都市構造の特徴に基づく一般化線型モデルを用いたロボカップレ
スキューエージェントの行動予測について
RoboCup Rescue agent of behavior prediction in generalized linear
model using the features of the urban structure
尾橋大
1∗伊藤 暢浩
1岩田 員典
2Dai Obashi
1Nobuhiro Ito
1Kazunori Iwata
21
愛知工業大学
1
Aichi Institute of Technology
2
愛知大学
2
Aichi University
Abstract: In RoboCup Rescue Simulation, a multi-agent simulator intended for disaster relief, it has been found that there is a close dependency between the result of the agent’s activity and the complexity of the city. In the previous research we tried to define the complexity of the city and predict the results of the behavior of the agent by multiple regression analysis. However, could not predict the behavior sufficiently. In this paper, using the generalized linear mixed model to clarify the dependency, we have tried to predict the behavior of the results of the agent.
1 はじめに
近年,世界各地で大規模な自然災害による被害が頻 発しているため,地震災害に対しての警戒が高まってい る.このような地震災害に対する取り組みの一つに災 害救助シミュレーションとしてのロボカップレスキュー シミュレーション [1] がある.これは被災した仮想都市 において,様々な種類の災害や災害救助部隊,市民の 振る舞いをシミュレートするマルチエージェントシミュ レータである.ロボカップレスキューシミュレーション におけるエージェントの活動評価は,シミュレーション の環境とエージェントの戦略に依存しているため,エー ジェントと環境との依存関係を調べる必要がある.
このような背景に対して纐纈らは,建物と道路の情 報に着目し,エージェントの評価と環境との依存関係 を分析した [2].まず纐纈らは建物と道路に関する特徴 を数値化し,13 項目を「建物および道路に関する地図 の特徴の指標」として定義した.次に二つのエージェ ントアルゴリズムを用いてロボカップレスキューシミュ レーションをおこない,得られた結果と定義した地図 の特徴指標との依存関係を分析考察した.その結果,定 義した地図の特徴指標とエージェントの評価の依存関 係は,エージェントアルゴリズムによって異なること がわかった.しかし,建物および道路に関する地図の
∗連絡先:愛知工業大学
愛知県豊田市八草町八千草 1247
TEL:(0565)48-8121 FAX:(0565)48-0277 E-mail: [email protected]
特徴の指標からエージェントの評価を予測することが できなかった.
纐纈らの研究を受けて鈴木らは,纐纈の提案した手法 によりエージェントの評価の予測がおこなえるか検討 した [3].鈴木らは纐纈の定義した地図の特徴の指標を 減らすことにより分析をおこなった.しかし,エージェ ントの評価の予測を十分にすることが出来なかった.
また,福田 [4] は十分に予測をおこなえている地図と 十分に予測をおこなえていない地図の 2 つに分類し,纐 纈の定義した地図の特徴指標とエージェントの評価と の依存関係について分析した.十分に予測をおこなえ ていない地図をクラスタとしてまとめることはできた が,すべての地図に対する十分な予測はできなかった.
本研究では,既存研究で定義されてきた指標に対し て一般化線形混合モデルによる統計解析をおこなう.特 徴として表現しきれていない要素を踏まえた分析をす ることが可能であることと,正規分布以外のデータに 対応していることから,従来用いてきた分析手法であ る重回帰分析に比べ,高い精度でエージェントの評価 値と地図の特徴の依存関係を表す回帰式が得られると 考えられることから一般化線形混合モデルを使用した.
その結果,重回帰分析に比べて高い精度でエージェ ントの活動結果を予測できたことから一般化線形混合 モデルはエージェントと環境の依存関係を表す手法と して有効であるとわかった.
2 関連研究
2.1 地図情報による災害救助エージェントの
活動予測の検討
纐纈ら [2] は地図データから道路と建物の特徴量を抽 出しマルチエージェントシステムの評価と比較分析を おこなった.纐纈らは災害救助エージェントの評価と の依存関係を調べるための計算項目であることを考慮 し,災害救助活動の特性を踏まえて建築面積,建物の 要素,建物と建物の位置関係,建物と道路の位置関係, 密度の 5 分類にわけて 16 の指標を定義した.しかし, 定義した指標間に強い相関関係が存在する場合,統計 分析をする際に正確な分析が難しくエージェントと地 図の特徴指標の依存関係を正しく分析できない.その ため,多重共線性を基準にして強い相関のある項目を 取り除き,以下の 11 の項目を地図の特徴指標として定 義した.
• グロス容積率の平均値
• 建物の周長の平均値
• 建物の階数の平均値
• 従属度の平均値
• 最大隣接建物の平均値
• 配置配分比の平均値
• 接道距離の平均値
• 隙間率の平均値
• 道路の総延長
• 道路密度
• 棟数密度
また,鈴木 [3] は纐纈らが提案した指標を用いて重回 帰分析によるエージェントの活動予測をおこなった.4 種類の災害救助エージェントの評価値と纐纈らの提案 した地図の特徴との依存関係を検討し,纐纈の提案し た指標では,災害救助エージェントの活動予測を十分 な精度でおこなうことができないと結論付けた.
2.2 地図の分類についての研究
福田 [4] は鈴木の結果を受けて,自己組織化マップに よりクラスタリングをおこない地図を分類することで, 以下の点から地図の特徴の指標とエージェントの評価 との依存関係を分析しやすくなると考えた.
• 類似した傾向を持つ地図をまとめることができる
• 他の地図とはまったく異なる特徴を持つ例外的な 地図を特定できる
自己組織化マップとは,多次元のデータを 2 次元平面 上のノードに写像する方法として 1982 年に Kohonen によって開発された競合学習型ニューラルネットワー クの一種である [7].このニューラルネットワークは入 力層と出力層の 2 層から成っており,教師信号を必要 としない教師なし学習をおこなう.自己組織化マップ の特徴は高次元のデータをそのトポロジカルな関係を 保持したまま 2 次元の出力空間(マップ空間)に写像す ることが出来ることである.そのため,複雑に絡み合 う膨大な情報の中から相関関係や傾向を抽出し,デー タの構造や傾向,意味づけといったものを見やすくす ることに有効とされている.
福田は自己組織化マップを用いて十分な予測ができ る地図とできない地図にクラスタリングした.2 つの グループには大きな違いがあると考え,それぞれのグ ループに重回帰分析をおこなうことで個別に回帰式を 生成し,エージェントの評価を予測した.結果として, うまく予測できる地図群とできない地図群にわかれた ことから,十分な特徴指標ではないと結論づけた.
2.3 道路ネットワークの複雑さについての
研究
平均探索情報量を用いて,都市の道路網の複雑さと ロボカップレスキューシミュレーションにおける災害 救助シミュレーションとの関係の分析をおこなった ” RoboCup Rescueシミュレーションに対する距離概念 を導入した平均探索情報量の提案 ”[5] がある.ここで は平均探索情報量をもとに災害救助に適した,より詳 細な都市道路ネットワークの定量化指標の提案をおこ ない,ロボカップレスキューシミュレーションとの依 存関係の分析をおこなった.
平均探索情報量は,Rosvall ら [6] によって提唱され た都市道路網の複雑さを数値化する指標である.この 指標は道路に注目した解析をおこなうため,道路ネッ トワークをグラフへと変換する際に道路をノード,交 差点をエッジとして表現する.これにより,道路から 道路への結合にのみ注目したグラフが得られるが,こ のグラフには距離の情報を含まない.
災害救助を考える上で目的の場所へ素早く到達する ことは重要であり,目的地までの距離は短いほど早く 目的地へ移動が可能となる.そのため,目的の場所へ 早くたどり着くために目的地までの経路の距離情報は 重要であることから,距離という情報を,重みという 形で平均探索情報量に与えることによって,ロボカッ
プレスキューシミュレーションにより適した指標を提 案し,回帰分析による分析をおこなっている.結果と して,エージェントの能力の評価値と道路ネットワー クの複雑さの指標との間には依存関係があることがわ かったが,この指標のみでは回帰分析による依存関係 は表せなかった.
2.4 関連研究のまとめ
すべての研究に共通する手順としてエージェントの 評価値と環境を表す指標の依存関係の分析に単回帰分 析もしくは重回帰分析を用いている.これらの回帰分 析は依存関係を直線により表す線形モデルに属する統 計手法であることから多くのデータが例外となり過分 散になりやすい傾向がある.そのため,特徴指標が地 図を完全に表現するような値を定義しなければ十分な 回帰式は得られない.
しかし,地図は膨大な情報の集まりであり,地図を 完全に表現するような特徴指標の定義は困難であるか ら,観測されていないデータによる個体差を表現でき る統計手法である一般化線形混合モデルを用いること で,新たな指標を導入することなく十分な精度の予測 をおこなえると考えられる.
また,重回帰分析が扱える確率分布は正規分布のみ となる.そのため,エージェントの評価値と環境を表 す指標の依存関係が正規分布以外の確率分布に従って いる場合には正確な関係を表すことが難しい.確率分 布の点からも,様々な確率分布を扱うことができる一 般化線形混合モデルを用いる必要がある.
3 一般化線形混合モデルによるエー
ジェントの行動予測
3.1 研究の目的
都市情報とエージェントの評価値の依存関係を明確 化するため,一般化線形混合モデルを用いて回帰式を 生成する.関連研究 [5] では単回帰分析を,[2][4] では 重回帰分析によってエージェントの評価値との関係を 定義しているが,依存関係を充分に説明できる回帰式 は得られていない.そのため本研究では,特徴として 表現しきれていない要素を考慮した分析が可能となる 一般化線形混合モデルを用いることで,依存関係を表 すような回帰式の生成を目指す.一般化線形混合モデ ルは重回帰分析を含む統計手法である線形モデルを拡 張した手法 [8] である.また,得られた回帰式に基づき, 各地域におけるエージェントの評価値を推定し,実際の シミュレーション結果と比較することで手法の有効性を 検討する.本研究ではロボカップレスキューシミュレー
ションを対象とする.そのため,次節ではレスキュー エージェントの評価値を説明し,その後,一般化線形 混合モデルによるアプローチを説明する.
3.2 ロボカップレスキューシミュレーション
における評価
ロボカップレスキューシミュレーションは地震災害 による火災や建物倒壊,道路閉塞が発生した被災都市 において,災害救 助隊が市民の救助および火災の消火 をおこなうシミュレー ションである.ロボカップレス キューシミュレーションにおけるエージェントの評価 値は,そのエージェントによる消火活動や救助活動な どにより,市民の死傷や火災といった都市の被害を式
(1)によって求まる都市価値 V によって評価する.た だし P は災害救助活動後に生存しているエージェント の数,S は災害救助活動後におけるすべてのエージェ ントの体力の合計,Sintは災害救助活動前におけるす べてのエージェントの体力の合計,B は災害発生に燃 え残った建物の面積,Bintは災害発生前におけるすべ ての建物の面積である.
V = (
P+ S Sint
) √ B Bint
(1) しかしエージェントの評価値は環境に依存しており, 環境である地図の変更によって,エージェントの評価 値が変化する.すなわち,エージェントの持つ純粋な 能力の評価をおこなうためにはエージェントと地図の 間に存在する依存関係を明らかにする必要がある.
3.3 線形モデル
線形モデルとは分散分析や回帰分析を含む統計モデ ルである.線形モデルは全ての要素が線形結合で表さ れるようなモデルとなっており,式 (2) のような式に なる.式 (2) は i 個の独立変数 x から目的変数 y を説 明するような回帰係数 β を得る回帰モデルである.
y= β0+ β1x1+ · · · + βixi (2) また,線形モデルは正規分布に従っており,ある個体 iにおいて目的変数を推定したときの値 yiになる確率 p(yi|λi)は正規分布となる.このとき λ は平均とする.
3.4 一般化線形モデル
一般化線形モデルとは線形モデルの拡張であり,p(yi|λi) が正規分布以外の確立分布に従うような回帰式を扱う 手法である.正規分布以外の分布として以下のような 指数型分布族の確立分布を扱うことができる.
• ポアソン分布
• 二項分布
• ガンマ分布
このような正規分布していないデータ群においては データ間の関係が相乗的であり,回帰分析をおこなう には線形結合な関係に整理する必要がある.その手法 として変数変換と一般化線形モデルの 2 つがある.
変数変換とはデータに対して対数変換などをおこな い正規分布に近づける方法である.データ群そのもの を正規分布に近づけた後,線形モデルに当てはめるこ とで回帰式を得る.しかし,変数変換後に得られた回 帰式では回帰係数の解釈が難しいため,一般化線形モ デルを使用することが多い.
一般化線形モデルにおいても線形結合な関係への変 換はおこなわれる.しかし,変換は回帰係数の推定後 におこなわれるため係数の推定値が直感的にわかりや すい.一般化線形モデルは変換前の状態でモデル化さ れているため,係数推定値の意味はそのまま解釈する ことができる.また,一般化線形モデルにおいて線形 結合な関係に変換する関数をリンク関数と呼ぶ.式 (3) に一般化線形モデルを示す.ここではリンク関数にロ ジット関数を用いる.
log p
1 − p = β0+ β1x1+ · · · + βixi (3)
3.5 一般化線形混合モデル
一般化線形混合モデル [8] は目的変数の期待値が何ら かの要因によって変動していることを想定したもので ある.回帰モデルの当てはまりの悪さは,目的変数の ばらつきに影響を与える定量化されていない要因に原 因がある.この要因はサブクラスタと呼ばれ,サンプ ルを収集する実地日や場所差,個体差などが属してい ると考えられる.そのため一般化線形混合モデルでは サブクラスタ毎に期待値が異なると仮定し,各サブク ラスタに誤差を与えることでサブクラスタによる差異 を表す.このとき,測定される要因によるパラメータ を固定効果 βF ixed,サブクラスタにより与えられる誤 差をランダム効果 βRandomという.一般化線形モデル で使われる固定効果にランダム効果を混ぜ合わせるた め一般化線形混合モデルと呼ばれる.式 (4) に一般化 線形混合モデルを示す.
log p
1 − p = (β0F ixed+ β0Random)+ (β1F ixed+ β1Random)x1+ · · · +
(βiF ixed+ βiRandom)xi (4)
3.6 決定係数
線形モデルにおいて,そのモデルの当てはまりの良 さは決定係数という指標を用いることで説明すること が可能である.モデルの当てはまりの良さとは,回帰 モデルにおいて目的変数 y を推定した値が実際に観察 される実測値をどの程度説明できているかを表してい る.決定係数は,必ず 0 から 1 の範囲になるため,当 てはまりの良さが直感的にわかりやすいことが挙げら れる.0 なら一切あてはまっておらず,1 なら完全にあ てはまっていることを示す.決定係数の精度の基準に ついては表 1 に示す.また,決定係数は独立変数の数 が増えるほど 1 に近づくこと問題点がある.そのため, 複数の独立変数を用いる重回帰分析においては自由度 調整済み決定係数を用いる.
表 1: 決定係数による回帰直線の精度の基準 決定係数 R2 回帰直線の精度
R2≥ 0.8 精度よい 0.8 > R2≥ 0.5 精度ややよい
0.5 > R2 精度よくない
しかし,一般化線形モデルや一般化線形混合モデル においては指数型分布族の確立分布を扱っており,決 定係数が得られない.そのため,これらのモデルでは McFaddenの疑似決定係数 [9] を用いることで,モデル の当てはまりの良さを示す.ただし,この疑似決定係 数は決定係数と比べて小さい値となる傾向がある.
4 実験
実験目的と手順
本実験は纐纈ら [2] が定義した地図の特徴の指標を用 いて一般化線形混合モデルによる回帰式を生成するこ とで,地図の特徴指標とエージェントの評価値の依存 関係を示すことを目的としている.また,一般化線形 混合モデルにより生成した回帰式と重回帰分析により 生成した回帰式を用いて,エージェントの評価値を予 測することで回帰式の比較をおこなう.
なお,本実験では回帰式を得るために必要なエージェ ントの評価値と地図の特徴指標が含まれたデータを 52 地域,得られた回帰式に入力することでエージェント の評価値を推定するために必要な地図の特徴指標を含 んだデータを 26 地域用意した.
使用するエージェントアルゴリズム
動作するエージェントアルゴリズムによって,特に 影響を受ける特徴指標が異なることから依存関係が変 化し,エージェントごとに異なる回帰式が得られると 考えられる.そのため RoboCup2014 において上位で あった S.O.S と MRL のチームを使用する.各チーム の特徴を以下に示す.
S.O.S(イラン)
S.O.Sは消防隊に特徴がある.S.O.S は地図を 6 つに分割し,それぞれの地域に専属のエージェン トを割り当てている.各エージェントグループは 更に 3 つのグループにわかれており,各エージェ ントには以下の様な役割が与えられている.
• 火災の消火をおこなうグループ
• 消火済み建物が再燃していないか確認する グループ
• 複数箇所で火災が発生した際に対応する消 火のサブグループ
MRL(イラン)
MRLは K-Means 法や凸包アルゴリズムを用い て地図を切り分けクラスタリングをおこなってい る.また,ハンガリアンアルゴリズムや集合被覆 問題と貪欲法を用いることで,移動距離を最短に するようなエージェントの割り当てをおこなって いる.
対象とする地図
ロボカップレスキューシミュレーションで使用され ている地図は以下の要素から構成され,GML 形式に よって記述される.GML 形式とは地理空間データを符 号化する際に使われる XML ベースのマークアップ言 語である.
Node
(x, y)座標によって建物や道路の角となる点を定 義する.
Edge
始点,終点のノードを指定することで 2 つの Node 間を結ぶ辺を定義する.
Face(Building, Road)
3つ以上の Edge によって空間を定義する.各 Face には Building もしくは Road が属性として定義 される.
隣接する Face は neighbor パラメータによって指 定することで接続される.
また,すべての要素にはユニークな ID が与えられて いる.
本研究では基盤地図情報 [10] に含まれる道路縁及び 建物の外周線情報を用いてロボカップレスキューシミュ レーションで使用される形式の地図に変換する.基盤 地図情報とは,基盤地図情報とは 2002 年から国土地理 院がインターネット上で無償で公開している国土空間 データ基盤である.
シミュレーション回数
ロボカップレスキューシミュレーションでは同じ地 図データでもエージェントの配置の違いなどによりシ ミュレーションの結果が変化する.そのため本実験で は,複数回おこなったシミュレーションの平均値を各 地図データにおけるシミュレーション結果とする.
ここで,1 つの地図データにおけるエージェントの 評価値の母平均を µ,標本の平均を ¯V,標本の標準偏 差を σ とする.ある地図データで 30 回のシミュレー ションをおこない, ¯V,σ を求めた.そして,信頼率 95%で µ − σ ≤ ¯V ≤ µ + σの範囲に ¯V の値が入るため のシミュレーション回数を求めたところ,おおよそ 18 回であった.このことから,十分に母平均が推定でき るシミュレーション回数として,1 つの地図データに対 し 30 回のシミュレーションをおこなうこととする.
5 実験結果と考察
5.1 地図の特徴指標とエージェントの評価値
との依存関係
地図の特徴指標を独立変数,エージェントの評価値を 従属変数として一般化線形混合モデルにより回帰式を 得た.得られた回帰係数を表 3 に示す.また,各係数が 係る独立変数を表 2 に示す.この結果から,β1,β7,β9 の値が他に比べ突出している.このことから,両エー ジェントの評価値と強い依存関係のある要素は β1,β7, β9によって影響を受けるセミグロス建蔽率,隙間率, 道路の密度であることがわかる.
セミグロス建蔽率は道路で囲われた枠内の建物の割 合,隙間率は建物に接している道路と接していない道 路の割合であり,道路の密度は単位面積当たりの道路 の割合であることから,道路をまたぐような火災の広 がりに影響のある要素がエージェントに影響を与えて いると考えられる.
配置配分比に係る係数 β5は S.O.S では大きく影響し ているが MRL では影響が少ない.配置配分比は隣接 する建物の間隔の等しさを表しており,値が 0 に近い
ほど等間隔で建物が並んでいることから S.O.S は建物 の並びによっても影響をうけることがわかる.
また,β8から道路の総延長は両エージェントともに 影響をほとんど受けていない.
以上の点から,エージェントの活動は建物や道路の 密度に類する要素を持つ特徴量に影響を受け易いこと がわかる.
また,各回帰分析により得られた式の決定係数を表 4に示す.一般化線形混合モデルにおいては両エージェ ントモデル共に重回帰分析と比べ高い値を示している. また,疑似決定係数においても 0.5 以上の値を示して おり,回帰式の精度はややよいといえる.特に S.O.S においては,自由度調整済み決定係数の値から重回帰 分析の精度が悪いことがわかるが,一般化線形混合モ デルによって精度が大きく改善している.
表 2: 回帰係数と独立変数の対応 回帰係数 従属変数の要素 要素の分類
β0 切片
β1 セミグロス建蔽率 建築面積
β2 建物の周長 建物
β3 従属度 建物の位置 β4 最大隣接建物距離 建物の位置 β5 配置配分比 建物の位置
β6 接道距離 道路と建物
β7 隙間率 道路と建物 β8 道路の総延長 密度
β9 道路密度 密度
β10 棟数密度 密度
表 3: 一般化線形混合モデルにおける回帰係数 回帰係数 エージェントアルゴリズム
S.O.S MRL β0 1.9974 1.1771
β1 -0.2728 -0.5653 β2 0.0013 0.0074 β3 -0.0562 -0.03961 β4 0.0379 -0.0103
β5 0.6312 -0.0629 β6 -0.0196 -0.0054 β7 0.5713 0.7901 β8 -8.9542×10−
6 -7.0806×10−6 β9 -1.4852 0.8089
β10 -0.0623 0.0039
表 4: 決定係数による回帰式の精度 エージェント S.O.S MRL 重回帰分析 0.3301 0.5674 一般化線形混合モデル 0.5054 0.6776
5.2 エージェントの評価値の推定
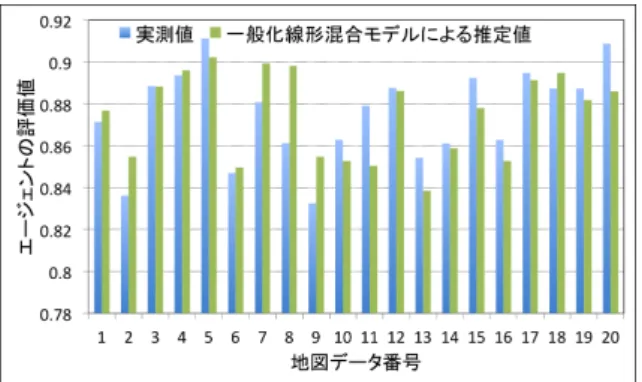
S.O.Sと MRL それぞれ重回帰分析と一般化線形混合 モデルによるエージェントの評価値の推定をおこなっ た.それぞれの推定値とシミュレーションの実測値の 差の標準偏差を表 5 に示す.また,S.O.S の推定結果を 図 1 および図 2 に,MRL の推定結果を図 3 および図 4 に示す.
S.O.Sでは重回帰分析により導かれた推定値は過大 な傾向があるが,一般化線形混合モデルによって修正さ れ実測値に近い値を推定することに成功している.ま た,重回帰分析が十分正確に推定しているような地図 においては実測値と比べて小さな値となっているが,表 5 から重回帰分析よりも一般化線形混合モデルの標準 偏差の値が小さいことからも一般化線形混合モデルの 推定値が実測値に近いことがわかる.
表 5: 一般化線形混合および重回帰分析による推定値 の標準偏差
エージェント S.O.S MRL 重回帰分析 17.8753 × 10−3 9.3132 × 10−3
図 1: 重回帰分析によるエージェントの評価値の推定 (S.O.S)
MRLにおける一般化線形混合モデルは重回帰分析 と比べてわずかに大きな値を推定値とする傾向がある.
図 2: 一般化線形混合モデルによるエージェントの評価 値の推定 (S.O.S)
しかし S.O.S が大きく改善したのに比べ,重回帰分析 に類似した値を推定値としており,おおきな改善はみ られなかった.表 5 からわかる標準偏差の値について も大きな差はない.これは重回帰分析による回帰式そ のものの誤差が少なかったことから一般化線形混合モ デルと大きな違いがなかったと考えられる.
本研究ではエージェントの評価値は正規分布に従っ ていないと考え実験をおこなったが,MRL における結 果では重回帰分析と大きな違いは見られなかった.こ のことから MRL の評価値は正規分布に近い確率分布 に従っていると考えられる.しかし S.O.S においては 二項分布に従うような一般化線形混合モデルによって 大きな改善が見られた.以上の点からエージェントモ デルによって評価値の従う確率分布が異なることが考 えられる.
図 3: 重回帰分析によるエージェントの評価値の推定 (MRL)
6 まとめ
本研究では大規模災害救助シミュレーションである ロボカップレスキューシミュレーションを対象に,そ の環境である建物と道路を含む都市情報により構成さ れる地図データとエージェントの能力の関係について
図 4: 一般化線形混合モデルによるエージェントの評価 値の推定 (MRL)
考察した.エージェントの評価値と地図の特徴指標を 一般化線形混合モデルを用いて依存関係を分析したと ころ,回帰係数の値からエージェントの活動に強く影 響を与えている要素がわかった.特に強い影響を与え る要素がセミグロス建蔽率,隙間率,道路の密度であ ることから,道路をまたぐような火災の広がりに影響 のある要素との依存関係が強いと考えられる.
また,分析結果からエージェントの評価値を推測し 重回帰分析と比較分析した.重回帰分析において十分 に依存関係を説明できているような地図においては一 般化線形混合モデルでも大きな改善はなく,同様の値 を推定することができた.また,重回帰分析での推定 値が大きく外れるような地図においては比較的実測値 に近い値を推定することができた.実測値と推定値の 差の標準偏差においても一般化線形混合モデルでは差 が小さくなったことから,一般化線形混合モデルは重 回帰分析と比べるとエージェントの能力と地図の特徴 指標の依存関係を表せていることがわかった.
また,今後の課題として以下のことが考えられる. 多くのエージェントによるシミュレーション
本研究では 2 つのエージェントのみを使用したた め,十分なサンプルを使用した分析とはなってい ない.今回,エージェントモデルによって確率分 布が異なることがわかったことからも,今後はよ り多くの種類のエージェントを使用することでよ り適した分析手法を選択する必要がある. 多くのシナリオによるシミュレーション
本研究では地図毎に配置するエージェント数や地 図の大きさは固定し実験をおこなった.しかし, エージェント数の変化や地図の大きさ,災害の状 況によってエージェントの発揮する能力は変化す る.そのため,様々な条件下でのシミュレーショ ンをおこなうことで,より正確にエージェントと 地図の依存関係を示す必要がある.
他の分析手法の模索
今回,重回帰分析にかわり一般化線形混合モデル を用いることで依存関係を表す回帰式の改善がお こなわれた.しかし,エージェントと都市構造の 関係を定義する手法として,一般化加法モデルな どの統計手法や,エージェントの評価値を教師と した教師あり学習としてサポートベクターマシン やニューラルネットワーク,一般化加法モデルが 考えられる.今後はこれらの手法を用いた分析を 検討する必要がある.
参考文献
[1] RoboCupRescue http://www.robocuprescue. org/index.html
[2] 伊藤暢浩,岩田員典,纐纈寛明,”偏相関分析によ る地図の特徴指標とマルチエージェントシステム 評価値の分析 ”,知能と情報(日本知能情報ファ ジィ学会誌)Vol26,No3,pp.658-668,2014. [3] 鈴木俊人,”地図情報による災害救助エージェント
の活動予測の検討 ”,名古屋工業大学 平成 19 年 度卒業論文,2008.
[4] 福田佑,”地図の特徴とエージェントの評価との関 係における地図の分類について ”,名古屋工業大 学大学院,平成 21 年修士論文.
[5] 尾橋大,川村真之,伊藤暢浩,”RoboCup Rescue シミュレーションに対する距離概念を導入した平 均探索情報量の提案 ”,人工知能学会「社会にお ける AI」研究会 第 18 回研究会,2013. [6] M. Rosvall, A. Gronlund, P. Minnhagen, and K.
Snep-pen,“Searchability of networks”. Physical Review E72, 046117,2005.
[7] T.Kohonen著,徳高平蔵,大藪又茂,堀尾恵一, 藤村喜久郎.”自己組織化マップ シュプリンガー・ ジャパン ”,2005.
[8] 久保 拓弥,粕谷 英一,”「個体差」の統計モデリン グ”,日本生態学会誌 Vol.56(2),pp181-190.2006. [9] McFadden,”Conditional logit analysis of quali-
tative choice behavior”,Frontiers in Economet- rics Academic Press, pp.105-142,1974. [10] 基盤地図情報サイト http://www.gsi.go.jp/
kiban/