避難シミュレーションを用いた避難計画のトレードオフ
分析手法
野田五十樹
,
松島裕康
産業技術総合研究所
DRIS-2018-03
1
はじめに
災害対策を含む多くの社会問題は、ジレンマ状態におけるトレードオフ問題である。例えば、避 難計画の策定とは、避難時間の最小化という単純な最適化問題ではない。もちろん、与えられた条
件において、住民全員の避難時間を最短にする誘導方策というのは数学的には存在しうる[2]。し
かし実際には、予め避難用の設備を造るなどすれば避難時間をより短くできるだろうし、一方で、 その誘導の指示が住民全員に行き渡らない、あるいは従わないことを当然想定せざる得ない。ま た、生命の安全が最優先とはいえ、そのために過大な経済的負担や精神的負担などが生じ、社会活 動自体が停滞しては元も子もなくなってしまう。つまりは、災害対策とは、負担できる範囲のコス トで生命の安全を最大化する、トレードオフ問題として捉えるべきである。
このトレードオフ問題に対する取り組みの第一歩として、どのようなトレードオフ構造になって いるのか、という理解が必要である。トレードオフというのは、通常、多目的最適化問題と捉え ることができる。上記の避難の例では、生命の安全の最大化という目的関数と、経済的・精神的負 担の最小化という目的関数の、2つの目的関数の多目的最適化として問題を捉えることができる。 このような問題に対するアプローチとして、複数の目的関数に一定の重みをつけ、その和を単一の 目的関数として最適化問題を解く、という考え方がある。しかしこのアプローチでは、そもそも、 どういう重みにするのが妥当なのか、という問題を解かねばならない。別のアプローチとしては、 その多目的最適化問題のパレート効率な解を求め、その解がどのように分布するのか、ということ を調べる方法がある。この方法は問題のトレードオフ構造が理解できるというメリットがあるが、 多数の解を求めることが必要である、という問題がある。
本稿では、上記の2つのアプローチのうち、後者の立場、つまり、パレート解をできるだけ求 め、その構造を分析する方法をとり、津波避難を題材に、計算機シミュレーションでどのような分 析を行うことができるかを示していきたい。
2
避難シミュレーション
本研究では、避難シミュレーションを行う上で、これまで開発を進めてきている人流シミュレー
タ CrowdWalk [4] を用いる。このシミュレータの特徴は、人が歩きまわる空間(地図)を経路の
ネットワークとして表し、そのネットワーク上を並んで人が歩くと簡単化することで、大規模(広 範囲の地域・大人数)な人流を高速にシミュレーションできる点にある。
CrowdWalkでは、人はエージェントとして表され、各々のエージェントは個別に出発地点と経 由地、目的地、出発時間を与えることができる。経由地や目的地へは最短経路にそって移動するこ とを基本的な原理としているが、分岐点での経路選択を細かい条件により制御できる機構も備えて いる。
地図としては、独自に地図を構築・編集できるツールの他、商用の地図データや Open Street
Map の地図データからシミュレータ用の地図に変換するツールを用意しており、任意の地区のシ
ミュレーションを簡易に準備できるようになっている。
3
網羅的シミュレーション管理フレームワーク
パレート解を求める上で、多数のシミュレーションを行う枠組みとして、網羅的シミュレーショ
ン管理フレーム枠OACIS [3]をもちいる。OACISは、最大数百万におよびシミュレーションにつ
いて、データベースを活用してその実行管理を確実・頑健に薦めるためのフレームワークである。
OACISの利用者は、利用するシミュレータと、試したいシミュレーション設定のパラメータセット
を指定する。これに基づいてOACISは、利用可能な計算サーバに対して並行してシミュレーショ
ン実行を依頼し、その結果をデータベースに格納する。シミュレーションが非常に多数に渡る場合、
場合に寄って同じパラメータを重複して実行してしまう場合があるが、OACISではそれをデータ
ベースでチェックし、重複した設定の実行は極力行わない仕掛けを用意している。
パレート解を求める仕組みとして、われわれは遺伝的アルゴリズム(GA)による多目的最適化の
手法の一つであるNSGA-II[1]を用いる。OACIS は基本的に、与えられたパラメータのセットの
組み合わせを網羅的に実行していくが、プラグインを用意することで、その組み合わせをこれまで のシミュレーション結果に基づいて動的に指定していくことが可能になっている。この機能を用い
て、われわれは NSGA-IIのOACIS用モジュールを作成し、パレート解をGA的に探索していく
ことを試みた。
4
多目的最適化としての避難計画
避難計画における目的関数として、本稿では、避難時間、避難誘導の簡潔さ、避難所の容量オー
バの最小化の3つを取り上げる。
避難時間については言うまでもなく、対象地域の全員が避難所に到達する最終時間であり、それ をできるだけ短くすることを目的関数とする。
避難誘導の簡潔さとしては、同じ地区の人に対しできるだけまとまって指示を出せることを良し とする評価関数を用意した。避難誘導としては、細かい地区ごとにきめ細かく指定するほうが、避 難途中における混雑を避けるなど効率の良い避難ができる可能性がある。一方で、そのような避難 指示を周知することはなかなか難しいという問題もある。避難指示の周知の面から考えると、避難 指示はできるだけ簡潔であり、また、広い地域についてまとめて支持できる方が効果的であると考 えられる。よって、本研究では避難誘導を簡潔にするという目的関数を導入する。
この目的関数を数値化するために、われわれは避難誘導におけるエントロピーを取り上げた。例
えば、ある N 人の地区に対し、m人には避難所Aに向かい、残りの N−m 人には別の避難所
Bに向かうという指示をしたとする。この指示のエントロピーを以下の式で定義する。
E = −m N log
m N −
N−m N log
N−m
N (1)
この値は、m= 0または m=N の時に最小になる。つまり、1つの地区に対し目的地を1つに
絞って単純化するほど、この値は小さくなることになる。
3つ目の評価関数、避難所の容量オーバは言葉のとおりである。指定避難所には各々避難受け入
れ人数が決められている。この人数は避難の際に制約として考えられるが、ここでは比較的ゆる
い制約としてとらえ、最適化の目的関数の一つとみなすことにする。つまり、受け入れ人数が100
人となっている避難所があった時に、それを制約として考えてしまうと、101人目の避難者を排除
しなければならないことになる。しかし、緊急の避難の際にそのような厳密な排除はされないであ
ろう。一方で、100人用の避難所に1000人が押しかけては、それをとても受け入れることは出来
ない。この、受け入れられる人数をきっちりきめることはなかなか難しい問題である。よって、本 研究ではこれを目的関数として捉え、人数オーバはできるだけ抑えつつ、効率の良い避難方法を探 す、というアプローチをとることにする。
5
避難計画のパレート解分析
2 節および3 節で述べたソフトウェアを活用して、避難計画におけるパレート解の構造を明ら
かにする実験を行った。避難計画の対象地域としては、徳島県の沖洲地域(図 1)を用いた。地図
の規模としては、2,916リンク、2,492ノード(交差点)で、そこに19,886エージェントが避難する
とした。エージェントの発生地点としては、この地区を町丁目に従い99区域に分割している。ま
た、最終目的地としては、この地区の指定避難所15箇所を選ぶことにしている。探索の目的関数
としては、4 節 にあげた3つを用いる。
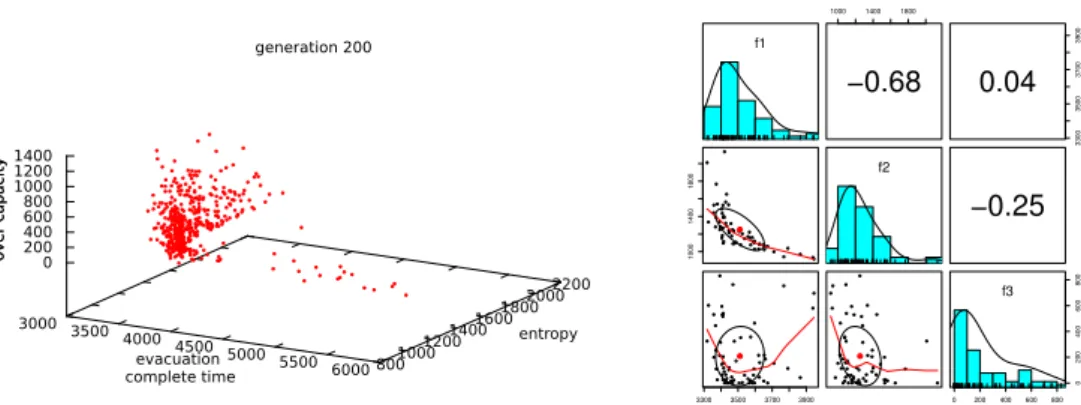
図 2に、求められたパレート解の分析結果をチャート図として示す。このチャートから、避難
時間と誘導の簡潔さが強いトレードオフ関係にあることがわかる。つまり、避難時間を最適化する ためには誘導をかなり細かく指示しなければならないことがわかる。また、避難時間と避難所の容 量オーバについては弱い相関があることがわかる。つまり、避難時間を短くするためには、ある程 度、避難所の受け入れ人数に柔軟性を持たせることが必要であることが読み取れる。ただ、それほ ど強いトレードオフではないことから、かなり無理な受け入れをしなくても、適した避難方法があ り得ることが推察できる。
図1: Simulated Area (Okinosu, Tokushima) and Its Road Network
6
おわりに
本稿では、避難計画を多目的最適化のトレードオフ問題として捉え、避難シミュレーションを用 いてそのトレードオフ構造を明らかにすることを試みた。その結果、避難に関わる目的関数のう
3000 3500
4000 4500
5000 5500 6000 800
1000 1200 1400 1600
1800 2000 2200 0 200 400 600 800 1000 1200 1400 o v e r c a p a c ity generation 200 evacuation complete time entropy o v e r c a p a c ity f1
1000 1400 1800
−0.68 3300 3500 3700 3900 0.04 1000 1400 1800 f2 −0.25
3300 3500 3700 3900 0 200 400 600 800
0 200 400 600 800 f3
図 2: Acquired Evacuation Plans (left) and Correlation Analysis (right)
ち、避難時間と避難誘導の簡潔さ、および避難時間と避難所容量のオーバについて、トレードオフ があることを読み解くことができた。ただしこの結果は、地域や設定で変わっていくものであり、 一般論として敷衍することはできない。一方で、地域や条件を限定することで、このような分析に よりトレードオフ状態の認識や、よりより避難計画の探索や、地域住民を含めたコンセンサス確立 へ向けたとりくみに有用な情報・分析を行うことを示すことができていると考えられる。
本稿で取り上げた目的関数は3つであるが、実際にはもっと多様な目的関数を考えていく必要が
ある。そのためには、より効率的なパレート解探索手法と同時に、多次元におけるトレードオフの 分析手法も求めていくことが、今後は必要になる。
謝辞
本研究は文部科学省ポスト「京」萌芽課題2「複数の社会経済現象の相互作用のモデル構築とそ の応用研究(多層マルチ時空間スケール社会・経済シミュレーション技術の研究・開発)」 の元で 実施したものです。また、本研究で実施したシミュレーションの一部は、理化学研究所のスーパー コンピュータ「京」を利用して得られたものです(課題番号:hp170345)。
参考文献
[1] K. Deb, S. Agrawal, A. Pratap, and T. Meyarivan. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: Nsga-ii. In Schoenauer M. et al, editor,
PPSN VI Proceedings of the 6th International Conference on Parallel Problem Solving from Nature, pages 849–858, Berlin, Heidelberg, 2000. Springer.
[2] K. Kobayashi, R. Narisawa, Y. Yasui, and K. Fujisawa. Experimental analyses of the
evacu-ation planning model using lexicographically quickest flow [in japanese]. Transactions of the
Operations Research Society of Japan, 59:86–105, 2016.
[3] Yohsuke Murase, Takeshi Uchitane, and Nobuyasu Ito. A tool for parameter-space
explo-ration. InPhysics Procedia 57, pages 73–76, 2014.
[4] Itsuki Noda and Tomohisa Yamashita. Pedestrian simulator with flexible framework to
en-hance detailed behavior and environmental change. Artificial Life and Robotics, 22(3):308–
315, Sep. 2017.