平均探索情報量とマルチエージェントシミュレーションとの関連
性についての考察
Consideration about the average search information and
multi-agent simulation
堀江幸生
1∗伊藤暢浩
1
幸塚義之
1
園田純
1
Horie Sachio
1Ito Nobuhiro
1Koduka Yosiyuki
1Sonoda Jun
11
愛知工業大学大学院 経営情報科学研究科
1
AICHI INSTITUTE OF TECHNOLOGY Graduate School of Business Administration and
Computer Science
Abstract: Abstract In this paper, we use the urban maps as the urban road networks to illustrate the concept of navigability in networks and investigate how different network topologies influence the average amount of information that is needed to send a signal from one node to another node in the network. Putting our purpose, we analyze representative maps used by RCR simulation and consider the relations of the agent strategy and each maps effectiveness of the disaster management by analyzing relevance with the map information and agents.
1 はじめに
近年世界各地で大規模な自然災害による被害が頻繁 に発生している.これに対して様々な取り組みが為され ている中にRoboCupRescue(以下 RCR)シミュレー ションがある.このシミュレーションは,被災した都 市を,様々な種類の災害や災害救助部隊,市民の振る 舞いを総合的にマルチエージェントシミュレーション する.
この災害シミュレーションの開発を通して,対象とな る地域に有効な防災戦略の検討や,また市民に対する 防災意識の啓発だけでなく,人工知能,情報処理,ロボ ティクスなど多くの分野の研究促進が期待されている.
我々は,このシミュレーションを用いて,予め与えら れた都市の地図情報を解析することによって,様々な 実験を行った結果,エージェントにとって地図上を移 動する能力は,最も根本的で重要な能力であり,この 能力と密接に関係している地図情報の構成要素が道路 ネットワークと建造物であると考えた解析をおこなっ ている[1].
しかしながら,エージェントの評価は,エージェント の存在する環境に依存しており,エージェントの能力
∗連絡先:愛知工業大学大学院経営情報科学研究科
〒 464-0807名古屋市千種区東山通 1-38-1 E-mail: account@domain
を比較することが難しいという課題も明らかになった. そこで我々は,エージェントと地図情報(建造物,道 路ネットワーク)との関連性を解析するなかで,各地 域の特徴と災害救助戦略の関係に注目している.
本研究では,情報ネットワークと道路ネットワーク との類似性に着目した移動のしやすさという観点から, 都市道路ネットワークを定量的に比較する研究[2] を RCR に適用し,そこで用いられた地図の中でも代表的 なものを分析し考察する.
2 マルチエージェントシステムの評
価
ここでは,環境をパラメータとするマルチエージェ ントシステムの評価方法について説明する.
エージェントに関する研究分野では,エージェントの 能力を評価することが大きな課題となっている[3],特 に地図という環境がパラメータとなるマルチエージェ ントシステムの評価も難しい課題である.評価方法が 明確ではないため,エージェントの設計・開発をおこ なっても,それが最適であるかどうか,もしくは有効 であるかどうかを判断することができない,また,複 数のエージェントにおける性能や有効性を比較するこ とができない.エージェントの評価は,エージェント
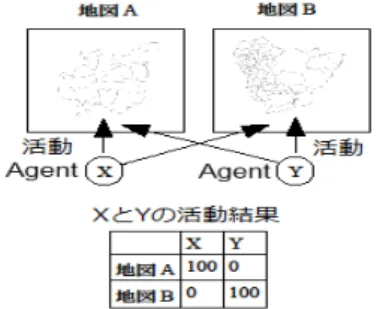
図 1: エージェントと地図との関連性
の存在する環境に依存している.その依存関係を示す 例として,エージェントX と Y が環境 A と B で動 作したとき,その動作結果からX と Y どちらのエー ジェントが優れているかを単純に比較することはでき ない.
例えば,災害救助シミュレーションのような地図を 環境としてもつマルチエージェントシステムでは,環 境である地図の変更によって,エージェントの活動結 果が変化する(図1).すなわち,エージェント同士の 能力を比較するには,エージェントと地図の間に存在 する関連性を明らかにする必要がある.
我々は,これまでも道路ネットワークと建造物の配置 に着目して研究を行ってきた[1][4][5].そこでは,エー ジェントにとって最も重要である移動という行動にお ける困難さを数値化できたが,エージェントと環境の 間の関連性について,十分な説明は得られなかった. そこで本研究では,環境の特徴として平均探索情報 量に着目する.平均探索情報量は,地図上の移動にお いて,どれだけの情報が必要であるかを定量化したも のである.本研究の目的は,この値とエージェントの 活動結果を統計分析することで,エージェントと環境 の間に存在する関連性をより明らかにすることである.
3 平均探索情報量
3.1 平均探索情報量とは
我々が,平均探索情報量を利用する理由を以下に示す.
• 都市分析の分野で注目されている,
• 都市内の移動についての指標であり,その観点か ら都市の複雑さを定義している,
• 災害シミュレーションは移動という行動を伴う, ここでは,平均探索情報量について説明する.
複雑なネットワークは多数の構成要素からなり,ネッ トワーク上の情報がどこからどこに送られるかという ことが重要になる.
Rosvall らは,インターネットや細胞組織のような ネット ワ ー ク に お け る 情 報 の 伝 播 を 説 明 す る た め に , 様々な構造をもつネットワークで,ある地点からある 地点へ向かってどのように情報が伝わるかを考察するに あたって,まずは,ネットワーク全体における情報伝達 にかかるコスト(情報量)に着目して試行した[2][6][7].
彼らは,試行を都市道路ネットワークにも適用した. 都市の中で,道路を歩く人が,ある場所から目的の場 所を見つけるために,実際の移動距離は必要ないと考 え,道路ネットワーク上で目的の場所に移動する場合 に,距離,移動時間をゼロであると仮定した.その仮定 に基いて,何カ国かの都市を例として抜き出して,道 路の結合だけを表すグラフを作成し,その複雑さを定 量化するために,平均探索情報量「S」値 を導入した [2][6][7].
Rosvall らがいうところの複雑さとは,道路から道路 への移動が容易でないことを意味している.
なお,「S」値が高いほど道路ネットワークは複雑にな る,すなわち,目的の場所へ移動するために,より多 くの情報コスト(情報量)が必要となる.それは,情 報コストがかかればかかるほど,「S」値は大きくなる と言うことも意味する.
3.2 道路の結合を表すグラフ
Rosvall らは,道路ネットワークの複雑さを定量化す るにあたり,スペース・シンタックス理論[8][9][10] の 手法と同様に,道路ネットワークから道路間の結合を 表すグラフへの写像をおこなった.
ここで道路ネットワークの定義を以下に示す. 道路ネットワークG = (V, E) は無向グラフである. V ,E について以下のように定義する.
点集合 V
点v (∈ V ) の集合である. 道路集合 E
道路e (∈ E) の集合である.道路とは,点 vhead(∈ V ) から点 vtail(∈ V ) を接続したものである. また道路ネットワークG は,x 軸を経度,y 軸を緯度 としたx-y 直交座標系に配置されるものとする.そし てG の各点 v ∈ V は,直交座標系における座標に配置 される.またG の各道路 e ∈ E は,直交座標系に配置 された点対を結んだ線分である.
ただし,この道路ネットワークG に対して以下の制 約を与える.
図2: 道路ネットワークから道路の結合を表すグラフへ の写像
• 任意の点に対して,その点から出て自身に戻って くるような道路(自己ループ)は存在しない.
• 任意の点対で同方向の複数の道路は存在しない.
• 任意の二点において,一方から他方への経路は必 ず存在する(強連結である).
図2(a) において,左図の 1 の道路を右図において 1 の「点」で示し,同様に左図の2,3,4,5 の道路を右 図の2,3,4,5 の「点」で示している.また,左図の 1 と 2,1 と 3,1 と 4,1 と 5 の交差点を右図で,そ れぞれ「辺」として表している.図2(a) より複雑な道 路ネットワークを図2(b) に示す.
3.3 平均探索情報量の定義
ここでは,平均探索情報量の定義について説明する [2][6].すべての交差点で,等しい確率で道路を選択す るものとして,起点となる道路s から終点となる道路 t に到達する確率P [p(s, t)] は,次式 (1) で表される.k1
s
は出発点での確率, 1
kj−1はs から t へ移動する途中の 各ノードj における確率を表している.kjは,ノード
j の次数である.
P [p(s, t)] = 1 ks
∏
j∈p(s,t)
1 kj− 1
(1)
起点となる道路s から終点となる道路 t に到達する 遠回りしない複数の経路が存在する合計確率P (s → t) は,次式(2) で表される.
ここで,「遠回りしない」とは,起点となる道路s か ら終点となる道路t に到達する経路の中で,「辺」の数 がもっとも少ないことを意味している.
P (s → t) = ∑
p(s,t)
P [p(s, t)] (2)
起点となる道路s から終点となる道路 t に到達する 遠回りしない複数経路の合計確率から求めうる情報量 S(s → t) は,次式 (3) で表される.
S(s → t) = −log2 ∑
p(s,t)
P (s → t) (3)
すべての起点とすべての終点についてS(s → t) の和 をとって,始点終点の数N で割ったものが「S」値で あり,次式(4) で表される.
S = 1 N2
N
∑
s=1 N
∑
t=1
S(s → t) (4)
さらに,起点となる道路s から終点となる道路 t に 到達する遠回りしない複数経路群を「代替経路」と定 義し,APs,tと表す.
なお「代替経路」とは別に「縮退経路」[2][6] という 定義もあるが,これは,起点となる道路s から終点と なる道路t に到達する遠回りしないことがわかったう えで選択される複数経路群のこととする.
4 諸定義
ここでは,「S」値による分析に必要な諸定義をおこな う.はじめに,これまでに定義された道路ネットワー クの複雑さの指標のうち,本研究で必要な指標を再定 義する.
最短経路距離: 最短経路距離は,2 点間の距離の最小 値を表すものである.そして全点対の最短経路距 離の平均値が小さいほど,その道路ネットワー クにおいて,任意の点までの距離が小さいことを 意味する.
区画整理率: この値が大きいほど,その道路ネットワー クには道路と道路の角度x が 90 度もしくは 180 度に近いものが多いことを意味する.つまり,そ の道路ネットワークが碁盤目状に近いことを意味 する.ただし,ある角度から±15 度以内を,そ の角度に「近い」と言うことにする(75
◦≤ x ≤ 105◦, 165◦≤ x ≤ 195◦).
距離に対する直進率: 距離に対する直進率は,2 点間 の最短経路距離に対して直進できる割合を表すも のである.全点対の距離に対する直進率の平均値 が大きいほど,その道路ネットワークには距離に 対して直進できる割合が高い最短経路が多く存在 することを意味する.
道路使用回数率: 道路使用回数率は,その道路が最短 経路を構成する道路として何回使われたかを表
すものである.道路使用回数率の最大値が大きい ほど,通行止めなどになったら道路ネットワーク を分断させてしまう可能性が高い道路が存在する かどうかを意味する.他の計算項目のように平均 値ではなく最大値を用いた理由は,すべての道路 の道路使用回数率を平均すると,どの道路ネット ワークも同じような値になり,重要な道路の存在 を知ることが難しいからである.
本研究と関連する道路ネットワークの定義,複雑さ の指標は,上記のようになされているが,本研究では,
「S」値による分析をおこなう.そこで,新たな定義「通 り」を追加する.「S」値は,欧米の道路ネットワークに 対して定義されているため,本研究で利用する日本の 道路網を対象とする場合には「通り」の定義が必要と なる.
欧米と日本では,道路に対する考え方の差がある.道 路を中心とした住所を前提とする欧米,例えば,ドイ ツでは,日本のように住宅が並んでいながら車も通れ ないような道はまったくない.また,そのような道路 がある場合でも,接続する広い道路に名称的に含める という方法で解決している道路構成となる.しかしな がら,日本の道路は非常に狭く込み入っており,住所 は番地を前提としている.このため,日本で,「S」値を 求めるには,「通り」を定義する必要があった.
この「通り」を用いて道路ネットワークを次のよう に定義する.
通り: 本研究では,[11] の手法より導かれる「通り」の 定義を行なった.これは,本研究においても,道 路のつながりに着目し,「辺」と「辺」をつないで いき,1 本の「道路」として捉え,1 つの番号を 与える作業が必要になるからである.RCR で用 いられる地図情報の構成は,「点」と「辺」それぞ れに1 つ 1 つ識別子が与えられているが,道路 として,どこまでを 1 つながりとするかは,そ のままでは判断できない.そこで,1 つながりの 道路のことを,「通り」と定義する.
「通り」とは,以下の条件より抽出された,1 つ の番号を与えられる「道路集合」の部分集合で ある.
本研究では,[11] の手法より,次数 3,または 4 の方向について,それぞれ方向ベクトルA⃗iを求 める(次式(5)).
A⃗i= (xi, yi), 1 ≤ i ≤ 4 (5) その内積の絶対値IP は次式 (6) で表される.こ のIP が最大になる 2 つの「辺」を同一の「通 り」に含まれるものとし,これらを繋げた全体が
「通り」である(図3).
図 3: 通り
IP = xi× xi+1+ yi× yi+1
√x2i + yi2/√x2i+1+ y2i+1, 1 ≤ i ≤ 3 (6)
また,「通り」を求めるにあたり,端となる始点が 見つからない(閉路が存在する)場合は,閉路を 構成する「点」のひとつを始点とする.この時, 終点は,一度「通り」として抽出された「点」に 到達した,その「点」とする.
このように新たに定義した「通り」を用いて,本研究 では,「S」値と,マルチエージェントシミュレーション におけるエージェントやマルチエージェントシステム の評価との依存関係について分析を行う.分析は,統 計的に相関を導出した.
5 ロボカップレスキューシミュレー
ション
RCR シミュレーションシステムとは,大震災時にお ける災害空間と,災害空間上で行われる災害救助活動 について検証することができるシミュレーションシス テムである.RCR シミュレーションは,ネットワーク を介して接続された複数のモジュールから構成される 実時間分散シミュレーションシステムである.
5.1 RCR シミュレーション
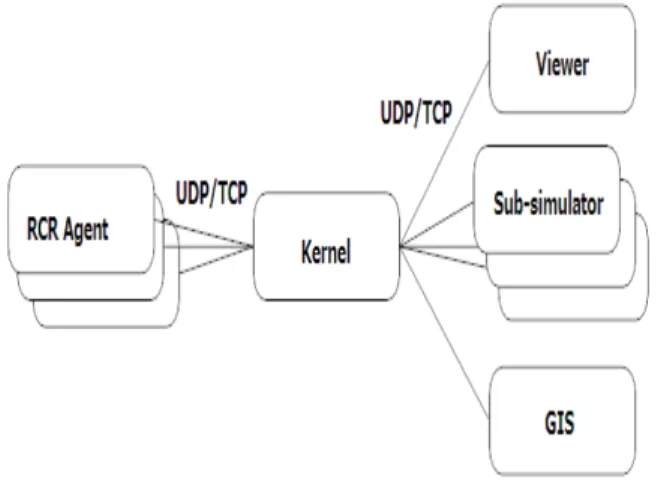
図4 における,RCR シミュレーションを構成する各 モジュールの名称と役割を以下に示す.
• Kernel : モジュール間の通信とシミュレーション 全体を管理する.
• GIS(地理情報システム) : 初期設定ファイルを読 み込み,災害空間の初期化を行う.
• Viewer : シミュレーションの進行状況を視覚化 する.
図4: RCR シミュレーションシステム
• Sub-simulator : 複数の災害現象を専用のサブシ ミュレータでシミュレートする.
– Fire Sub-simulator : 火災の発生や延焼をシ ミュレートする.
– Blockades Sub-simulator : 建物の倒壊によ る道路閉塞をシミュレートする.
– Collapse Sub-simulator : 建物の倒壊をシ ミュレートする.
– Civilian Sub-simulator : 震災時における市 民の行動をシミュレートする.
– Misc Sub-simulator : 市民の埋没度・体力 の計算や,エージェントからのコマンドの 処理などを行う.
• RoboCupRescue(RCR) エージェント : 災害空間 に存在するエージェント.
5.2 RCR エージェント
RCR エージェントとは,災害救助をおこなう人々や, その人々を統括する指令所,そして市民をモデル化し たものであり,以下の六種類に分類することができる. 彼らは,システムから受け取った視覚情報をもとに周 辺の状況を認識し行動決定する.また,非同期で他の RCR エージェントと通信をおこなう.
• 救急隊:建物の倒壊により埋没した市民を救助 する
• 消防隊:発火した建物に対する消火活動を行う.
• 道路啓開隊:建物の瓦礫により閉塞した道路を啓 開する.
• 救急指令所:救急隊に指令を出す.
• 消防指令所:消防隊に指令を出す.
• 道路啓開指令所:道路啓開隊に指令を出す.
5.3 シミュレーションにより得られるデータ
シミュレーションの結果として,得ることができる データを以下に示す.
評価点数: 災害救助活動の結果を点数化したものであ り,次式(7)によって計算される値である.た だし,P は災害救助活動後に生存しているエー ジェントの数,S は災害救助活動後におけるすべ てのエージェントの残りの体力,Sint は災害救 助活動前におけるすべてのエージェントの体力の 合計,B は災害発生後に燃え残った建物の面積, Bint は災害発生前におけるすべての建物の面積 である.
V = (
P + S Sint
) √ B
Bint (7)
評価点数率: 評価点数では,異なる地図データ間でエー ジェントの災害救助活動の評価を比較することが できない.なぜならシミュレーションをおこなう 地図データにおける災害空間の初期設定に応じて エージェントの数や建物の数は異なり,それに伴 い評価点数も変化するためである.そこで,異な る地図データ間でエージェントの災害救助活動の 評価を比較するために,次式(8)で求まる評価 点数率V
′
を定義する. V′ =
( V Srate
)
(8)
ただし,V は評価点数であり,Srateは,
Srate= Sthis Smin
(9)
である.ここで,Sthisはそのシミュレーション で使用した地図データの面積,Sminは比較する 複数の地図データの中で最も面積が小さい地図 データの面積である.災害空間の初期設定におい てRCR エージェント,建物,避難所そして発火 点の数を地図データの面積比に応じて決定する. そしてこの評価点数率を用いることにより,異な る地図データの間でも災害救助活動の評価を比較 することができると推測できる.なぜなら,単位 面積に注目すると,道路ネットワーク以外の地図 データの条件がほぼ一定になると考えられるから である.
消火率: 発火した建物の延べ床面積に対する消火した 建物の延べ床面積の割合である.消火率Erateは 次式(10)により計算される.
Erate= Sexti Sf ire
(10)
ただし,Sextiは消火した建物の延べ床面積であ
り,Sf ireは1 度でも火がついた建物の延べ床面
積である.
救助率: 建物の倒壊により埋没した移動エージェント に対する救助した移動エージェントの割合である. 救助率Rrateは次式(11)により計算される.
Rrate= Nresc Nbury
(11)
ただし,Nrescは救助したRCR エージェントの 数であり,Nburyは災害発生時に埋没したRCR エージェントの数である.
道路啓開率: 閉塞した道路に対する啓開した道路の割 合である.道路啓開率Crateは次式(12)により 計算される.
Crate= Nclear NBlock
(12)
ただし,Nclearは啓開した道路の数であり,Nblock
は災害発生時に倒壊した建物の瓦礫により閉塞し た道路の数である.
なお,RCR シミュレーションでは,RCR シミュレー ションリーグの競技会で使用されている地図データと, 国土地理院の数値地図25000,OSM(OPEN STREET MAP)を使用することができる [12].
6 分析と結果
6.1 分析方法
本研究の目的は,「S」値と地図データを環境とするマ ルチエージェントシミュレーションとの関連性を,重 回帰分析をおこない考察することである.
はじめに,分析データについて説明する.本研究に おける分析データは,以下に示す[1][4] の成果と同じも のを利用する.
6.1.1 地図データ
本研究で選択した地図データの名称と面積,特徴に ついて以下に示す.ただし,括弧の中は,評価点数率 やシミュレーションパラメータの設定の際に使用する 各地域の面積である.
岩手県東磐井郡川崎村(42.49m2)
• 道路使用回数率が高い
• 区画整理率,距離に対する直進率が低い 東京都荒川区(10.20m2)]
• 距離に対する直進率が最も高い
• 最短経路距離が短い 新潟県山古志村(39.83m2)
• 最短経路距離が長く,道路使用回数率が高い
• 区画整理率が低い
兵庫県神戸市長田区(11.48m2)
• 距離に対する直進率が高い
• 最短経路距離が短い 鳥取県境港市(28.79m2)
• 区画整理率が最も高い
• 道路使用回数率が最も低い 福岡県嘉穂郡碓井町(8.45m2)
• 区画整理率がやや高い
• 道路使用回数率が低く,最短経路距離が最も短い すべての地図データに対して,シミュレーションパ ラメータ(災害空間の初期設定)は,以下のような方 針の基づいて設定した.
• 評価点数率を用いて異なる地図データ間で災害救 助活動の評価を比較するために,任意の地図デー タで単位面積に配置するRCR エージェント,避 難所,発火点,建物の数を等しくする.
• あらゆる規模の災害にも対応できるように最も被 害が大きくなる状況を想定する.
6.2 RCR エージェント
(a) YabAPI
RCR シミュレーションの競技会で,RCR エージェン トのベースとして用いられているエージェントである. YabAPI の災害救助活動の特徴を以下に示す.
• 消防隊は避難所を拠点として移動し,火災を発見 するとその地点に向かい消火をおこなう
• 救助隊は自分の最寄りの建物から順番に建物内を 調べ,埋没した市民を発見すると救助をおこなう
表1: 各地図データに対する YabAPI の災害救助活動の評価
地図データ名 川崎村 荒川区 山古志村 長田区 境港市 碓井町 消火率Erate 0.01384 0.001155 0.006225 0.0001098 0.001426 0.000 救助率Rrate 0.3776 0.1352 0.3357 0.1923 0.28312 0.3107 道路啓開率Crate 0.03993 0.0001976 0.000 0.0007190 0.004163 0.01000 最終評価点数率Vend′ 24.97 21.58 22.90 22.09 24.09 25.93
表2: 各地図データに対する YowAI の災害救助活動の評価
地図データ名 川崎村 荒川区 山古志村 長田区 境港市 碓井町 消火率Erate 0.05657 0.0006712 0.02727 0.0001389 0.008907 0.01062 救助率Rrate 0.4655 0.02170 0.52062 0.01322 0.07851 0.1189 道路啓開率Crate 0.11738 0.00014 0.07917 0.001509 0.008743 0.01110 最終評価点数率V
′
end 26.36 22.50 24.78 20.39 23.59 24.58
• 道路啓開隊は消防隊,救助隊からの要請を受けて 道路啓開をおこなう
さらに本研究では,[4] のシミューレーション結果を 利用した(表1).
(b) YowAI2003
電気通信大学がRoboCupRescue2003 の競技会に出場 させたエージェントである.YowAI の災害救助活動の 特徴を以下に示す.
• 消防隊は火災を発見するとその地点に向かい消火 をおこなう.火災を発見していない状態では,火 災を発見するために災害空間を巡回する
• 救助隊は救助隊同士で情報交換をおこない,分担 して建物内を調べ,埋没した市民を捜索する.埋 没した市民を発見すると,複数の救助隊が集まり 協力して救助をおこなう
• 道路啓開隊は消防隊,救急隊からの要請に加え, 道路啓開隊同士でも情報交換をおこない,最適な 啓開地点を判断して道路を啓開する
ここでも,本研究では,[4] のシミューレーション結 果を利用した(表2).
6.3 「 S」値の算出
道路ネットワークは,「通り」の数に応じて「S」値が 大きくなる,すなわち複雑(移動が困難)になる傾向 にある(表3,図 5).
なお,「S」値と「通り」の相関係数は 0.97 であった
(表4).
一般に、2 つの変量間の相関係数の絶対値が 0.2 以 下であればほとんど相関がないといい,0.7 以上あれば 強い相関があるという.しかしながら,標本数が少な
図 5: 「S」値による比較 (a)
ければ偶然によって相関係数が高い値を示すこともあ る.このため,標本数を考慮したうえで母集団の相関 の有意性を判定する必要がある.ここでは,相関係数 の有意性判定の方法として標本数の大小にかかわらず 適用できる t 検定を用いた.相関係数 r,標本数 n を 用いての統計量t は,次式 (13) で求められる.
t = r
√n − 2
1 − r2 (13) このt は自由度 n − 2 の t 分布に従うことが知られ ている.危険率(片側)を5%としたときの棄却限界値 を求め,t > 棄却限界値 であれば危険率 5%で有意な 相関があるといえる.ここで,「S」値と「通り」の相関 は,棄却限界値= 2.13 に対して,統計量 t は 7.88 と なり有意であった.
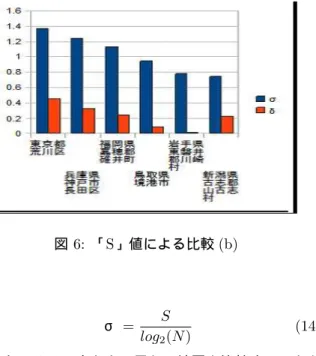
ここで図6 の「σ 」値は,「点」の数に関係なく複雑 さを定量的に同じ尺度で計るために,「S」値を,底を 2 とする対数をとった「点」の数 N で割った値であり, 次式(14)で表される.
図6: 「S」値による比較 (b)
σ = S
log2(N ) (14) これにより,大きさの異なる地図を比較することが 可能になるので,本研究では,この「σ 」値を考察に 用いる.
なお,図5 の「Sr」 値は,全点の次数総計から,ラ ンダムに各点へ「辺」を割り当てたランダムグラフの
「S」値であり,道路ネットワークの計画性を各都市で 比較する目的で算出されたが,「S」値と同様な傾向を 得た.この「Sr」値におけるランダムグラフは, 厳密 に言えばRosvall らの用いたランダムグラフ生成手法 とは異なる手法で生成されている.彼らは,各点にお ける次数を揃えたが,ここでは,全点の次数総計から, ランダムに各点へ「辺」を割り当てた.また,図6 の
「δ 」値は,計画的な道路ネットワークかそうでないか をわかりやすくする値であり,次式(15)で表される.
δ = (S − S
r)
log2(N ) (15) これら,「Sr」値と「δ 」値は,Rosvall らの研究結果 で算出されていたことから,ここでも算出したが,本 研究では日本における道路の成立事情を考慮して用い なかった.
表 3: 「通り」と「S」値
「通り」の数 S 荒川区 208 10.57 長田区 129 8.68 碓井町 72 6.96 境港市 30 4.63 川崎村 16 3.13 山古志村 13 2.77
表4: 「S」値と「通り」の相関 相関係数 0.97 統計量t 7.88
6.4 「 S」値による分析と考察
ここでは,「S」値による分析と考察をおこなう.
表 5: 災害救助活動の評価と平均探索情報量「S」値の 相関係数
消火率 救助率 道路啓開率 評価点数率 YabAPI -0.73 -0.91 -0.48 -0.45
YowAI -0.79 -0.88 -0.83 -0.75
表5 より,YabAPI ,YowAI ともに,[4] のシミュー レーション結果と同様に,「S」値が低いほど,救助率が 高くなっていることがわかる.また,「S」値が低いほ ど,他の災害への対応効率(消火率,道路啓開率,評 価点数率)も高い,すなわち,災害救助隊がそれぞれ の目的によって行動すべき地点へ移動することが容易 になると仮定できる.
しかしながら,YabAPI と YowAI の結果を比較す ると,エージェントの振る舞いによる差異から,相関 の強弱に差異が認められたので,「S」値との相関係数 の検定値を比較した.
YabAPI の道路啓開率,評価点数率とは,棄却限界 値= 2.13 に対して,統計量は,それぞれ,1.09 ,1.01 と となり有意でなかった.また,YowAI においては, すべての災害への対応効率(消火率,救助率,道路啓開 率,評価点数率)が,有意であった6.このことは,「S」 値が低いと,災害救助隊が救助すべき市民がいる地点 へ移動することが容易になるという仮定の正否は,エー ジェントの戦略に依存するということを示している.
表6: 「S」値における相関係数の有意性(統計量) 消火率 救助率 道路啓開率 評価点数率 YabAPI 2.15 4.29 1.09 1.01
YowAI 2.60 3.70 2.96 2.29
2 種類のエージェントで,「S」値と災害への対応効率
(消火率,救助率,道路啓開率,評価点数率)への関係 性が異なるのは,RCR のサンプルエージェントである YabAPI が,戦略と言う程の戦略を持たないことが理 由と考える.言い換えると,YowAI のほうが YabAPI に比べて道路を有効に利用し移動する能力が高く,道 路を利用する効果が現れていると言うことができる. これより,地図の複雑さ(移動の困難さ)に関わら
ないような,エージェントの戦略が存在する可能性を 示すことができた.
表7: 「S」値とこれまでの道路ネットワークの複雑さ の指標(最短経路距離)の相関
相関係数 -0.88 統計量t 3.79
本研究ではさらに,これまでの道路ネットワークの 複雑さの指標と「S」値との関係を分析した(表 7)が, 最短経路距離と「S」値は,強い負の相関となった.こ れは,距離が短いほど,「S」値 が高いと言うことがで きる.
この結果は,「S」値 が高いならば,「通り」の構成が複 雑であり,「通り」の選択肢が増え,目的地までの「点」 の数は同じでも,より短い距離で移動できる可能性が 高くなるので,最短経路距離は短くなると説明できる. すなわち,「S」値 が高いならば,選択肢「代替経路」 が増える分,最短経路距離はより短くなると言うこと ができる.本研究における「S」値を求める式から導か れる「S」値と「代替経路」の数は比例していた,さら にRosvall らの「縮退経路」を含む「S」値を求める式 から導かれる「S」値よりも,本研究における式による
「S」値は低い.これは,「縮退経路」の方がより多くの 情報を知る必要があると考える.
上記の考察を踏まえて本研究では,「S」値が,災害 への対応効率(消火率,救助率,道路啓開率,評価点 数率)と関連があると考え,地図における道路ネット ワークの複雑さの指標として有意であるとする.
ただし現実的な問題として,災害時に道路を歩く人
(エージェント)が,ある場所から目的の場所に移動す るには,体力の消耗なども鑑み,実際の移動距離など も「S」値に導入することも検討していく必要があると 考える.
7 まとめと課題
本研究では,「S」値 と言う定量化された値を算出し, どのような道路ネットワークが複雑な道路ネットワー クであるのかを示した.
さらに算出された値を分析し結果は,「S」値と災害へ の対応効率との関連性を明らかにし,「S」値を道路ネッ トワークの複雑さの指標のひとつとして加える必要性 も示した.
また,異なる環境で有効に働くようなエージェント の戦略が存在する可能性を示した.
なお,本研究では,「S」値の算出に [11] によるプロ グラムを改良し,RCR で用いられる地図から自動的に
抽出可能なプログラムを作成した.このとき,RCR で 用いられる地図から,「通り」を抽出する部分の実装は, 地図情報の構成が数値地図2500 とは異なっており,困 難で非常に時間がかかった.
今後の課題として,プログラムに関連する課題では, プログラムを5 差路以上ある交差点についても定量化 を可能とするとともに修正点を見つけ改良し,より多 くの地図データで比較しなければならない.また,エー ジェントの戦略に着目すれば,エージェントの戦略の 違いが,任意の交差点における「通り」を選択する確 率を変化させるような場合の災害における対応効率の 変化を調査したい.
さらに,「S」値を算出するにあたって「通り」である
「点」に何らかの重みを導入することも検討していく必 要があると考える.
謝辞
終始熱心なご指導を頂いた伊藤暢浩准教授,プログ ラムの実装や助言を頂いた幸塚義之氏,園田純氏に感 謝の意を表します.
参考文献
[1] 瀬戸口陽一,道路ネットワークの複雑さと移動型 エージェントシミュレーションとの依存関係につい て,名古屋工業大学,平成19 年度修士論文,2007 [2] M. Rosvall, A. Trusina, P. Minnhagen, and K.
Sneppen, Phys.Rev. Lett. 94, 028701 (2005) [3] Ramchurn, S., Farinelli, A., Macarthur, K.,
Polukarov, M. and Jennings, N. Decentralised Coordination in RoboCup Rescue. The Com- puter Journal(2009)
[4] 金田洋平,道路ネットワークの複雑さとマルチエー ジェントシステムに関する研究,名古屋工業大学, 平成17 年度修士論文,2005
[5] 瀬戸口陽一,荒井亮太,伊藤暢浩,岩田員典,金 田洋平,犬塚信博,和田幸一,道路ネットワーク の複雑さとマルチエージェントシミュレーション との関連性についての考察,2007
[6] M. Rosvall, A. Gronlund, P. Minnhagen, K. Sneppen, Phys. Rev. E 72, 046117 (2005) [7] M. Rosvall, A. Trusina, P. Minnhagen, and K.
Sneppen, Phys.Rev. E 71, 066111 (2005)
[8] Jiang B, Claramunt C, ”Topological analysis of urban street networks” Environment and Plan- ning B: Planning and Design 31(1), 2004 [9] Hillier and Hanson, The social logic of space,
1984
[10] 高野裕作,Space Syntax を用いた街路パターンの 構造分析と街並の特性に関する研究−世田谷区東 部の密集市街地を対象として−,早稲田大学平成 18 年度卒業論文,2006
[11] 神川豪,豊木博泰,都市道路ネットワークの複雑 さの定量化,山梨大学平成18 年度卒業論文,2006 [12] Moritz G¨ obelbecker, Christian Dornhege, Real- istic cities in Robocup Rescue - An Open Street Map to Rescue Converter,Rescue simulation in- frastructure TDP, CD-ROM(2009)