sig sai 2009 03 04 24 Recent site activity jsaisigsai
5
0
0
全文
図
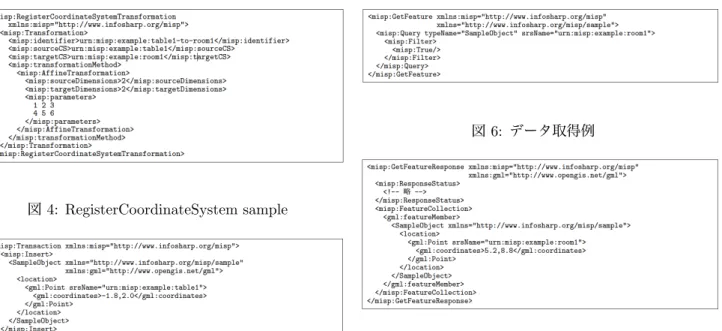
![図 9: 実験に使用した災害救助ロボット Kenaf 図 10: 実験でのデータの流れ 6 まとめと今後の課題 複数の移動ロボット情報統合のための座標系モデル を提案,実装し複数のロボットを用いて実験を行った. 今回のモデルでは座標系変換自体にはノイズの考慮が 無く,複数の変換経路がある場合は,ノイズが最小と なる経路を使うべきであり,ノイズをどう扱うかは今 後の課題である. 参考文献 [1] 中央防災会議「防災情報の共有化に関する専門調 査会」: 防災情報の共有化に関する専門調査会報 告, 平成 15 年](https://thumb-ap.123doks.com/thumbv2/123deta/5698638.16710/5.892.91.426.122.441/ロボットデータまとめロボットモデルロボットに関するに関する.webp)
関連したドキュメント
スライド5頁では
このため、都は2021年度に「都政とICTをつなぎ、課題解決を 図る人材」として新たに ICT職
となる。こうした動向に照準をあわせ、まずは 2020
そして,我が国の通説は,租税回避を上記 のとおり定義した上で,租税回避がなされた
なお、保育所についてはもう一つの視点として、横軸を「園児一人あたりの芝生
この点について結果︵法益︶標準説は一致した見解を示している︒
原則としてメール等にて,理由を明 記した上で返却いたします。内容を ご確認の上,再申込をお願いいた
今年は、目標を昨年の参加率を上回る 45%以上と設定し実施 いたしました。2 年続けての勝利ということにはなりませんでし
