Mixture of Gaussians
Sargur Srihari
srihari@cedar.buffalo.edu
Mixtures of Gaussians
• Also Called as Finite Mixture Models (FMMs)
∑
=
Σ
=
K
k
k k
k
N x
p
1
)
,
|
(
)
x
( π µ
Goal: Determine the three sets of parameters using maximum likelihood
Gaussian Mixture Model
• A linear superposition of Gaussian components
• Provides a richer class of density models than
the single Gaussian
• GMM are formulated in terms of discrete latent
variables
– Provides deeper insight – Motivates EM algorithm
• Which gives a maximum likelihood solution to no. of components and their means/covariances
GMM Formulation
• Linear superposition of K Gaussians:
• Use 1-of-K representation for latent variable z
– Let z = z1,..,zK whose elements are
– There are K possible states of z corresponding to K components
• Define joint distribution p(x,z)=p(x|z)p(z)
∑
=
Σ
=
K
k
k k
k
N x
p
1
)
,
|
(
)
x
( π µ
marginal conditional
zk ∈{0,1} and zk = 1
k
∑
p(z)
• We need to associate a probability with each
component k
• Denote where parameters
satisfy
• Because z uses 1-of-K it follows that
– since components are mutually exclusive and hence are independent
1
(z)
kK
z k k
p π
=
= ∏
p(z
k= 1) = π
k0 ≤ π
k ≤ 1 and πk = 1 k
∑
With one component p(z1) = π1z1
With two components p(z1, z2) = π1z1π2z2
Conditional distribution p(x|z)
• For a particular component (value of z)
• Thus p(x|z) can be written in the form
• Thus marginal distribution of x is obtained by summing over all possible states of z
• This is the standard form of a Gaussian mixture
p(x | z) = N x |( µk,Σk)zk
k=1 K
∏
p(x) = p(z) p(x | z) = πkzk
k=1 K
∏
N x |( µk,Σk)zkz
∑
= πkN x |( µk,Σk)k=1 K
∑
z
∑
p(x | zk = 1) = N (x | µk, Σk )
Due to the exponent zk all product terms except for one equal one
7
Latent Variable
• If we have observations x1,..,xN
• Because marginal distribution is in the form
– It follows that for every observed data point xn there is a corresponding latent vector zn , i.e., its sub-class
• Thus we have found a formulation of Gaussian mixture involving an explicit latent variable
– We are now able to work with joint distribution p(x,z) instead of marginal p(x)
• Leads to significant simplification through introduction of expectation maximization
p(x) = p(x,z)
z
∑
Another conditional probability (Responsibility)
• In EM p(z |x) plays a role
• The probability p(zk=1|x) is denoted
• From Bayes theorem
• View as prior probability of component k as the posterior probability
it is also the responsibility that component k takes for explaining the observation x
γ(zk) ≡ p(zk = 1 | x) = p(zk = 1) p(x | zk = 1) p(zj = 1) p(x | z j = 1)
j=1 K
∑
= πkN(x |µk,Σk) πjN(x |µk,Σj)
j=1 K
∑
γ (zk )
γ (zk ) = p(zk = 1| x)
p(zk = 1) = πk
Plan of Discussion
• Next we look at
1. How to get data from a mixture model synthetically and then
2. How to estimate the parameters from the data
Synthesizing data from mixture
• Use ancestral sampling
– Start with lowest numbered node and draw a sample,
• Generate sample of z, called z^
– move to successor node and draw a sample given the parent value, etc.
• Then generate a value for x from conditional p(x|z^)
• Samples from p(x,z) are plotted
according to value of x and colored with value of z
• Samples from marginal p(x)
obtained by ignoring values of z
500 points from three Gaussians
Complete Data set
Incomplete Data set
11
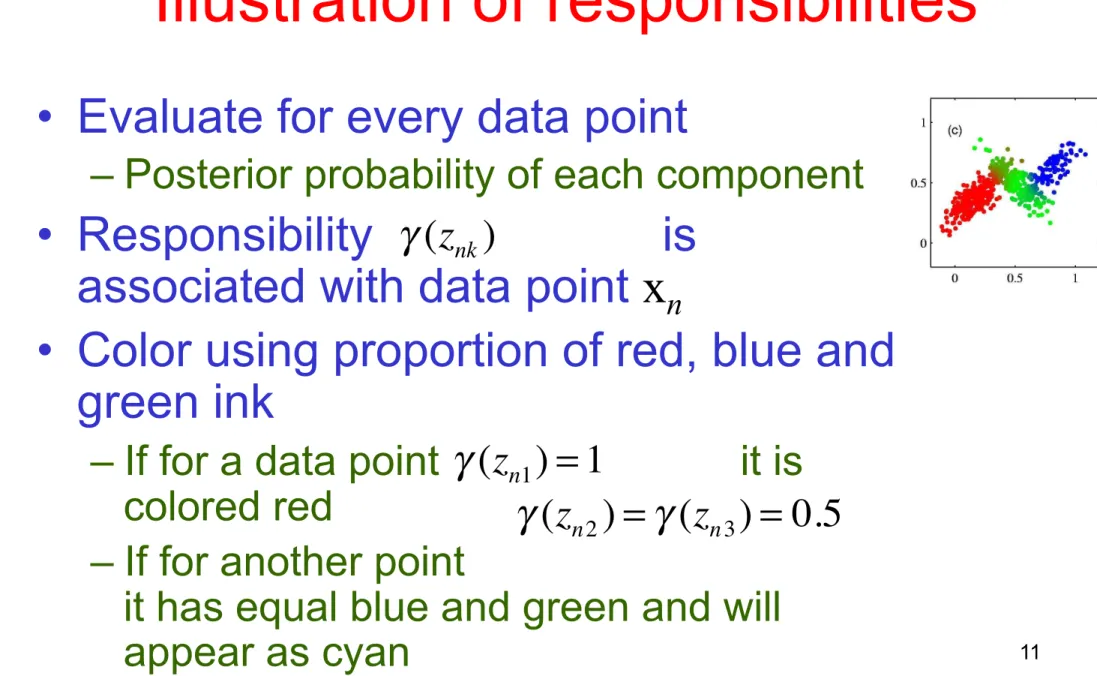
Illustration of responsibilities
• Evaluate for every data point
– Posterior probability of each component
• Responsibility is
associated with data point x
n• Color using proportion of red, blue and
green ink
– If for a data point it is colored red
– If for another point it has equal blue and green and will
appear as cyan
γ (znk )
γ (zn1) = 1
γ (zn2) = γ (zn3) = 0.5
Maximum Likelihood for GMM
• We wish to model data set {x1,..xN} using a mixture of Gaussians (N items each of dimension D)
• Represent by N x D matrix X
– Nth row is given by xnT
• Represent N latent variables with N x K matrix Z with rows znT
• Bayesian Network for p(x,z) is
We are given N i.i.d. samples {xn} with unknown latent points {zn} with parameters πn.
The samples have parameters: mean µ and covariance Σ
Goal is to estimate the three sets of parameters
X = x1 x2 xn
"
#
$ $
$
$
%
& ' ' ' '
Z = z1
z2
zn
"
#
$
$
$
$
%
& ' ' ' '
Likelihood Function for GMM
13
p(x) = p(z) p(x | z) = πkN(x |µk,Σk)
k=1 K
∑
z
∑
Therefore Likelihood function is
p(X |π,µ,Σ) =
k=1
∑
K πkN(xn |µk,Σk)⎧ ⎨
⎩
⎫ ⎬
n=1 ⎭
∏
NTherefore log-likelihood function is
ln p(X |π,µ,Σ) = ln
k=1
∑
K πkN(xn |µk,Σk)⎧ ⎨
⎩
⎫ ⎬
n=1 ⎭
∑
NWhich we wish to maximize
A more difficult problem than for a single Gaussian
Mixture density function is
Summation is for
Marginalizing the joint
Product is over the N i.i.d. samples
Maximization of Log-Likelihood
• Goal is to estimate the three sets of
parameters
• Before proceeding with the m.l.e. briefly
mention two technical issues:
– Problem of singularities
– Identifiability of mixtures 14
ln p(X | π , µ , Σ) = ln
k=1
∑
Kπ
kN (x
n| µ
k, Σ
k)
⎧ ⎨
⎩
⎫ ⎬
⎭
n=1
∑
Nπ , µ , Σ
15
• Consider Gaussian mixture
– components with covariance matrices
• Data point that falls on a mean will contribute to the likelihood function
• As term goes to infinity
• Therefore maximization of log-likelihood is not well-posed
– Interestingly, this does not happen in the case of a single Gaussian
• Multiplicative factors go to zero
– Does not happen in the Bayesian approach
• Problem is avoided using heuristics
– Resetting mean or covariance
2
1/2
1 1
(x | x , )
n n j (2 )
j
N σ I
π σ
=
One component assigns finite values and other to large value
Multiplicative values Take it to zero
σ j → 0
Σk = σk 2I
µj = xn
Problem of Identifiability
A K-component mixture will have a total of K! equivalent solutions
– Corresponding to K! ways of assigning K sets of parameters to K components
• E.g., for K=3 K!=6: 123, 132, 213, 231, 312, 321
– For any given point in the space of parameter values there will be a further K!-1 additional points all giving exactly same distribution
• However any of the equivalent solutions is as good as the other
A
B
C B
A C Two ways of labeling three Gaussian subclasses
A density p(x |θ) is identifiable if θ ≠θ ' then there is an x for which p(x |θ) ≠ p(x |θ')
EM for Gaussian Mixtures
• EM is a method for finding maximum likelihood solutions for models with latent variables
• Begin with log-likelihood function
• We wish to find that maximize this quantity
• Take derivatives in turn w.r.t
– Means and set to zero
– covariance matrices and set to zero – mixing coefficients and set to zero
ln p(X |π,µ,Σ) = ln
k=1
∑
K πkN(xn |µk,Σk)⎧ ⎨
⎩
⎫ ⎬
n=1 ⎭
∑
Nπ , µ , Σ
µk
Σ
kπ
k18
EM for GMM: Derivative wrt
• Begin with log-likelihood function
• Take derivative w.r.t the means and set to zero
– Making use of exponential form of Gaussian – Use formulas:
– We get
the posterior probabilities
ln p(X |π,µ,Σ) = ln
k=1
∑
K πkN(xn |µk,Σk)⎧ ⎨
⎩
⎫ ⎬
n=1 ⎭
∑
N
0 = πkN(xn | µk,Σk) π jN(xn | µj,Σj)
∑
j n=1N
∑
(xn − µkk
∑
−1 )d
dx ln u = u'
u
and d dx
eu = euu'
Inverse of covariance matrix
µ
kµ
kγ (z )
M.L.E. solution for Means
• Multiplying by (assuming non-
singularity)
• Where we have defined
– Which is the effective number of points assigned to cluster k
1
1 ( )x
N
k nk n
k n
z
µ N γ
=
=
∑
Mean of kth Gaussian component is the weighted mean of all the points in the data set:
where data point xn is weighted by the posterior probability that
component k was responsible for generating xn
Nk = γ(znk)
n=1 N
∑
Σ
kM.L.E. solution for Covariance
• Set derivative wrt to zero
– Making use of mle solution for covariance matrix of single Gaussian
– Similar to result for a single Gaussian for the data set but each data point weighted by the corresponding posterior probability
– Denominator is effective no of points in component
Σk = 1
Nk γ(znk)(xn − µk)(xn − µk)
T n=1
N
∑
Σ
kM.L.E. solution for Mixing Coefficients
• Maximize w.r.t.
– Must take into account that mixing coefficients sum to one
– Achieved using Lagrange multiplier and maximizing
– Setting derivative wrt to zero and solving gives
k k
N
π
= Nln p(X |π,µ,Σ) + λ πk −1
k=1
∑
K⎛
⎝ ⎜ ⎞
⎠ ⎟
ln p(X | π , µ , Σ) π
kπ
kSummary of m.l.e. expressions
• GMM maximum likelihood estimates
22 1
1 ( )x
N
k nk n
k n
z
µ N γ
=
=
∑
Σk = 1
Nk γ(znk)(xn − µk)(xn − µk)
T n=1
N
∑
k k
N
π
= N Nk = γ(znk) n=1N
∑
Parameters (means)
Parameters(covariance matrices)
Parameters
(Mixing Coefficients)
All three are in terms of responsibliities
EM Formulation
• The results for are not closed form
solutions for the parameters
– Since the responsibilities depend on those parameters in a complex way
• Results suggest an iterative solution
• An instance of EM algorithm for the
particular case of GMM
µk, Σk,πk γ (znk )
Informal EM for GMM
• First choose initial values for means, covariances and mixing coefficients
• Alternate between following two updates
– Called E step and M step
• In E step use current value of parameters to evaluate posterior probabilities, or
responsibilities
• In the M step use these posterior probabilities to to re-estimate means, covariances and mixing coefficients
EM using Old Faithful
Data points and Initial mixture model
Initial E step Determine responsibilities
After first M step
Re-evaluate Parameters
After 2 cycles After 5 cycles After 20 cycles
Comparison with K-Means
K-means result E-M result
Animation of EM for Old Faithful Data
• http://en.wikipedia.org/wiki/
File:Em_old_faithful.gif
#initial parameter estimates (chosen to be deliberately bad) theta <- list( tau=c(0.5,0.5),
mu1=c(2.8,75), mu2=c(3.6,58),
sigma1=matrix(c(0.8,7,7,70),ncol=2), sigma2=matrix(c(0.8,7,7,70),ncol=2) ) Code in R
Practical Issues with EM
• Takes many more iterations than K-means
• Each cycle requires significantly more
comparison
• Common to run K-means first in order to
find suitable initialization
• Covariance matrices can be initialized to
covariances of clusters found by K-means
• EM is not guaranteed to find global
maximum of log likelihood function
Summary of EM for GMM
• Given a Gaussian mixture model
• Goal is to maximize the likelihood function
w.r.t. the parameters (means, covariances
and mixing coefficients)
Step1: Initialize the means , covariances
and mixing coefficients and evaluate
initial value of log-likelihood
µ
kΣ
kπ
kEM continued
• Step 2: E step: Evaluate responsibilities using current parameter values
• Step 3: M Step: Re-estimate parameters using current responsibilities
1
(x | µ , ) ( )=
(x | µ , ))
k k k
k K
j j j
j
z N
N γ π
π
=
Σ
∑ Σ
where
Σknew = 1
Nk γ(znk)(xn −µk
new)(xn −µknew)T
n=1 N
∑
µknew = 1
Nk γ(znk)xn
n=1 N
∑
Nk = γ(znk)
n=1 N
∑
πk
new = Nk N
EM Continued
• Step 4: Evaluate the log likelihood
– And check for convergence of either parameters or log likelihood
• If convergence not satisfied return to Step 2
ln p(X |π,µ,Σ) = ln
k=1
∑
K πkN(xn |µk,Σk)⎧ ⎨
⎩
⎫ ⎬
n=1 ⎭