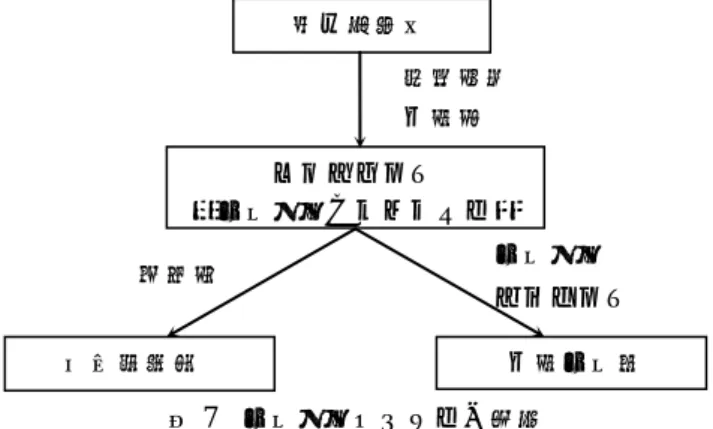
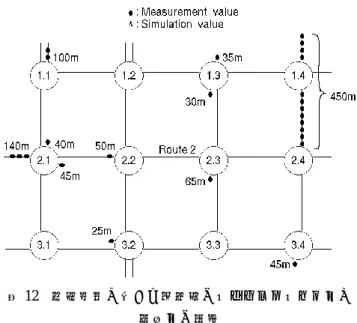
(6) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2014-ITS-56 No.1 2014/3/6. ネットワーク制御アルゴリズムの各 Step は,図 6 と表 1 に 表さ れるよ うに 階層構 造に なって おり, c y (i, j, m, k ) ,. 数,構成などについて決定する.信号制御アルゴリズムの. rg (i, j, m, k ) , toff (i, j, m, k ) , toff * (i, j, m, k ) の順に値が求め. 開発では,都市道路網の各信号交差点における渋滞長の総. られる.すなわち,最初に Step 1 で全ての信号交差点に共 通に設定されるサイクル長 c y (i, j, m, k ) が探索される.つぎ. 和を最小にする 3 つの信号制御パラメータを統一的に探索. に,Step 2 で幹線道路上の信号交差点の青信号スプリット rg (i, j, m, k ) とオフセット toff (i, j, m, k ) が,評価関数 J a (k ) を 最小にするように探索される.最後に,Step 3 で幹線道路 間を接続するリンクのオフセット toff * (i, j, m, k ) が,その閉 路に関する制約条件のもとで評価関数 J n (k ) を最小にする. 信号制御システムの記述では,システムの記述や評価関. する計算手順を求める.シミュレーションでは,対象とす る道路網の道路条件や交通条件をはじめ,信号制御パラメ ータの上下限値やきざみ幅,初期値などを入力し,シミュ レーションプログラムを用いて 3 つの信号制御パラメータ の最適値や各流入路の渋滞長などを求める. 最後に,求められた解が妥当で満足できるものであれば. ように求められる.. シミュレーションは終了し,そうでなければ信号制御シス. 4. 信号制御システムの開発. テムの記述に戻って再検討する.. 4.1 システム構成. 4.3 開発事例. 都市道路網の信号制御システムは,図 7 に示されるよう. 図 8 で示される開発手順に従って,福山市内と広島市内. に,車両感知器よりリンク走行速度と交通量をオンライン. で信号制御システムを開発した事例について紹介する.. 入力し,3 章で提案した信号制御アルゴリズムを用いて 3. 12 の主要信号交差点から構成される福山市内道路網の渋. つの信号制御パラメータの最適値を探索する.つぎに,そ. 滞長制御のシミュレーションは,(6)式の信号制御システム. れらを用いて信号機の現示をリアルタイムで制御し評価関. の記述に基づき,ネットワーク制御アルゴリズムを用いて. 数を最小化する.また,主要信号交差点の渋滞長を可変表. 行った.福山市内道路網の道路条件や交通条件,信号制御. 示板に出力し,一般のドライバーに提供する.信号制御シ. 条件の調査データを入力データとして使用した.流入交通. ステムを構成する各ハードウェア装置は,広域ネットワー. 量や捌け交通量,超過流入交通量などは車線単位,サイク. ク(WAN)に接続される.. ル長単位で人手を用いて測定した.本稿で提案した信号制. 4.2 システム開発. 御システムは確定的であり,入力データが同一であれば同. 都市道路網の交通流の円滑化と安全化を交通流ダイナミ. 一のシミュレーション結果が得られる.. クスのディジタル制御の観点から実現する信号制御システ. 3 つの信号制御パラメータをネットワーク制御アルゴリ. ムの開発は,都市道路網の道路条件や交通条件が与えられ. ズムにより流入交通量や待ち車列台数,リンク走行速度な. ていると仮定すると,図 8 に示される手順で行われる. 道. どの時間変動に対応して広範囲に,きめ細かく,評価関数. 路解析では,交通容量解析や信号制御に必要な都市道路網 の各リンクのリンク長や車線数,車線幅員,側方余裕,設. 開始. 計速度,交通規制などをはじめ,各信号交差点の交差形状 や車線構成などについて調査する.交通解析では,交通量. 道路解析. 収支や交通容量を解析するために必要な信号交差点の各流 交通解析. 入路における流入交通量や待ち車列台数,待ち車列長,大 型車混入率,路線バスの運行頻度,捌け交通量,左折率な. 交通容量解析. どについて調査する.交通容量解析では,必要な変数や定 数の値を求める.. 信号制御 システムの記述 車両感知器 信号制御 アルゴリズムの開発. 走行速度 交通量. シミュレーション. コンピュータ (信号制御アルゴリズム) 信号制御. 渋滞長. パラメータ. 可変表示板. 信号制御システムの構成. Configuration of signal control system.. ⓒ 2014 Information Processing Society of Japan. 満足 できる解 Yes 終了. 交通信号機. 図7 Figure 7. No. 図8 Figure 8. 信号制御システムの開発手順. Development procedure of signal control system.. 6.
(7) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2014-ITS-56 No.1 2014/3/6. J n (k ) を最小にするように統一的に制御した結果,図 9~図 12 に示されるように,現実には多くの信号交差点で朝夕の ラッシュ時に渋滞が発生しているにも関わらず,シミュレ ーションでは全ての信号交差点の全流入路の渋滞長を 0 m に制御することができた.このことより,本稿で提案した 信号制御システムと信号制御アルゴリズムは,現在使用さ れている信号制御法であるパターン選択法に比べて有効に 働くことを確認した.さらに,ここで提案した信号制御シ ステムと信号制御アルゴリズムは,交通流や制御対象の規 模に関わらず,すなわち,渋滞流や非渋滞流,また,単独 信号交差点や幹線道路,都市道路網において一貫性をもっ て記述でき,制御性能も有効であることを確認することが. 図 11 三吉町南 1 丁目信号交差点における南行き方向の直進. できた 6), 7), 12).. 車線に対する渋滞長のシミュレーション値と測定値の比較 Figure 11. 5. まとめ. Comparison of congestion length for straightfor-. ward lane between simulation value and measurement value for. 本稿では,交通量や待ち車列台数,リンク走行速度など. m = 2 at Miyoshi-cho Minami 1-chome signalized intersection.. の時間変動に対応して 3 つの信号制御パラメータを統一的 に制御し,各信号交差点における渋滞長の総和を最小にす る信号制御システムの開発について提案した.研究内容を 要約すると以下のようになる. シミュレーション値. 測定値. 240. 渋滞長(m). 200 160 120 80 40 0 17:01 17:11 17:22 17:32 17:43 17:54 18:04 18:15 18:26 18:36 18:47 18:58. 時刻. 図9. 国泰寺信号交差点の西行き流入路における直進車線. 図 12. 直進車線に対する渋滞長のシミュレーション値と. の渋滞長の測定値とシミュレーション値の比較 Figure 9. Comparison of congestion length for straightforward. lane between simulation value and measurement value for m = 4. 測定値の比較 Figure 12. Comparison of congestion length for straightfor-. ward lane between simulation value and measurement value.. at Kokutaiji signalized intersection. (i) :シミュレーション値. N. :測定値. j=1 2 (右折) (右折) (右折) 26m 32m 52m. 信号交差点の各流入路における渋滞長の総和を最小 にする信号制御システムは,車線単位,サイクル長単. 3. 位の交通流ダイナミクスに基づいて記述される. 国道 2 号線. (ii). 渋滞長の信号制御システムは,単独信号交差点や幹線 道路,都市道路網において非線形ダイナミックシステ. 52m 19m 65m 19m (直進) (直左) (直左) (右折). 213m (直進). :信号交差点. 図 10. 広島市内幹線道路における渋滞長の測定値とシミ ュレーション値の比較. Figure 10. Comparison of congestion length between. simulation value and measurement value along the arterial in Hiroshima city.. ⓒ 2014 Information Processing Society of Japan. ムで一貫性をもって記述することができる. (iii) 信号制御パラメータの最適値を探索するアルゴリズ ムは,単独信号交差点から幹線道路へ,また,幹線道 路から都市道路網へ容易に拡張することができる. (iv) 道路解析から交通解析,交通容量解析,信号制御シス テムの記述,信号制御アルゴリズムの開発,シミュレ ーションを経て,解の判定に至る信号制御システムの 開発手順について,体系的に示した.. 7.
(8) 情報処理学会研究報告 IPSJ SIG Technical Report (v). Vol.2014-ITS-56 No.1 2014/3/6. 提案した信号制御システムや信号制御アルゴリズム, 開発手順を用いて広島県福山市内と広島市内の道路 網を対象にシミュレーションを行った.その結果,現 実には渋滞が発生しているリンクで,渋滞長を 0 m に 制御できることをシミュレーションで確認すること ができた.. 今後,本稿で提案した信号制御システムや信号制御アル ゴリズム,システム開発手順を他の道路網に適用し,有効 性を確認できればと考えている.また, 信号制御システム の対象となる都市道路網の OD 旅行時間を推定し, 信号制 御法と旅行時間の関係について把握できればと考えてい る.. 参考文献 1) 鈴木道雄編著:新体系土木工学 62 道路(Ⅱ)―計画と幾何設 計―,技報堂出版 (1980). 2) P. B. Hunt, D.I.Robertson, R.D.Bretherton and R.I.Winton, SCOOT-A Traffic Responsive Method of Coordinating Signals, TRRL Laboratory Report 1014 (1981). 3) E. J. Davison and U.Ozguner, Decentralized Control of Traffic Networks, IEEE Trans., AC-28, pp.677-688 (1983). 4) K. Hayashi and M.Sugimoto, Signal Control System (MODERATO) in JAPAN, Proc. of IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems, pp.988-992 (1999). 5) 宇佐美,榊原:道路網の信号制御システム,計測と制御,41-3, pp.205-210 (2002). 6) 清水,真柴,傍田,小林:幹線道路の渋滞長制御,情報処理 学会論文誌,42-7, pp.1876-1884 (2001). 7) 石川,清水,傍田,小林:交通ネットワークの渋滞長制御, 情報処理学会論文誌,45-4, pp.1154-1162 (2004). 8) 小林,清水:交通流の円滑性の解析,計測と制御,41-3, pp.181-186 (2002). 9) H. Shimizu, M. Kobayashi, H.Fujii and S.Katagiri, An Analysis of Mean Link Travel Time in Urban Road Networks and Its Applications, Proc. of SICE Annual Conference 2007, pp.1438-1443 (2007). 10) 天目,山口:道路網の動的経路誘導システム,計測と制御, 41-3, pp.211-216 (2002). 11) 塙克郎:交通信号,技術書院,pp.56-67 (1966). 12) H. Fujii and H.Shimizu, A Development of Signal Control System for Congestion Length along arterials, Int. J. Advanced Mechatronic Systems, Vol.3, No.4, pp. 288-296 (2011).. ⓒ 2014 Information Processing Society of Japan. 8.
(9)
図


関連したドキュメント
In order to improve the coordination of signal setting with traffic assignment, this paper created a traffic control algorithm considering traffic assignment; meanwhile, the link
Apalara; Well-posedness and exponential stability for a linear damped Timoshenko system with second sound and internal distributed delay, Electronic Journal of Differential
Moreover, to obtain the time-decay rate in L q norm of solutions in Theorem 1.1, we first find the Green’s matrix for the linear system using the Fourier transform and then obtain
H ernández , Positive and free boundary solutions to singular nonlinear elliptic problems with absorption; An overview and open problems, in: Proceedings of the Variational
By using the first order averaging method and some mathematical technique on estimating the number of the zeros, we show that under a class of piecewise smooth quartic
Keywords: Convex order ; Fréchet distribution ; Median ; Mittag-Leffler distribution ; Mittag- Leffler function ; Stable distribution ; Stochastic order.. AMS MSC 2010: Primary 60E05
Inside this class, we identify a new subclass of Liouvillian integrable systems, under suitable conditions such Liouvillian integrable systems can have at most one limit cycle, and
Here we continue this line of research and study a quasistatic frictionless contact problem for an electro-viscoelastic material, in the framework of the MTCM, when the foundation
