この事業は、競輪の補助金を受けて実施したものです。
URL : http://ringring-keirin.jp/
安全運転支援システムの統合シミュレータに 関するフィージビリティスタディ
報 告 書
- 要 旨 -
平成 22 年 3 月
財団法人 機械システム振興協会 委託先 財団法人日本自動車研究所
システム開発
21-F-7
序
わ が 国 経 済 の 安 定 成 長 へ の 推 進 に あ た り 、 機 械 情 報 産 業 を め ぐ る 経 済 的 、社 会 的 諸 条 件 は 急 速 な 変 化 を 見 せ て お り 、社 会 生 活 に お け る 環 境 、都 市 、 防 災 、 住 宅 、 福 祉 、 教 育 等 、 直 面 す る 問 題 の 解 決 を 図 る た め に は 技 術 開 発 力 の 強 化 に 加 え て 、多 様 化 、高 度 化 す る 社 会 的 ニ ー ズ に 適 応 す る 機 械 情 報 シ ス テ ム の 研 究 開 発 が 必 要 で あ り ま す 。
こ の よ う な 社 会 情 勢 の 変 化 に 対 応 す る た め 、財 団 法 人 機 械 シ ス テ ム 振 興 協 会 で は 、財 団 法 人 JKA か ら 機 械 工 業 振 興 資 金 の 交 付 を 受 け て 、シ ス テ ム 技 術 開 発 調 査 研 究 事 業 、シ ス テ ム 開 発 事 業 、新 機 械 シ ス テ ム 普 及 促 進 事 業 を 実 施 し て お り ま す 。
こ の う ち 、シ ス テ ム 技 術 開 発 調 査 研 究 事 業 お よ び シ ス テ ム 開 発 事 業 に つ い て は 、 当 協 会 に 総 合 シ ス テ ム 調 査 開 発 委 員 会 (委 員 長 : 東 京 大 学 名 誉 教 授 藤 正 巖 氏 ) を 設 置 し 、 同 委 員 会 の ご 指 導 の も と に 推 進 し て お り ま す 。
本「 安 全 運 転 支 援 シ ス テ ム の 統 合 シ ミ ュ レ ー タ に 関 す る フ ィ ー ジ ビ リ テ ィ ス タ デ ィ 」は 、 上 記 事 業 の 一 環 と し て 、当 協 会 が 財 団 法 人 日 本 自 動 車 研 究 所 に 委 託 し 、実 施 し た 成 果 を ま と め た も の で 、関 係 諸 分 野 の 皆 様 方 の お 役 に 立 て れ ば 幸 い で あ り ま す 。
平 成 22 年 3 月
財 団 法 人 機 械 シ ス テ ム 振 興 協 会
は じ め に
「 安 全 運 転 支 援 シ ス テ ム の 統 合 シ ミ ュ レ ー タ に 関 す る フ ィ ー ジ ビ リ テ ィ ス タ デ ィ 」 は 財 団 法 人 機 械 シ ス テ ム 振 興 協 会 か ら の 平 成 21 年 度 委 託 事 業 と し て 実 施 し た も の で あ る 。本 F/S で は 平 成 20 年 度 に 同 協 会 か ら 委 託 さ れ た「 安 全 運 転 支 援 シ ス テ ム の 通 信 系 シ ミ ュ レ ー タ に 関 す る フ ィ ー ジ ビ リ テ ィ ス タ デ ィ 」 の 成 果 を も と に 、 安 全 運 転 支 援 シ ス テ ム を 対 象 と し た 統 合 シ ミ ュ レ ー シ ョ ン 環 境 を 試 み た も の で あ る 。
安 全 運 転 の 実 現 は ITSの 主 要 な 目 的 の 一 つ で あ る 。 現 在 、 日 本 の み な ら ず 欧 州 、 米 国 に お い て 通 信 を 用 い た 安 全 運 転 支 援 シ ス テ ム の 検 討 が 行 わ れ て い る 。 こ う し た 通 信 を 用 い た 運 転 支 援 シ ス テ ム が 有 効 に 機 能 す る か ど う か を 確 認 す る た め 、 こ れ ま で 世 界 各 国 で 様 々 な 実 証 実 験 が 行 わ れ て き た 。 し か し 、 テ ス ト コ ー ス あ る い は 実 際 の 道 路 に お い て 車 両 を 用 い て シ ス テ ム の 有 効 性 を 確 認 す る こ と は 費 用 が か か る こ と に 加 え 、様 々 な 実 験 上 の 制 約 に よ り 限 定 さ れ た 成 果 し か 得 る こ と し か で き な か っ た 。 計 算 機 に よ る シ ミ ュ レ ー シ ョ ン に よ っ て シ ス テ ム の 動 作 を 予 測 し 実 験 の 結 果 を 補 完 す る 、 あ る い は シ ス テ ム 開 発 の 初 期 段 階 に そ の 効 果 の 見 通 し を つ け る 試 み に つ い て は 、 既 に 様 々 な 機 関 が 研 究 を 行 い 、 成 果 も 発 表 さ れ て い る 。 し か し 、 安 全 運 転 支 援 と い う 、 地 形 や 交 通 流 、 情 報 提 供 の 仕 方 、 車 両 の 運 転 者 の 行 動 と い う 要 素 が 相 互 に 絡 み 合 っ た 現 象 を 表 現 す る た め に は 、 そ れ ぞ れ の 事 象 を 妥 当 に 表 現 す る の み な ら ず 、 事 象 間 の 相 互 作 用 も 統 一 的 に 扱 う 必 要 が あ り 、 こ れ ま で そ う し た 総 合 的 な 研 究 実 施 例 は 海 外 も 含 め て ほ と ん ど な か っ た 。
本 報 告 は 、 こ れ ま で に 個 別 に 開 発 さ れ て き た 交 通 流 、 情 報 提 供 、 運 転 者 の 行 動 に つ い て の シ ミ ュ レ ー タ を 統 合 し 、 安 全 運 転 支 援 シ ス テ ム 全 体 の 動 作 を 計 算 機 上 で 予 測 す る 試 み に 関 わ る も の で あ る 。
対 象 分 野 の 異 な る そ れ ぞ れ の シ ミ ュ レ ー タ を ど の よ う に 統 合 し 、 動 作 の 検 証 を ど の よ う に 実 施 し て い っ た か に つ い て 本 報 告 が 述 べ る 検 討 内 容 は 、 今 後 の ITS の 様 々 な 分 野 で の 統 合 的 な シ ミ ュ レ ー タ の 開 発 や 利 用 に 役 立 つ も の と 考 え る 。
本 F/S 実 施 に あ た っ て は 、 財 団 法 人 日 本 自 動 車 研 究 所 ITS 研 究 部 が 事 務 局 と な り
「ITS 統 合 シ ミ ュ レ ー シ ョ ン 環 境 構 築 検 討 委 員 会 ( 委 員 長 : 東 野 輝 夫 大 阪 大 学 教 授 、副 委 員 長 岩 井 誠 人 同 志 社 大 学 準 教 授 )」を 設 立 し 、学 識 経 験 者 お よ び メ ー カ の 協 力 を 得 な が ら 検 討 を 進 め た 。 こ こ に 関 係 各 位 に お 礼 申 し 上 げ る 次 第 で あ る 。
平 成 22 年 3 月
財 団 法 人 日 本 自 動 車 研 究 所
は じ め に
「 安 全 運 転 支 援 シ ス テ ム の 統 合 シ ミ ュ レ ー タ に 関 す る フ ィ ー ジ ビ リ テ ィ ス タ デ ィ 」 は 財 団 法 人 機 械 シ ス テ ム 振 興 協 会 か ら の 平 成 21 年 度 委 託 事 業 と し て 実 施 し た も の で あ る 。本 F/S で は 平 成 20 年 度 に 同 協 会 か ら 委 託 さ れ た「 安 全 運 転 支 援 シ ス テ ム の 通 信 系 シ ミ ュ レ ー タ に 関 す る フ ィ ー ジ ビ リ テ ィ ス タ デ ィ 」 の 成 果 を も と に 、 安 全 運 転 支 援 シ ス テ ム を 対 象 と し た 統 合 シ ミ ュ レ ー シ ョ ン 環 境 を 試 み た も の で あ る 。
安 全 運 転 の 実 現 は ITSの 主 要 な 目 的 の 一 つ で あ る 。 現 在 、 日 本 の み な ら ず 欧 州 、 米 国 に お い て 通 信 を 用 い た 安 全 運 転 支 援 シ ス テ ム の 検 討 が 行 わ れ て い る 。 こ う し た 通 信 を 用 い た 運 転 支 援 シ ス テ ム が 有 効 に 機 能 す る か ど う か を 確 認 す る た め 、 こ れ ま で 世 界 各 国 で 様 々 な 実 証 実 験 が 行 わ れ て き た 。 し か し 、 テ ス ト コ ー ス あ る い は 実 際 の 道 路 に お い て 車 両 を 用 い て シ ス テ ム の 有 効 性 を 確 認 す る こ と は 費 用 が か か る こ と に 加 え 、様 々 な 実 験 上 の 制 約 に よ り 限 定 さ れ た 成 果 し か 得 る こ と し か で き な か っ た 。 計 算 機 に よ る シ ミ ュ レ ー シ ョ ン に よ っ て シ ス テ ム の 動 作 を 予 測 し 実 験 の 結 果 を 補 完 す る 、 あ る い は シ ス テ ム 開 発 の 初 期 段 階 に そ の 効 果 の 見 通 し を つ け る 試 み に つ い て は 、 既 に 様 々 な 機 関 が 研 究 を 行 い 、 成 果 も 発 表 さ れ て い る 。 し か し 、 安 全 運 転 支 援 と い う 、 地 形 や 交 通 流 、 情 報 提 供 の 仕 方 、 車 両 の 運 転 者 の 行 動 と い う 要 素 が 相 互 に 絡 み 合 っ た 現 象 を 表 現 す る た め に は 、 そ れ ぞ れ の 事 象 を 妥 当 に 表 現 す る の み な ら ず 、 事 象 間 の 相 互 作 用 も 統 一 的 に 扱 う 必 要 が あ り 、 こ れ ま で そ う し た 総 合 的 な 研 究 実 施 例 は 海 外 も 含 め て ほ と ん ど な か っ た 。
本 報 告 は 、 こ れ ま で に 個 別 に 開 発 さ れ て き た 交 通 流 、 情 報 提 供 、 運 転 者 の 行 動 に つ い て の シ ミ ュ レ ー タ を 統 合 し 、 安 全 運 転 支 援 シ ス テ ム 全 体 の 動 作 を 計 算 機 上 で 予 測 す る 試 み に 関 わ る も の で あ る 。
対 象 分 野 の 異 な る そ れ ぞ れ の シ ミ ュ レ ー タ を ど の よ う に 統 合 し 、 動 作 の 検 証 を ど の よ う に 実 施 し て い っ た か に つ い て 本 報 告 が 述 べ る 検 討 内 容 は 、 今 後 の ITS の 様 々 な 分 野 で の 統 合 的 な シ ミ ュ レ ー タ の 開 発 や 利 用 に 役 立 つ も の と 考 え る 。
本 F/S 実 施 に あ た っ て は 、 財 団 法 人 日 本 自 動 車 研 究 所 ITS 研 究 部 が 事 務 局 と な り
「ITS 統 合 シ ミ ュ レ ー シ ョ ン 環 境 構 築 検 討 委 員 会 ( 委 員 長 : 東 野 輝 夫 大 阪 大 学 教 授 、副 委 員 長 岩 井 誠 人 同 志 社 大 学 準 教 授 )」を 設 立 し 、学 識 経 験 者 お よ び メ ー カ の 協 力 を 得 な が ら 検 討 を 進 め た 。 こ こ に 関 係 各 位 に お 礼 申 し 上 げ る 次 第 で あ る 。
平 成 22 年 3 月
財 団 法 人 日 本 自 動 車 研 究 所
目 次
序
はじめに
1.F/S の目的
... 12.F/S の実施体制
... 23.F/S の内容
... 53.1 研究の背景と目的 ... 5
3.2 統合シミュレーション環境構築のステップ ... 5
3.2.1 統合シミュレーション環境構築の進め方 ... 5
3.2.2 統合の第一段階(Phase 1):統合環境の実現と課題の抽出 ... 6
3.2.3 統合の第二段階(Phase 2):統合の最適化 ... 7
3.3 既存ツール/シナリオの統合(Phase 1) ... 8
3.3.1 通信シミュレータScenargie ... 8
3.3.2 交通流シミュレータMATES ... 8
3.3.3 Fast Urban Propagation Module(FUPM) ... 11
3.3.4 統合シミュレーションプラットフォーム ... 12
3.3.5 評価のための統合シミュレーション環境の構成 ... 13
3.3.6 統合化のシナリオと評価 ... 13
3.3.7 まとめ ... 16
3.4 シミュレーション環境の最適化(Phase2) ... 16
3.4.1 見通し計算モデルと運転行動モデルとの連携 ... 16
3.4.2 電波伝搬モデルについて ... 17
3.4.3 シミュレーションの密結合化 ... 18
3.5 フィールド実験データによる検証 ... 19
3.5.1 検証用計測データの選定 ... 19
3.5.2 実証実験データとシミュレーション結果との比較 ... 20
3.5.3 まとめ ... 21
3.6 総合実行性能評価 ... 22
3.6.1 統合環境の機能比較 ... 22
3.6.2 基本シナリオ ... 23
3.6.3 シミュレータの実行時間の比較 ... 23
3.6.4 運転行動モデルと交通流・通信シミュレータとの連携動作 ... 24
3.7 まとめ ... 26
4.F/S の今後の課題および展開
... 281 . F/S の目的
1.1 背景、必要性
ITS(Intelligent Transport Systems:高度道路交通システム)は、最先端の情報通信技術を 活用して、人と道路と車両を一体のシステムとして構築し、道路交通の安全性、輸送効率、
快適性の飛躍的な向上を実現するものとして世界的に開発や実用展開が進められている。
特に、道路交通の安全性の向上については、国内において政府が主導する「IT新改革戦略」
で取り上げられ、「世界一安全な道路交通社会」を目指した安全運転支援システムの実用化 に向けた取り組みが官民の協力のもとで進められている。また欧米においても ITSを用い た安全運転支援システムが検討されており、日欧米がほぼ同時期にこうしたシステムのフ ィールド実証実験を計画している。
このような路車間通信や車車間通信を用いた安全運転支援システムでは、移動環境にお ける情報伝達によってドライバの注意を喚起し、ドライバの不注意や反応遅れを防ぐこと が行われる。様々な交通環境下で、どの程度こうした安全運転支援システムが有効である かを予測するには通信による情報提供と情報に対するドライバの反応、そしてその結果と して起こる交通流の変化を同時にシミュレートすることが有効と考えられ、これらを統合 的に評価できるシミュレータの構築が期待されている。
1.2 目的
平成 20年度のF/Sで評価した通信系シミュレータ(Scenargie)をもとに、情報通信、交 通流、ドライバの運転行動などの複数のシミュレータを統合し、安全運転支援システムの 動作を総合的にシミュレートする環境の構築を試み、実用化に向けた課題を整理する。
2 . F/S の実施体制
財団法人 機械システム振興協会内に「総合システム調査開発委員会」を、財団法人 日 本自動車研究所内に「ITS統合シミュレータ環境構築検討委員会」を設立し、学識経験者を 中心に検討を進めた(平成20年度に設置したITS通信系シミュレータ機能検討委員会を改 組)。
具体的には、インタフェースの作成などシミュレータの統合化作業、および高速計算の 検討などは専門技術を有する外注に依頼して実施した。動作確認のためのシナリオ策定、
結果の評価は財団法人日本自動車研究所が実施し、その結果を上記委員会に報告しながら 作業を進めた。
図2-1 実施体制
(財)日本自動車研究所 ITS統合シミュレータ環境構築検討委員会
(株)スペースタイムエンジニアリング
外注
(財)機械システム振興協会 総合システム調査開発委員会
委託
総合システム調査開発委員会 委員名簿
(順不同・敬称略)
委員 長 東京大学 名誉教授 藤 正 巖
委 員 埼玉大学 総合研究機 構 教授 太 田 公 廣
委 員 独立行政法 人産業技術 総合研究所
エレクトロニクス研究部門 研究部門長 金 丸 正 剛
委 員 独立行政法 人産業技術 総合研究所
デジタルも のづくり研 究センター 招聘研究 員 志 村 洋 文 委 員 早稲田大学 研究戦略 センター 教授 中 島 一 郎
委 員 東京工業大 学大学院 総合理工学 研究科
教授 廣 田 薫
委 員 東京大学大 学院 工学 系研究科 准教授 藤 岡 健 彦
ITS 統合シミュレータ環境構築検討委員会 委員名簿
委員長 大阪大学 大学院 情報科学研究科情報ネットワーク学専攻 教授 東 野 輝 夫
副委員長 同志社大学 理工学部 電子工学科 准教授 岩 井 誠 人
委 員 神戸大学 大学院 工学研究科 情報知能学専攻 准教授 太 田 能
委 員 電気通信大学 先端ワイヤレスコミュニケーション研究センター(AWCC)
教授 山 尾 泰
委 員 慶應義塾大学 理工学部 情報工学科 准教授 重 野 寛
委 員 関東学院大学 工学部 情報ネット・メディア工学科 教授 水 井 潔
委 員 芝浦工業大学 システム理工学部 機械制御システム学科 教授 古 川 修
委 員 名城大学 理工学部 情報工学科 教授 津 川 定 之
委 員 早稲田大学 理工学術院 基幹理工学部 情報理工学科
木村研究室 客員准教授 高 井 峰 生
委 員 早稲田大学 理工学術院 准教授 木 村 啓 二
委 員 東京大学 人工物工学研究センター
価値創生イニシアティブ 特任助教 藤 井 秀 樹
委 員 株式会社トヨタIT開発センター 研究開発部
ネットワーク技術グループ グループリーダ 吉 岡 顕
委 員 財団法人道路新産業開発機構 ITS・新道路創生本部
調査役 飯 田 良 ニ
委 員 株式会社アイ・トランスポート・ラボ 花 房 比佐友
委 員 株式会社国際電気通信基礎技術研究所 適応コミュニケーション研究所
スマートネットワーク研究室 主任研究員 四 方 博 之
委 員 株式会社スペースタイムエンジニアリング 代表取締役社長 大和田 泰伯
事務局 (財)日本自動車研究所 ITSセンター標準化グループ主席研究員 関 馨
事務局 (財)日本自動車研究所 ITSセンター企画・研究グループ主任研究員 國 弘 由 比
3 . F/S の内容
3.1 研究の背景と目的
現在のシミュレーションでは、交通流シミュレータ、電波伝搬シミュレータ、通信シス テムシミュレータなど、それぞれの専用のシミュレータは数多く存在するが、それらを総 合して、実際に自動車が走行している実環境に近い状態での電波伝搬・通信(OSI 参照モ デルの物理層~アプリケーション層)の評価を行う環境はまだ整備されていないのが現状 である。
安全運転支援のアプリケーションが有効に働いたかどうかを評価するためには、個々の 運転者の行動にまで踏み込んで評価できることが望ましい。そのためには、交通流のみな らず、ドライバひとりひとりの行動までシミュレーションできるような環境が求められる。
そこで、本報告では、安全運転支援のためのアプリケーションを評価可能なシミュレー タとして、交通流シミュレータ、電波伝搬シミュレータ、通信シミュレータ、安全運転支 援アプリケーション、そして運転者の認知・判断・行動モデルの全てを統合してシミュレ ーションを行える環境の構築を目的とし、実際にこれらのシミュレータの構築を通して、
シミュレーションのパフォーマンスに関する課題や構築上の課題などを明確化する。
3.2 統合シミュレーション環境構築のステップ
3.2.1 統合シミュレーション環境構築の進め方本 F/Sは安全運転支援のためのアプリケーションの評価環境構築のために、交通流シミ ュレータ、通信シミュレータ、安全運転支援の通信アプリケーションモデル、電波伝搬モ デル、運転行動モデルの統合を行い、その実現可能性を検証することを目標とする。
まず統合シミュレータ構築の第一段階(Phase1)として、環境構築の実現可能性検証と、
実際に構築する上での問題点やパフォーマンスに関する問題点などを明確化し、次段階に 向けた最適化の方向付けを行うための試作を、既存のシミュレータを統合することで実施 する。この第一段階では、既存の使用可能なツールを駆使し、早い段階で統合・動作する 試作を構築することを目標とする。
次に、第二段階(Phase2)として、第一段階にて構築した統合シミュレーション環境で 蓄積したノウハウやパフォーマンスに関するボトルネックなどを考慮した上で、統合シミ ュレータの最適化を図る。また、2009 年に総務省にて行われた大規模実証実験におけるパ ケット受信率や受信電界強度などの実測データをもとに、大規模実験環境と同様の環境を シミュレータ内に構築し、シミュレーションによるパケットレベルでの受信特性結果と実
測データとの比較や、電波伝搬モデルと実測受信電界強度との特性比較なども行う。最終 的に、統合シミュレータ構築に関する課題やスケーラビリティに関する課題、実測データ との比較による結果の有効性に関する課題などを明らかにする(図 3-1)。
図 3-1 統合シミュレータ構築までの流れ
3.2.2 統合の第一段階(Phase 1):統合環境の実現と課題の抽出
第一段階(Phase 1)では既存ソフトウェアを最大限に活用することにより、車車間通信 システムを総合的にシミュレーションできる環境をなるべく早く構築することを目的とす る。そのため、既存のソフトウェアのうち、次のソフトウェアを利用して統合環境を構築 する。
① Scenargie Base Simulator / Dot Eleven Module 通信システムシミュレータ
② MATES
東京大学で開発されたオープンソースの交通流シミュレータ ③ (Scenargie)Fast Urban Propagation Module
高速レイトレーシング電波伝搬ライブラリ
④ Integrated Simulation Platform(統合シミュレーションプラットフォーム)
通信システムシミュレータ、交通流シミュレータ、アプリケーションシミュレータを 統合して動作させるためのシミュレーションプラットフォーム
既存シミュレータの統合
性 能 評 価 、 プ ロ フ ァ イ リ ン
設計の最適化・
高速化
実測データの活用 結果の比較
Phase 1
Phase 2
実用化へ向けた課題の明確化 既存の通信、交通流、アプ
リケーション、運転行動モ デル運転行動モデルの各シ ミュレータを統合
統 合 し た シ ミ ュ レ ー シ ョ ン環境の性能を評価し、課 題を洗い出す
課 題 を 考 慮 し た 上 で 再 設 計・開発を行い、性能向上 を図る
実 証 実 験 に よ る 実 測 デ ー タを活用し、実測値にもと づ く シ ミ ュ レ ー シ ョ ン の 実現と、その結果の実測値 との比較を行う
統合・性能評
価
⑤ (Scenargie)External Simulator Connecting Module
外部シミュレータと Scenargieを連携して動作させるための接続モジュール
⑥ (Scenargie)Trace Analyzer Scenargieのイベント情報や出力結果を効率的に解析する ためのソフトウェア
また、次のモデルおよびシナリオを計算機内に構築する。
⑦ UDM (Universal Driver Model)
芝浦工業大学の古川修教授が考案した運転者の行動モデル ⑧ 安全運転支援アプリケーション
近傍の車両の位置を通信により交換し、運転者に衝突回避行動を促す。
⑨ シミュレーションシナリオ
建物などを配置して見通しの悪い交差点を作成し、前述の安全アプリケーションが動 作しない場合は衝突事故が起こるように車両の発生頻度とタイミングを調整するシナ リオ
統合環境構築の第一段階では具体的に次のことを行う。
(1) 安全運転支援アプリケーションの作成
車両の位置情報交換、ブレーキ、右左折などの情報をブロードキャストで交換するアプ リケーションモデルの作成を行う。
(2) MATESへの UDM基本機能組み込み作業
交通流シミュレータ MATESへUDMの基本となる機能の組込み作業を行う。
(3) 電波伝搬ライブラリを用いた見通し計算と UDMとの連携部作成
レイトレーシングの電波伝搬ライブラリを見通し計算に利用し、これを UDM と連携し て利用するためのインタフェースを作成する。
(4) シミュレーションシナリオおよび地図の作成
見通しの悪い交差点での衝突事故が発生する環境を作るために、地図データ、建物デー タ、アプリケーション、車両の発生頻度などを調整し、シミュレーションシナリオを作成 する。
(5) シミュレーション実行・解析作業
作成したシナリオでシミュレーションを実行し結果の解析を行う。
3.2.3 統合の第二段階(Phase 2):統合の最適化
第二段階(Phase 2)では第一段階(Phase 1)の実行性能解析にもとづき、統合シミュレ ータの実行性能最適化を行う。
第二段階にて行う内容は具体的に次の 5つである。
(1) MATESへの UDM組み込み作業
第一段階の UDM を、見通し計算ライブラリやアプリケーションと連携して動作するよ う拡張する。
(2) シミュレータ間の連携インタフェースの最適化作業
Scenargieが直接外部シミュレータと連携し、全体の実行性能を最適化する。
(3) 見通し計算ライブラリの構築
独自に見通し計算ライブラリを構築し、見通し計算の高速化を図る。
(4) 実験データにもとづく電波伝搬モデルの作成
実証実験の統計データにもとづく電波伝搬モデルを作成する。
(5) シミュレーション実行・解析・実験データとの検証作業
開発した統合シミュレータ環境、およびシナリオを用いてシミュレーションを実行し、
実験データとの検証作業を行う。
3.3 既存ツール/シナリオの統合(Phase 1)
3.3.1 通信シミュレータ Scenargie
今回統合する通信シミュレータとして、Scenargieを利用する。今回の統合シミュレーシ ョン環境構築に Scenargieを採用したのは、平成 20年度に行われた、「安全運転支援システ ムの通信系シミュレータに関するフィージビリティスタディ」にて、ITS シミュレーショ ンへの適応度・スケーラビリティ・拡張性などを定性的・定量的に評価し、その中で最も ITSの通信シミュレーションへ適していたためである。
3.3.2 交通流シミュレータ MATES (1) MATESの概要
MATESは一般に微視的交通流シミュレータに分類される。マルチエージェントモデルを
採用しており、個々の車両はそれぞれ 1つのエージェントとして実装されている。車両エ ー ジ ェ ン ト は 自 身 の 周 囲 か ら 情 報 を 取 得 し 、 自 律 的 に 行 動 す る よ う に 設 計 さ れ て い る 。
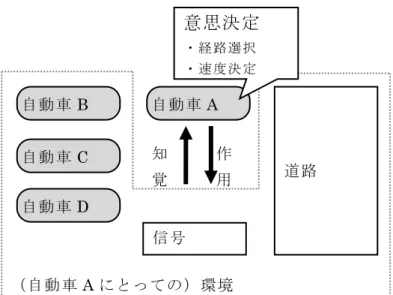
MATES におけるエージェントとそれを取り巻く環境の定義を図 3-2 に示す。図において,
車両エージェント Aに着目した場合、他の全てのエージェント群は車両エージェントA の 環境に含まれる。一方で車両 Bに着目すると車両A が環境の一部となるため、環境を介し た相互作用が発生する。このような相互作用の総和によって複雑な交通流が創発される。
図3-2 MATESにおけるエージェントと環境の定義
(2) UDM概要
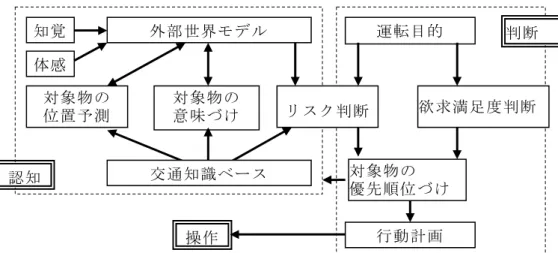
様々な走行条件、自動車の仕様、道路条件、安全運転支援システムに対応できる普遍的 なドライバの行動を模擬するために開発されたモデルが UDMである。UDMでは、認知部 と判断部の橋渡しの際に外部世界モデルを構築し、外部環境の情報を蓄える。UDM にお いて、認知エラーは外部環境の情報を外部世界モデルに反映させる際に発生するコピーエ ラーとして表現され、判断エラーは外部世界モデルを参照する際の精度の悪さによって表 現される。操作エラーを含め、エラーは確率的に発生するものとされ、発生したエラーの 積み重ねによって交通事故が再現される。
図 3-3にUDMの基本アーキテクチャを示す。
自動車 A 自動車B
自動車C
自動車D
信号 知 道路 覚
作 用
意思決定
・経路選択
・速度決定
(自動車Aにとっての)環境
自動車A 自動車 B
自動車C
自動車 D 信号
道路 知
覚
作 用
(自動車Bにとっての)環境
意思決定
・経路選択
・速度決定
図3-3 UDMの基本アーキテクチャ
(3) MATESへの簡易的なUDMの実装
今年度の F/Sにおいては特に見通し不良を中心とした認知エラーについて考慮するもの とする。従来の MATES は他の交通流シミュレータと同様、ドライバの情報取得に制限が な く 、 ド ラ イ バ の エ ラ ー を 原 因 と す る 交 通 事 故 は 発 生 し な い 。 こ の 点 を 改 善 す る た め 、
MATESのドライバモデルに簡易 UDMを追加で実装する。
本 F/Sで実装する簡易UDMは認知エラーに特化したモデルであり、オリジナルのUDM とは以下の点で異なる。
① 認知エラーを外部から与える ② 視線移動はモデル化しない
③ 外部世界モデルの将来予測は行わない ④ 判断エラーは考慮しない
(4) 見通し計算結果の参照
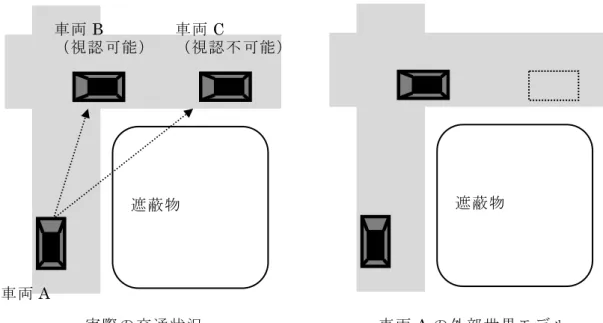
交差点に進入する他車の認知については、後述する見通し計算の結果を参照することも 可能である。情報を取得すべき車両 1台1台の可視判定結果を受け取り、視認不可能と判 定された車両は外部世界モデルにコピーしない(図 3-4)。従って、視認不可能の車両の存 在が挙動決定に影響を及ぼすことはない。現実のドライバは見通しの悪い交差点に進入す る際は危険予測運転を行うはずであるが、今回は考慮しない。
知覚 体感
外部世界モデル
対象物の
位置予測 対象物の
意味づけ リスク判断
運転目的
欲求満足度判断
対象物の 優先順位づけ
行動計画 操作
認知
判断
交通知識ベース
図 3-4 見通し計算結果を参照した外部世界モデル
3.3.3 Fast Urban Propagation Module(FUPM)
Fast Urban Propagation Module (以降FUPMと呼ぶ)は、決定論的な電波伝搬計算ライ
ブラリの 1 つであり、3 次元の建物データ、および移動する遮蔽物データを入力として与 えることで、それらの遮蔽や、遮蔽物による電波の回折を考慮した電波伝搬計算を行うラ イブラリである。3 次元建物データは、一般的に広く利用されている GIS(地理情報シス テム)データのフォーマットである shape ファイル形式をサポートしており、市販されて いるデータをそのまま読み込んで利用することが可能である。
FUPM では、いくつかの電波伝搬モデルを選択して利用可能であるが、今回利用する建 物を考慮した電波伝搬モデル(TPGEODESIC)では、移動体オブジェクトを考慮した伝搬 計算を高速に行うことを目的として設計された電波伝搬計算モジュールであるため、レイ トレーシング法における建物の反射および回折を考慮した電波伝搬計算のうち、反射の計 算を省略している。TPGEODESICではさらに、回折の計算も、送受信点を含む垂直面上で の回折、および垂直面と直行する平面上での回折のみ計算を行っている(図 3-5)。これら の簡略化により、電波伝搬の計算を高速に行うことが可能となっており、しかも、建物や 移動体オブジェクトによる電波の遮蔽の影響も考慮した電波伝搬結果が得られる。シミュ レータの統合の第一段階では、FUPM(TPGEODESIC)を電波伝搬モデルとして利用し、
シミュレーションを行うものとする。
遮蔽物
車両A 車両 B
(視認可能) 車両C
(視認不可能)
遮蔽物
実際の交通状況 車両Aの外部世界モデル
図 3-5 Fast Urban Propagation Module(TPGEODESIC)で考慮している回折の方向
3.3.4 統合シミュレーションプラットフォーム
統合シミュレーションプラットフォームは、多種多様なシミュレーションツールを統合 して、時刻同期をとりながらシミュレーションを行うためのプラットフォームである。具 体的には、位置測位シミュレータ、アプリケーションシミュレータ、交通流シミュレータ、
ネットワーク(通信)シミュレータ、および、それらのプロセスを統合して管理するため のシミュレーションプロセスマネージャ、データを管理するシミュレーションデータマネ ージャから構成される。統合シミュレーションプラットフォームの概要を図 3-6に示す。
図3-6 統合シミュレーションプラットフォーム概要
送信点
受信点
FUPM(TPGEODESIC)では、縦、横方向からの電波の回折を計算
シミュレーション プロセスマネージャ 通信シミュレータ
交通流シミュレータ
位置測位
シミュレータ
ア プ リ ケ ー シ ョ ン シミュレータ シ ミ ュ レ ー シ ョ ン
データマネージャ
移動測位状態
受信情報 位置情報
位置情報
受信情報
移動測位情報 アプリケーションイベント
位置情報
3.3.5 評価のための統合シミュレーション環境の構成
今回,統合シミュレーションプラットフォーム上で統合するシミュレータを示す。
① 通信シミュレータ:Scenarige ② 交通流シミュレータ:MATES
③ アプリケーションシミュレータ:ASV 安全運転支援アプリケーション準拠(統合シ ミュレーションプラットフォームに搭載)
④ トラフィックシミュレータ:CBR ブロードキャスト(統合シミュレーションプラッ トフォームに搭載)
⑤ 電波伝搬モデル:Fast Urban Propagation Module(FUPM)
3.3.6 統合化のシナリオと評価
統合シミュレーションプラットフォームに ScenargieやMATESを統合し、実際にシミュ レーション評価を行う。評価には以下の 2つのシナリオを用いる。
A:単一十字路交差点におけるシナリオ
信号のある十字路交差点において、車両がそれぞれ信号に従って走行、停止を行うシナ リオである。ただし、交差点の一つ角に構造物を配置し、その構造物によって車両間の見 通しが妨げられるようにしている。
B:市街地におけるシナリオ
市街地を模擬した地図データ(道路ネットワークデータ・および建物データ)を用いて、
比較的規模の大きいエリア上を信号に従い車両が移動するシナリオである。建物の数が多 いため、電波伝搬計算で扱う 3次元データ(ポリゴンデータ)も多くなり、計算量が増え ることが予想される。
この 2つのシナリオを用いて、次の評価項目に対して評価を行う。
① 1タイムステップを実行するのに必要なシミュレーション時間
② それぞれのシミュレーションモジュールの実行にかかった時間の内訳
③ 計算時の CPU使用率
【評価例】市街地におけるシナリオ(B)
シナリオ Bについての評価結果を例として示す。
市街地におけるシミュレーションエリアの概略を図 3-7に示す。
エリア:2500m×2500m
図3-7 シミュレーションエリアの概略
【市街地シナリオ評価結果例】
市街地におけるシナリオにおいても、交差点のシナリオと同様にシミュレーションを実 行し、シミュレーションエリア内の車両台数が定常状態に達した時点において、通信シミ ュレータの 1タイムステップの計算に要する時間を計測した。電波伝搬モデルについても 同様に、2 波モデルおよび FUPM(TPGEODESIC)の 2 パターンでシミュレーションを行 っている。
結果を表 3-1に示す。
表3-1 シミュレーション結果(市街地のシナリオ)
使用した電波伝搬モデル 1タイムステップあたりの実行時間 2波モデル 平均で約10 秒
FUPM(TPGEODESIC) 平均で約12 秒
2 波モデルでは、建物の数(ポリゴン数)によって計算時間は影響しないため、単純に エリア内にいる通信車両の数によってシミュレーション時間が決まってくる。交通流シミ ュレータにおいて定常状態時のエリア内の車両の数は、交差点のシナリオの場合と同じに なるように設定してあるため、2 波モデルの実行時間は交差点のシナリオとほぼ同一の値 となっている。FUPM の場合には、2 点間のパスロスを計算するのにかかる時間は建物の
数(ポリゴン数)によって大きく影響してくるため、交差点でのシミュレーションに比べ ると、FUPMでの1タイムステップあたりの実行時間が増加していることがわかる。
通信シミュレータにおける処理時間の内訳を図 3-8、図3-9に示す。
図3-8 シミュレーション時間の内訳(2波モデル)
図3-9 シミュレーション時間の内訳(FUPM)
図 3-8と図3-9を比較すると、まず、電波伝搬処理にかかった時間が、2波モデルに比べ FUPM では大きくなっていることが確認できる。また、シミュレーションプロセスマネー ジャへ送る統計情報送信時間が 2 波モデルに比べ FUPM は少なくなっている。これは、2 波モデルでは、建物などを考慮せずに同心円状に通信範囲が設定されるため、あるノード による送信フレームは一定の距離内にいるノードでは受信される確率が高い。一方、FUPM の場合には、建物の影に隠れている端末に対してはパケットが到達しないことが多いため、
全体的に見て、パケットの到達率は低くなっている。統合シミュレーションプラットフォ ームでは、1 タイムステップ内で受信したパケットの情報を全てシミュレーションプロセ スマネージャへ送るため、パケットの受診率が低い FUPMの方が送るべき情報量が少なく なり、ソケット通信にかかる時間が少なくなっている。データベースに出力するトレース 情報は、パケットの受信成功、失敗に関わらず、シミュレーション内で発生した全てのイ ベントを記録し、データベースへ出力するため、2 波モデル、FUPM ともにシミュレーシ ョンにかかる時間は変わらない結果となった。
0.3秒, 3%
3秒, 29%
7秒, 68%
電波伝搬計算・その他 DBへのトレース出力
シミュレーションプロセスマネージャ への統計情報送信
7秒, 58%
2.5秒, 21% 2.5秒, 21%
電波伝搬計算・その他 DBへのトレース出力
シミュレーションプロセスマネージャ への統計情報送信
3.3.7 まとめ
ここでは、第一段階(Phase1)として、既存のツールを可能な限り利用して統合シミュ レーション環境を早急に構築し、実効性能の評価や既存のツールの問題点を洗い出すこと を中心に調査を行った。
実行性能の評価では、データベース出力と、ソケット通信によるそれぞれのシミュレー タ間の情報交換部分がボトルネックとなっていることが明らかとなった。また、通信シミ ュレータとその他のプロセスとの CPUの使用率より、統合シミュレーションプラットフォ ームおよび交通流シミュレータの計算にかかる時間と通信シミュレータの計算にかかる時 間の割合を比較した。これにより、統合シミュレーション全体に占める通信シミュレータ の計算時間の割合は大きく、中でも電波伝搬の計算が複雑になるほど計算時間の割合が大 きくなることが明らかとなった。
統合シミュレーションプラットフォームを用いても、今回のボトルネックとなっている トレース情報のデータベースへの書き込み、およびシミュレーションプロセスマネージャ への統計情報の送信を行わなければ、比較的早く動作するが、トレースデータを出力しな い場合には、シミュレーション中に起こった現象を確認、解析することができなくなり、
さらに、フレームの受信情報をシミュレーションプロセスマネージャへ送らない場合には、
見通し外でも電波が届くことによって接近車両に気づき、減速する、といった交通流シミ ュレータと通信シミュレータの一連の連携した動作がそもそも行えなくなってしまう。
よって、第二段階(Phase2)では、これらのボトルネックとなっている部分を最適化す ることで、より大規模な環境においても高速に動作する統合シミュレーション環境の構築 を行う。
3.4 シミュレーション環境の最適化(Phase2)
3.4.1 見通し計算モデルと運転行動モデルとの連携
見通し計算ライブラリでは、地図データの標準的なフォーマットである shape ファイル 形式を読み込み、shape ファイルに記述されている 3 次元データ構造をシミュレータ内部 に構築し、任意の 2点を与えた時に、その 2点間を結ぶ線分が建物の壁面を通過するかど うかを幾何学的に計算を行う。この時に、建物データの保持構造に 4分木構造を用いるこ とで、建物の壁面ポリゴンデータを探索する時間の短縮を図り、計算時間の大幅な削減と マルチプロセッサによる計算の並列化を行った際の計算最適化を図っている。
見通し計算による視認性判定を実際に利用するのは「運転行動モデル処理」である。こ の処理では車両ごとにドライバの認知および判断処理を行っており、これらの車両ごとに 見通し計算を行っていてはオーバーヘッドが大きくなってしまう。そのため、見通し計算
そのものに関しては予め処理したうえで送受信端となる車両ペアごとに情報を管理し、交 通流シミュレーションのドライバ認知部においては、その見通し計算結果を使用するのみ の設計することが望ましい。また、見通し計算は交通流シミュレーションの 1シミュレー ションステップにおいて、車両の増減が確定した後に行う必要がある。
3.4.2 電波伝搬モデルについて
3.3.3節で述べた FUPMでは、建物や車両を考慮した様々なシミュレーションが比較的高
速に行えることを示した。しかし、統合シミュレーション環境(Phase1)おいて電波伝搬 の計算時間が占める割合は比較的大きくモデルの最適化を行う余地がある。そこで、本 F/S では FUPMなどのレイトレーシングを行うモデルではなく、より高速な解析的なモデルの 利用可能性について検討した。具体的には、以下に示す手順で検討を実施した。
① 対象シナリオ、計測データの選定 ② 電波伝搬モデルの構築
③ 実証実験結果との比較
解析的なモデルとして開発したナイフエッジモデルを利用した電波伝搬モデルを統合シ ミ ュ レ ー シ ョ ン 環 境 に 組 み 込 み 、1 つ 角 交 差 点 に お け る RSSI(Receive Signal Strength Indicator)の値について実証実験による計測データとの比較を行った。統合シミュレーシ ョン環境では、実証実験の諸元に従い同等パラメータを設定した上でシミュレーションを 行った。図 3-10に比較結果を示す。
図 3-10 実証実験による計測データとナイフエッジ回折モデルによる RSSIの比較
-90 -80 -70 -60 -50 -40 -30 -20
-50.0 0.0 50.0 100.0 150.0 200.0
交差点からの距離 [m]
RSSI [dBm]
計測データ ナイフエッジモデル
図 3-10 のグラフが示すように、交差点からの比較的近い場所(約 25m 以内)では、実 証実験による計測データはナイフエッジ回折モデルで比較的よく近似できることが確認で きる。また、計測データとナイフエッジ回折モデルによる相関係数は 0.96となった。25m
~50m 以上になると、計測データに比べナイフエッジ回折モデルによる RSSI のほうが最 大 10dB程度低くなっている。これは、実証実験における遮蔽物の高さが 2.438mであり横
方向に13.4m大きさのため障害物の上からの回折波や反射波の影響がありモデル式で求め
た RSSIより実際は値が大きいことなどが考えられる。
3.4.3 シミュレーションの密結合化
統合シミュレーションプラットフォームを用いた統合方法では、タイムステップ毎に全 車両の統計情報をシミュレーションプロセスマネージャとソケットを介して情報共有を行 う必要があり、このソケット通信でやり取りする情報量が車両台数が増えるにつれ、増大 する傾向があるため、大規模なシミュレーションを行う上でソケット通信部分がボトルネ ックになりうることがわかった。また、ソケット通信にてやり取りする情報は、予め定義 されたパケットフォーマットにてやり取りされるため、機能の拡張などで設計時に想定さ れていない情報交換が必要となる場合には、ソケットではなくデータベースを介してデー タを共有することとなる。データベースアクセスは、ソケット通信に比べても低速である ことから、高速化を行う上でデータベースを用いたシミュレーション間の情報共有は避け るべきであると言える。
そこで、シミュレータ間の情報共有のインタフェースを見直し、交通流シミュレータ、
ネットワークシミュレータ、アプリケーションシミュレータなど全てのシミュレータバイ ナリを直接リンクしてしまい、全てのシミュレータがメモリ空間を共有し、必要な情報に 直接メモリを参照することでアクセスできるよう密に結合することを考える。これにより、
数千台の規模のシミュレーションであっても実時間内に計算可能な統合シミュレータの実 現を図る。
密な結合を行うためには、次の事項を考慮する必要がある。
① イベントスケジューラの統合と、時刻同期 ② ノードの生成と消滅の管理
③ アプリケーション・トラフィックジェネレータの統合
蜜結合後の統合シミュレーション環境の機能ブロックを図 3-11に示す。
今回行った統合シミュレータの密結合は、シミュレータ自体にはあまり手を加えず、そ のままの形でそれぞれのシミュレータモジュールを 1つのバイナリとしてリンクし動作さ せることに重点をおいた。そのため、ScenargieやMATES で使用している内部のデータ構 造にはあまり手を加えておらず、車両位置、建物や車両などの形状(ポリゴン)データな どは、それぞれの中で管理している。車両の位置情報だけは、100ms 毎に同期を取ってい る。
図 3-11 密結合後の機能ブロック
3.5 フィールド実験データによる検証
3.5.1 検証用計測データの選定
本節でも、大規模実証実験による 1つ角交差点における出会い頭衝突回避シーンの計測 データをシステムモデルの検証に利用した。本節では、3.4.2節で検証を行った1対1通信 実験における計測データ(RSSI)を利用したた伝播モデルを構築した上で、パケット到達 率について、N対Nの通信実験の結果と構築したモデルを用いたシミュレーション結果と の比較を行った。
以下に、N 対 N 通信実験の各種諸元を示す。図 3-12 は、N 対 N 通信実験における車両 の配置構成を示している。
見 通 し 計 算 ラ イ ブ ラ リ( 早 稲 田 大 学 )
通 信 イ ベ ン ト
(Scenargie RC006) アプリケーション
イベント
電 波 伝 搬 計 算 (TwoRay/FUPM/統 計 モ デ ル + 実 測 値 補 正 )
Scenargie 離 散 事 象 イ ベ ン ト ス ケ ジ ュ ー ラ 簡易UDM拡張
Scenargie
RDBMS ト レ ー ス デ ー タ お よ び
統 計 デ ー タ 出 力 MATES車 両 位 置 計 算 モ ジ ュ ー ル(東 京 大 学)
入 力 デ ー タ
イ ベ ン ト の ス ケ ジ ュ ー ル お よ び イ ベ ン ト 実 行 100ms毎 に イ ベ ン ト 登 録 ・ 実 行
Scenargie 通 信 機 位 置
報(n) MATE
GISデ ー タ
車 両 位 置 GISデ ー タ
MATE タ イ ム ス テ ッ プ:n
タ イ ム ス テ ッ プ:n-1
100ms毎 に 同 期
通信コンフィグレーション アプリケーション 道路網,交差点データ 建物データなど
干渉車 パケッ 車両は、
ように設 ミリ秒よ 本報告 シナリオ
3.5.2
3.4.2 オに従っ るパケッ った。図
車両は、他 トを送信す
、アッテネー 設定されて より短い間 告書では、
オ(シナリ
実証実験デ
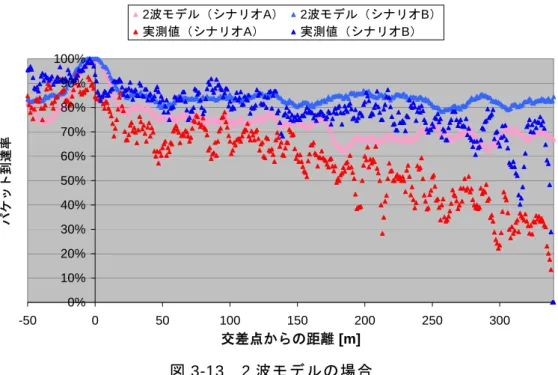
節で述べた ったN 対 N ット到達率 図3-13は、
図 3-1
の車両が1 ることで、
ータによっ いる。さら 隔でパケッ 表 3-2 に示 オB)の2
シナリオA シナリオB
データとシ
た電波伝搬モ
N 通信のシ
について、
電波伝搬モ
12 N対N
00 ミリ秒に
複数台の車 て送信電力 に、多数の ットを送信す 示すように、
とおりの場
表3-2 干渉 A
B
ミュレーシ
モデルを利 ミュレーシ 実証実験に モデルとして
通信実験に
に1回パケ 車両を模擬 力を制御し R
隠れ端末を する。
高負荷時の 場合における
トラフィッ 渉車両台数
203台 101台
ション結果
用して、3.
ションを実施 による計測結
て 2波モデ
における車両
ットを送信 し干渉元と
Rxにおいて
を模擬するた
のシナリオ る評価を実施
クパタン 隠れ端末
67 50
との比較
5.1 節で述
施した。注目 結果とシミ デルを利用し
両配置
するのに対 して振舞う て Txと隠れ ために、干渉
(シナリオ 施した。
末車両台数 7台 0台
べたシミュ 目している
ュレーショ した場合を示
対しより短い う。また、隠 れ端末の関係 渉車両と同様
オ A)と低負
ュレーション Txから Rx ョン結果の比
示している。
い間隔で 隠れ端末 係になる 様に100
負荷時の
ンシナリ
x に対す
比較を行
。
図3-13 2波モデルの場合
この例の場合,相関係数は、シナリオ A で 0.67、シナリオ Bで 0.39 となった。低負荷 時に交差点からの距離が比較的近い場合を除いて、計測データとの乖離が大きい。特に、
交差点からの距離が遠い場合も高負荷時、低負荷時ともにパケット到達率の低下はあまり 見られず、計測データとの乖離が大きくなることが確認できる。これは、遮蔽物の影響を 受けず距離によって伝播損失が決まるため、Rx において Tx からの RSSI が大きく見積も られ、その結果、本来受信できなパケットが受け取れていることによるものと考えられる。
なお、Tx-Rx間のRSSIを計算値ではなく実測値を用いると、パケット到達率の予測レ ベルは高くなることが示された。
3.5.3 まとめ
1 対1通信実験における RSSI の計測データ用いてN 対 N通信実験をシミュレーション で再現し、実際のパケット到達率と近い値をシミュレーションによって算出可能であるこ とを示した。これは開発した統合シミュレーション環境におけるシステムモデルが実機と 同等の動作をしていることを裏付けるものと言える。注目している TxRx 間のみに対して 計測データを利用したが、他のノードペアについても計測データを用意することができれ ばより精度の高いシミュレーションが行えることが期待できる。シミュレーションによる 評価は、車両台数や配置などを容易に変更することができる設定し模擬することができる ため、様々な環境での評価を比較的簡単に実施することができる。
今後シミュレーションによる評価環境を整備するにあたっては、より客観的な評価結果 となるように、様々な研究者や開発者間で共有できる共通の評価シナリオを整備し、同一 の評価指標に基づいてシステムの評価を行うことなどが求められると考える。
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
-50 0 50 100 150 200 250 300
交差点からの距離 [m]
パケット到達率
2波モデル(シナリオA) 2波モデル(シナリオB)
実測値(シナリオA) 実測値(シナリオB)
3.6 総合実行性能評価
3.6.1 統合環境の機能比較
今回、Phase1で作成した統合シミュレーションプラットフォームを用いた ITS統合シミ ュレータと、Phase2で作成した密結合統合シミュレータの 2つにおいて、実行性能の評価 を行う。
実効性能の評価を行うにあたり、Phase1の統合シミュレータとPhase2の密結合統合シミ ュレータにおける、機能実装の差異を比較する。
以下に、Phase 1 とPhase 2における統合シミュレータの機能比較を表3-3 に示す。
表 3-3 Phase1とPhase2における統合シミュレータの比較
Phase 1
(統合シミュレーション プラットフォーム利用)
Phase 2
(密結合統合シミュレータ)
統合の仕方 ソケット通信 直接リンク データの共有の仕方 ソケット通信
データベース
メモリ直接参照 イベントのトレース出力 デ ー タ ベ ー ス へ の 直 接 書 き
込み
・データベースへの直接書き 込み
・テキストファイルへの書き 出し
・バイナリ形式ファイルへの 書き出し
同時実行プロセス ・通信シミュレータ
・交通流シミュレータ
・アプリケーションシミュレ ータ
・位置測位シミュレータ
・シミュレーションプロセス マネージャ
・結合した統合シミュレータ のみ
時刻管理・同期 シ ミ ュ レ ー シ ョ ン プ ロ セ ス マ ネ ー ジ ャ が そ れ ぞ れ の プ ロセスの時刻を同期管理
Scenargie の イ ベ ン ト ス ケ ジ ューラが管理
電波伝搬モデル FUPM FUPM・2 波 モ デ ル ・ ナ イ フ エッジモデル
見通し計算ライブラリ FUPMの機能を利用 独 自 開 発 の 見 通 し 計 算 ラ イ ブラリ
運転行動モデル なし MATES内に組み込み
今回は、運転行動モデルの実装を Phase 2 の統合シミュレータへ向けて開発していたた め、Phase 1の実装への組み込みに至っていない。また、Phase 2の実装では、独自に開発 した見通し計算ライブラリを使用している。これにより、従来利用していた電波伝搬ライ ブラリである FUPMを用いた計算よりも、高速に 2点間の見通しの有無を判定できるもの と考えられる。
性能比較を行う上で、電波伝搬モデルは Phase 1でも使用したFUPMを用いて比較を行 う。また、比較を行う上で条件を同じにするために、Phase 2 の運転行動モデルの機能は OFFにした上で比較を行った。
3.6.2 基本シナリオ
まず、Phase1にて実行速度の評価を行った 2つの環境下において、どの程度の速度向上 が図れたかを調査するために、同一のシナリオを用いて Phase1、Phase2の両シミュレータ を動作させ、実行時間の比較を行う。今回使用するシナリオは、3.3節にて Phase1 の性能 評価を行う上で使用した、市街地のシナリオを利用した(図 3-14)。
エリア:2500m×2500m
図3-14 Phase1と Phase2の比較に用いるシナリオ
3.6.3 シミュレータの実行時間の比較
今回構築した統合シミュレータの実行性能を評価するにあたり、同一シナリオにてシミ ュレータの 1タイムステップに要する時間の評価を行った。
シミュレーション時間の比較結果を図 3-15に示す。
図3-15 Phase 1およびPhase 2の統合シミュレータにおける
1タイムステップあたりのシミュレーションにかかる時間の比較
図 3-15より、Phase 1にて統合シミュレーションフレームワークを用いて統合した環境 では、1タイムステップ(100ms)のシミュレーションを行うのにデータベースへトレース 出力した場合では 142秒ほどかかっていたのに対し、Phase 2にて統合した密結合の統合シ ミュレータでは、同じくデータベースへトレース出力した場合であっても53 秒とかなり高 速化できていることがわかる。Phase 1にてオーバーヘッドとされていたトレースのデータ ベース出力を、Phase 2の統合シミュレーション環境では、高速化を図るためテキストファ イルによる出力と、バイナリ形式のファイルフォーマットによる出力の 2パターン新たに 実装し、比較を行っている。テキストデータに比べ、バイナリ形式でのデータ出力の方が、
ファイルのサイズを小さくすることができることから、ディスクアクセスに伴う処理速度 の低下を極力少なくすることができ、また、テキストデータ出力時の整形処理が不要なこ とから大幅に 1タイムステップあたりの処理時間を短縮することができた。
トレースデータ出力によるボトルネックを除いた、密結合による統合化による高速化の 影響を比較するために、トレース出力を停止した状態でのシミュレーションも行った。こ の結果より、Phase 1ではトレースデータを出力しない状態であっても 1タイムステップあ たり 41 秒ほどかかっていたが、Phase 2 にて統合した密結合のシミュレータでは、1 タイ ムステップあたり約 0.5秒と、80 倍近いの高速化が図れていることを確認できた。
3.6.4 運転行動モデルと交通流・通信シミュレータとの連携動作
運転者の行動モデル、交通流シミュレータおよび通信シミュレータが連携して動作する ことで、事故が回避できる環境を構築するために、次のような優先道路における十字路交 差点のシナリオを構築した。
1タイムステップあたりのシミュレーション時間 (車両台数約350台)
0.506 0.7
2.63
53 41
142
0 20 40 60 80 100 120 140
Phase2 + No Trace Phase2 + Binary Trace Phase2 + Text Trace Phase2 + DB Trace Phase1 + No Trace Phase1+ DB Trace
シミュレーション時間(秒)
見通し計算ライブラリと運転行動モデルを交通流シミュレータ内で動作させ、見通し内 に車両が居ない場合には減速せずに交差点を直進するような運転行動モデルにし、シミュ レーションを行った。
シミュレーションにて、事故が発生した時のスナップショットを図 3-16に示す。
図3-16 交差点における事故発生時のスナップショット
図 3-16中の黒い部分が建物を配置した部分であり、建物越に見通しがないものとして内 部でシミュレーションを行っている。縦方向の道路が優先道路となっており、横方向から の車両は、交差点で一時停止することとなっているが、車両は見通し内に接近車両がなけ れば一時停止しないように設定してある。そのため、右方向から左方向へ向けて走行する 車両が一時停止せずに交差点へ進入し、図下方より上方へ向かって優先道路を走行する車 両と衝突している。
上で述べた運転行動モデルに、さらに、パケットを受信した車両は、その送信元の位置 情報を知ることができ、見通しがあるのと同じ判定をさせる拡張を、運転行動モデルに追 加した。電波伝搬モデルには今回は FUPMを用いた。
シミュレーションにおけるスナップショットを図 3-17に示す。
見通し外車両を認知し 交差点手前で減速
① ② ③
④ ⑤
図3-17 運転行動モデルに通信による見通し外の車両の検知機能を追加した時の
シミュレーションスナップショット
通信による車両の検知機能を運転行動モデルに追加することで、見通し外の車両であっ ても、見通しがあるものとして運転者は行動するため、右方向から交差点に接近する車両 は優先道路を下から上へ走行する車両を認識し、交差点手前で減速し、事故が回避されて いることが確認できた。
3.7 まとめ
本 F/Sでは、安全運転支援アプリケーションの評価を行うためのシミュレーション環境 構築として、交通流シミュレータ、通信シミュレータ、電波伝搬モデル、運転行動モデル、
見通し計算ライブラリ、安全運転支援アプリケーションの全てを統合した統合シミュレー ション環境構築を通し、現状での問題点や課題を明らかにした。
統合シミュレーション環境構築の第一段階(Phase 1)では、既存のツールを最大限に活 用し、早期に統合シミュレーション環境を構築するために、統合シミュレーションフレー ムワークを利用し、そこへ交通流シミュレータ(MATES)、通信シミュレータ(Scenargie)
を組み込むことで、統合シミュレーションの環境を構築した。構築した統合シミュレーシ ョン環境にて、車車間通信シミュレーションを行い、全体のパフォーマンスのプロファイ リングを行うことで、どの処理部分がボトルネックとなっているかを明らかにし、統合シ ミュレーション環境構築の最適化へ向けた指標を明らかにした。
統合シミュレーション環境構築の第二段階(Phase 2)では、第一段階にて構築した統合シ ミュレーション環境の問題点を改善し、統合の最適化を図るべく、全てのシミュレータを 直接リンクして 1つのバイナリ(プログラム)として動作する密結合の統合シミュレータ を構築した。また、統合のオーバーヘッドを削減するばかりでなく、それぞれの機能モジ ュールにおいても高速化を図るべく、運転行動モデルで使用する見通し計算ライブラリの 独自設計・開発、および電波伝搬モデルの開発とその妥当性の検証を行っている。
通信に お いて電波 伝 搬より上 位 のレイヤ で ある物理 層 およびデ ー タリンク 層 (Medium Access Control:MAC)のシミュレーション特性と、実証実験により得られた実測データの パケット受信特性とを比較することによる、シミュレータの物理層、データリンク層モデ ルの妥当性検証も行った。この評価では、実際に計測を行った 2点間のノードについては 実測データをそのままシミュレータで利用し、その他のノードについては、いくつかの電 波伝搬モデルにて評価を行っている。これにより、実測データのパケット受信特性とシミ ュレーションにより算出したパケット受信特性を比較することで、伝搬モデルを変えた時 の影響や、シミュレーションによる結果と実測データとの相関や乖離の割合を把握するこ とができた。
総合評価実行性能では、第一段階にて構築した統合シミュレータと、第二段階にて最適 化を行った統合シミュレータの両方で動作検証および実行速度の評価を行った。実行速度 の比較は、シミュレーションする車両台数を変化させながら、通信あり、なしの場合にお けるシミュレーション実行時間の比較を行った。シミュレーション実行時間の大部分が通 信シミュレータであること、車両台数が増えるに従って、通信シミュレータにかかるオー バーヘッドが大きくなることより、車両の台数が多い環境ではそれほど統合部分でのオー バーヘッドの差は大きくは出てこない。しかし、統合環境の最適化により、シミュレーシ ョンする車両台数が 750台の場合であっても 5倍程度、車両台数が少なくなれば、それ以 上の速度向上が実現できた。