運転支援システムのための
形式文法による運転行動のタスクラベリング
On Task Labeling Method of Driving Behavioral Data
Based on Formal Grammar for Driver Assistance System
山崎啓介
1∗本村陽一
1Keisuke Yamazaki
1Yoichi Motomura
11
産業技術総合研究所 人工知能研究センター
1
Artificial Intelligence Research Center,
National Institute of Advanced Industrial Science and Technology
Abstract: Analysis of driving behavioral data is recently developing and recognized as a nec- essary technique for driver assistance system. A driver model based on the analysis is used for understanding and predicting the behavior of drivers. In the present study, we propose dividing the driver model into two parts: a task model and a user model. The task model objectively expresses how driving tasks occur according to the geographic infromation and the traffic environment while the user model shows how the driver perceives the environment and makes decisions. We also show formulation and labeling of driving tasks based on formal grammars in the task model.
1 はじめに
近年のセンサー技術の向上とデータ分析手法の発展 にともない,運転の行動記録データが計測・蓄積され 多様なアプローチにより分析が行われている.運転支 援システムではドライバの行動を理解または予測する ことで安全性や信頼性の向上が期待できるため,ドラ イバモデルの構築が必要不可欠な技術として盛んに研 究されている.
ドライバモデルには様々な用途が考えられる.例え ばドライバの行動特性に対応したエンジンなどの車両 そのものの性能向上,先進運転支援システム(ADAS) に代表されるドライバの行動を補完する車両の制御,ド ライバの心理状態や感性など人間工学的を利用した付 加価値の向上が挙げられる.このように目的が多様と なるためモデリングに必要なデータ項目やアプローチ がそれぞれ異なり,標準的なモデル表現や構築法が確 立されていないという問題がある.そのためモデリン グに関する知見や知識の共有がされづらい状況にあり, 運転支援システムのみならず自動車 AI の発展の足枷に なることが危惧される.
そこで本研究ではドライバモデルの用途に依存しな い共通のデータ処理を集約し,標準的なモデル構築方
∗連絡先: 産業技術総合研究所 人工知能研究センター 〒 135-0064 東京都江東区青海 2-3-26 E-mail: [email protected]
法を確立することを目的とする.具体的にはこれまで ドライバモデルとされていた部分をドライバの個性や 運転特性を表現するユーザモデル,運転を行う際に生 じる課題を表現するタスクモデルの 2 つに分割したモ デル構成を提案する.さらにタスクモデルによる運転 行動のラベリングを用途に依存しない処理と位置付け, ドライバの知覚,判断や個人特性などに影響されるユー ザモデルと区別することで,客観性を備える運転動作 の定式化とデータへのラベル付与の手法を示す.
2 ユーザモデルとタスクモデル
ドライバは運転時における周囲の環境から情報を取 得しながら意志決定を行い,運転行動を継続するエー ジェントとみなすことができる.ドライバモデルはこ のようなエージェントの機能をモデル化したものであ り,「環境からドライバモデルへの情報」と「ドライバ モデルから環境への作用」という双方向の関係を有す る.ドライバモデルの用途によりこの情報と作用の種 類が決定されるため,必要とされるデータ項目やモデ ル表現が多様となる.
本研究では従来のドライバモデルをユーザモデルと タスクモデルの 2 つの構成要素に分離することを提案 する (図 1).ユーザモデルとはドライバがどのような 状況認識・意思決定をしているかを表すモデルであり,
図 1: ドライバモデルの構成:ユーザモデルとタスクモ デルに分離
ドライバの経験や運転能力など個人の特性に依存する 要素を扱う.例えば対向車が通過する道路で右折を行 う状況下においてそのタイミングを決定するユーザモ デルは,対向車の通過頻度が同じであってもドライバ によってその判断は異なる.一方,タスクモデルとは 場所や状況に応じてどのような運転操作の需要が発生 するかを表すモデルであり,環境が固定されていれば ドライバに依存しない要素を扱う.よってタスクモデ ルは,環境からタスクへの写像を定義するものとみな すことができる.
3 形式文法によるラベリング
ここではタスクラベリングの重要性,および形式文 法によるラベリング手法について述べる.
3.1 車載センサーデータとタスクラベリング
車載センサーデータはステアリングやペダルの操作 履歴,速度や加速度など車両の状態を表す電気信号の 集まりであるため,これらの信号がいかなる運転動作 の結果として出力されたものかが明確ではない.例え ばアクセルとブレーキのペダル使用状況を表す信号は オンとオフがそれぞれのペダルに関して時系列に並ん だものであるが,これだけからはドライバに課せられ たタスクを知ることは容易ではない.アクセルによる
「加速」,ブレーキによる「減速」,両方のペダルを離 している「惰性走行」というラベルが付くことにより 動作の理解が深まるとともに,位置情報を基に地図上 で動作ラベルを可視化することで,その動作を行った 状況や理由を推測することが可能になる.また動作ラ ベルの付与により,特定の行動をとる地点を検索した りラベルの順序から行動パターンを割り出すなど可視 化以上の高度な情報処理が実現できる.
ユーザモデルはドライバの認知や判断を扱うが,そ れは入力である「状況」と出力である「行動」のペアを データとし,その間の関係性を表す関数のモデル化と 捉えることができる.つまりユーザモデル構築にはペ
図 2: 提案手法:データの離散化と構文解析によるラベ リングから構成される.
図 3: 速度の離散化:一定時間内の平均速度について 4 つのカテゴリーに分割.
アの一部である「行動」が必要不可欠である.しかしな がら車載センサーデータにはこの行動の結果の電気信 号が記録されているのみであり,明確な行動を示す情 報を直接抽出することができない.電気信号から行動 を解釈する役目を果たすのがタスクモデルであり,い かなる用途のドライバモデリングにおいてもタスクモ デルの構築は共通して最初に行われる前処理的なデー タ分析である.よって標準的なタスクモデリング手法 を確立することが,多くの自動車 AI 開発で行われてい るであろう作業の重複をなくし,開発の加速と効率化 に繋がると考えられる.
3.2 形式文法によるラベリング手法
本研究で提案するタスクラベリング手法は車載セン サーデータの離散化するプロセスと,それにより記号化 されたデータを形式文法により構文解析するプロセス の2つからなる (図 2).まず離散化のプロセスについて 説明する.ここでは数秒単位での時間間隔を設け,その 間の動作について記号化を行う.例えば車両速度の離散 化では一定時間内の平均値を計算し,それが 10[km/h] 以下,30[km/h] 以下,60[km/h] 以下,それ以上の速度 の 4 つのカテゴリーに分割する.図 3 は運転行動デー タベース [1] の走行データに対し,4 つのカテゴリーを 基に記号化を行い地図上に可視化したものである.右 折の直後に左折を行う経路であるが,60[km/h] 以上の 走行から右折の段階で徐行に入り再び加速した後,低 速で左折する様子がわかる.
さらに同地点におけるステアリングとペダル操作の 離散化の結果を図 4 と図 5 にそれぞれ示す.ステアリ
図 4: ステアリング操作の離散化:右左折と直進の 3 つ のカテゴリーに分割.
図 5: ペダル操作の離散化:加減速と惰性走行の 3 つの カテゴリーに分割.
ングでは操舵角に閾値を定め,左折と右折とそれ以外
(直進)の 3 つのカテゴリーに分割した.またペダル操 作ではアクセルペダルとブレーキペダルの踏み込み量 に閾値を定め,加速と減速とそれ以外の惰性走行の 3 つに分割した.
次に図 2 の右側に示される構文解析によるタスクラ ベリングのプロセスについて説明する.前段階での離 散化により車載センサーデータは記号列となる.記号 列を受理しラベルを付与するための形式文法 [2] には Chomsky階層 [3] など様々なクラスが考えられる.本 研究では比較的表現力が高く構文解析に広く用いられ る文脈自由文法により定式化を行う.文法を表現する にはいくつかの方法があるが,ここではバッカス・ナ ウア記法(BNF)[4] に基づく構文図 [5] を利用する.
汎用的なタスクモデルを構築するためには,ユーザ モデル部分に依存しない標準的なラベルを定める必要 がある.どのようなタスクが標準的かはドライバモデ リングを用いる自動車 AI 開発者間での合意の下で選定 されるべきであるが,本研究では初めての試みとして ペダル操作について最も単純なラベルをいくつか定式 化する.
図 6 は「加速」のラベルの文法を構文図で表現して いる.凡例は図 5 と同様で,アクセルペダルが踏まれて
図 6: ラベル「加速」の文法
図 7: ラベル「再加速」の文法
いる状態が上向き三角,ブレーキペダルが踏まれてい る状態が下向き三角,どちらのペダルも踏まれていな い惰性走行が四角である.構文図は惰性走行の記号が 1回以上繰り返された後,アクセルペダルが踏まれて いる状態が 1 回以上連続することを表現している.記 号化されたデータ内でこの順番の記号列に合致する箇 所に「加速」のラベルを付与する.これと同様にラベ ル「再加速」は図 7,「減速」は図 8,「急な減速」は図 9 で示される. 「急な減速」はアクセルペダルを踏んだ 直後にブレーキペダルを踏む動作を表現している.
4 実データへの適用例
運転行動データベース [1] の走行データに対し前章で 定式化したラベルを付与した結果を示す.今回注目し たのはペダル操作のみであるため走行データは 1 次元 の記号列となり,単純な文字列検索によりそれぞれの ラベルに該当する箇所を抽出することが可能であった.
「加速」,「再加速」,「減速」のラベルが付与された地 点の例を図 10∼12 に示す. 「急な減速」のラベルは いわゆる急ブレーキを意味しており,今回のデータで は 2 つの地点で付与された.地図上では図 13 上部で示 される地点である.運転行動データベースには走行中 の動画も同時に収められており,これらの地点に対応 する動画のスクリーンショットが同図下部である.左側 の地点では自転車の横断が,右側では側道からの車の 進入が原因で急な減速を行ったものと考えられる.こ れらから提案手法により急ブレーキ地点の抽出が可能 であることがわかる.急ブレーキはドライバの主観に 基づく動作であるが,ここでは急ブレーキを誘発する タスクが起こったことの抽出であることに注意された い.つまり上記の結果は運転行動として客観的に得ら れた危険動作箇所に対し,動画で確認を行いその理由 付けをしたものであり,ドライバの主観的な認識によ る危険因子をモデルに取り込んでいるわけではない.
図 8: ラベル「減速」の文法
図 9: ラベル「急な減速」の文法
図 10: ラベル「加速」が付与された地点の例
図 11: ラベル「再加速」が付与された地点の例
図 12: ラベル「減速」が付与された地点の例
図 13: ラベル「急な減速」が付与された 2 つの地点
(上)と動画のスクリーンショット(下)
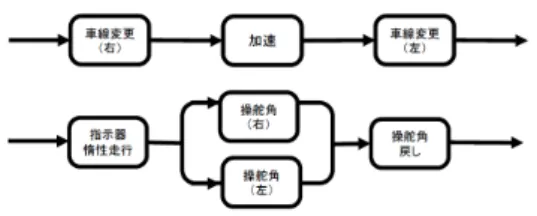
図 14: タスクの階層性:「追い越し」動作(上)と「車 線変更」動作(下)
5 考察と今後の課題
まずタスクラベリングにおいて形式文法を用いる理 由について考察する.運転行動タスクは本研究で付与 した単純なものからより複雑なものまで階層的に存在 する.例えば「追い越し」動作は図 14 の上部にある ように,追い越し車線へと元の車線への 2 回の「車線 変更」を含む.その「車線変更」動作自体は同図の下 部のとおり指示器点灯や操舵角の変化などのより基本 的な動作からなる.この例のように追い越しのような 複雑な動作はより基本的な動作のモジュールの集合と して定義でき,タスクが階層性を有することがわかる. よってタスクを表現するモデルは階層構造を実現でき る必要がある.形式文法はこの階層構造を表現するの に適している.さらに構文図のようなグラフィカル表 示を用いることで可読性を上げることができる.構文 解析は非常に汎用的な処理としてコモディティ化され ておりツールとしての知見が蓄積されているため,高 次元連続データを処理する高度な機械学習の処理と比 較して,扱いやすくかつ理解しやすいという利点があ る.また文法規則の比較や複雑さについて指標が定義 できることから運転タスクの類似度や難易度を定量的 に評価が可能となる.
次に複雑なタスクラベルの定式化について考察する. 本研究ではペダル操作における基本的な運転タスクに ついて定式化を行った.前述の「追い越し」ラベルの例 のように,複雑なタスクの形式文法を定義するには基本 的なタスクラベルを新たに記号として追加しモジュー ル化を行う.さらに速度やステアリング操作などペダ ル操作以外の項目を組み合わせることで多様なラベル の定義が可能である.各項目について離散化による記 号列が得られている場合,これら複数の項目を組み合 わせて記号を構成する方法には次の 2 つが考えられる.
1. 同時刻における複数項目をまとめて新たな記号と する.
2. 1つ以上の項目の組み合わせを新たな記号とする. 項目が 2 つありそれぞれ A, B と a, b の 2 種類の記号で 表されている例を考える.前者の方法では新たな記号
W = (A, a),X = (A, b),Y = (B, a),Z = (B, b) を 導入し,これらで以下のように文法を定義する.
W → X → Z.
後者の方法では新たな記号は作成せず,組み合わせに より文法を定義する.上述の文法は
(A, a) → (A, b) → (B, b)
のように表現される.組み合わせは 1 つ以上なので別 の例として
(A, a) → a → B
のような定義も可能である.これを前者の例で表すと X→ W |Y → Y |Z
となる.ここで記号 x|y は「x または y」を意味する. これらの例からわかるとおり上記の 2 種類の表現能力 は等価である.前者は複数項目が全て論理積として表 現され,後者は表記されていない項目が論理和として 表現されている.タスクラベルの定義に応じて可読性 の高い表記方法を選択すべきである.具体的にどのよ うなタスクラベルが必要か,どのような定式化が妥当で どちらの記号表記を用いるかは今後の検討課題である.
最後にユーザモデル・タスクモデルと環境との相互関 係について考察する.本研究では図 1 に示されるよう に,従来ドライバモデルとして 1 つと考えられていた 部分をユーザモデルとタスクモデルの 2 つに分離した. よって環境における要因がタスクモデルと関係するか, ユーザモデルと関係するかを検討する必要がある.当 然のことながらタスクモデルとユーザモデルの間にも 相互作用がある.まず運転行動の発生のプロセスを考 える.ユーザモデルにおいて運転経路が決定され,環 境と相互作用をしながら指定された経路を進むよう運 転行動が生成される.より詳細には,経路上の外的環 境(道路状況や周囲の車両の挙動など)を知覚しつつ, 右左折や加減速などタスクモデルにより発生したタス クを遂行するためユーザモデルが行動を生成する.つ まりユーザモデルはタスクモデルからタスクを,環境 から情報を得るという関係を有する.一方,現在走行 中の道路状況などからタスクモデルは相当するタスク を発生する.環境における静的な情報として地理情報
(道路の幅や交差点までの距離)があり,これはタスク モデルに影響を与えると考えられる.信号の色や周囲 の車両の挙動など動的な情報はドライバの知覚に作用 するためユーザモデルへの影響が大きいが,対向車の 通過頻度や歩行者の横断などは明らかに停止というタ スクを発生させるため,タスクモデルにも寄与すると 考えられる.よって環境の要因はタスクモデルかユー ザモデルの一方に影響を及ぼすものと,双方に及ぼす
ものの 2 つに分けられる.標準化を進めるにあたりタ スクモデルが関係する環境要因の特定と,それがタス クモデル特有の関係かユーザモデルを含むものなのか を精査することが今後の課題である.
6 おわりに
本研究では車載センサーデータからのドライバモデ リングにおいて,協調領域を競争領域と区別し用途に 依存しない自動車 AI に共通するデータ分析処理の標準 化を試みた.具体的にはタスクモデルをユーザモデル と分離し,センサーデータから行動の意味を解釈する ためのラベリング手法を提案した.ラベリングはデー タの離散化と構文解析によるラベル付与の 2 つのプロ セスから構成される.バッカス・ナウア記法による文 法を用いてペダル操作の基本的ラベルの定式化を行い, 運転行動データに適用した.急な減速などを行った地 点の抽出に成功したことから提案法の有効性が確かめ られた.
謝辞
本研究の一部は NEDO 委託事業「人間と相互理解で きる次世代人工知能技術の研究開発」,SCAT 研究助 成,科研費 15K00299 の支援を受けた.
参考文献
[1] 人間生活工学研究センター 運転行動データベース, http://hql.jp/database/drive/index.html [2] Hopcroft, John E. and Motwani, Rajeev and Rot-
wani and Ullman, Jeffrey D.: ”Introduction to Automata Theory, Languages and Computabil- ity”, Addison-Wesley Longman Publishing Co., Inc., 2000.
[3] Chomsky, Noam: ”Three Models for the Descrip- tion of Language,” IRE Transactions on Infor- mation Theory, Vol. 2 No. 2, pp. 113-123, 1956. [4] Knuth, Donald E.: ”Backus Normal Form vs.
Backus Naur Form”, Communications of the ACM. Vol. 7 No. 12, pp. 735?736, 1964.
[5] レイワード・スミス: ”コンピュータ・サイエンス のための言語理論入門”, 共立出版, 1986.